一种波形梁护栏高度测量装置及测量方法与流程
本发明涉及高速公路基础设施检测,特别涉及一种波形梁护栏高度测量装置及高度测量方法。
背景技术:
1、波形梁钢护栏是一种重要的交通安全基础设施,其用来防止失控车辆冲出道路,降低交通事故后果的严重程度,保障道路使用者的生命安全,减少财产损失。
2、当前,测量护栏高度是选取波形梁护栏板波谷水平中线相对于护栏基础的垂直距离。在定点高度测量方法方面,竖直尺和水平尺搭接的方法是最为常用的测量方法,检测人员通过调整竖直尺与水平尺的相对位置,可以针对性的进行高度采样,检测效率不高;为了提高检测效率,现有的快速检测设备通常在护栏上自主运行的护栏巡检机器人,巡检机器人上设置测距传感器,以获得护栏的高度,但是这种巡检机器人往往受到护栏形态变化及过渡带的限制,出现难以逾越、运行停顿的问题,且设备电池易被运动模块消耗,工作时长受到严重限制,很难兼顾大范围长距离的巡检作业。
技术实现思路
1、为此,本发明提出一种非接触式检测波形梁钢护栏高度的测量装置及方法,能够支持波形梁钢护栏的自动化日常巡检。
2、针对上述技术问题,本发明提供如下技术方案:
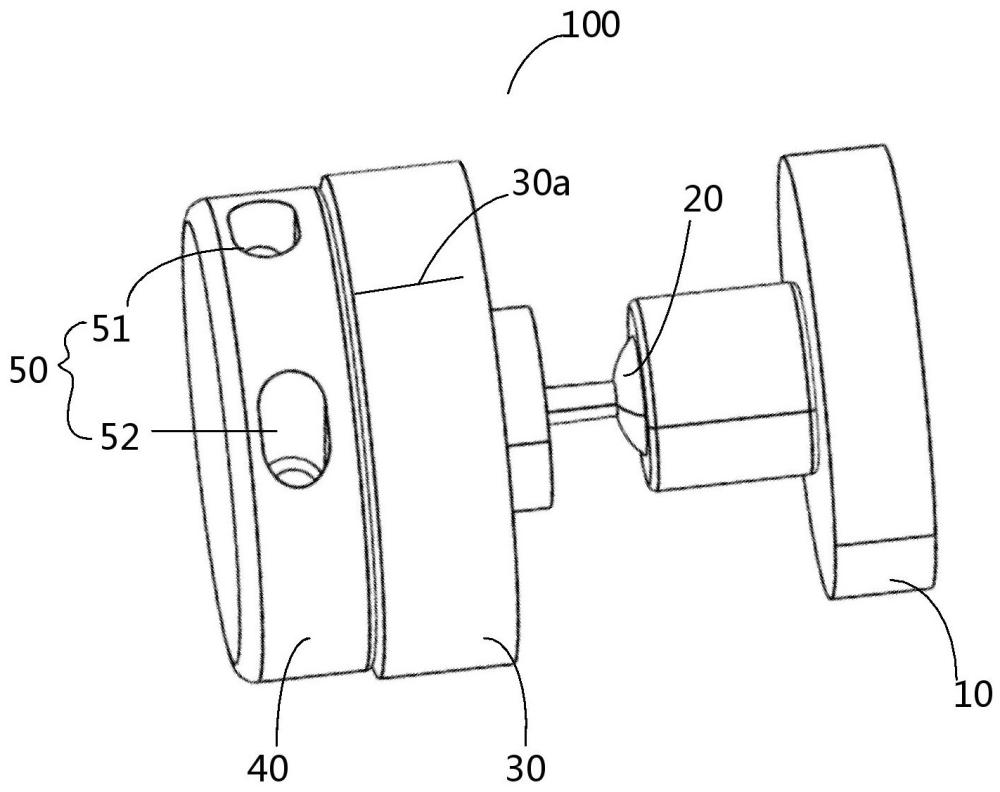
3、一种波形梁护栏高度测量装置,包括:安装底座;固定支撑座,通过万向节连接于所述安装底座上;旋转支撑座,可旋转地连接于所述固定支撑座上;测距传感器,设置于所述旋转支撑座的旋转周面上,其包括发射端与接收端,所述发射端用于发射光信号,所述接收端用于接受障碍物反射的光信号。
4、本发明的部分实施方式中,所述固定支撑座具有旋转槽,所述旋转支撑座转动连接于所述固定支撑座的旋转槽上。
5、本发明的部分实施方式中,所述固定支撑座的外周面设有与所述旋转支撑座的旋转中心线平行设置的极轴刻度线。
6、本发明同时提供一种波形梁护栏高度测量方法,其采用所述的高度测量装置,包括如下步骤:
7、s1.将安装底座安装于行走终端或固定终端上,所述行走终端的行走方向与波形梁护栏的延伸方向一致,所述旋转支撑座的旋转中心方向与所述波形梁护栏的延伸方向一致;
8、s2.控制所述旋转支撑座按设定频率转动,进行数据采集;
9、s3.在测距传感器旋转一周的数据中判断波形梁护栏的纵向中心位置与路面的极坐标信息;
10、s4.将波形梁护栏的纵向中心位置极坐标信息转换为直角坐标值,将路面的极坐标信息转换为直角坐标值进行直线拟合得到路面的直线方程;
11、s5.根据波形梁护栏的纵向中心位置的直角坐标值与路面的直线方程计算得到波形梁护栏的纵向中心位置至路面之间的距离。
12、本发明的部分实施方式中,步骤s1中,安装所述安装座时,使旋转支撑座的旋转中心线与所述波形梁护栏的纵向中心线基本保持在同一水平面上。
13、本发明的部分实施方式中,所述固定支撑座的外周面设有与所述旋转支撑座的旋转中心线平行设置的极轴刻度线;步骤s1中,初始状态时,调节万向节使所述极轴刻度线位于固定支撑座顶部中心,所述测距传感器的发射端与接收端分别位于所述极轴刻度线的两侧且相距所述极轴刻度线的距离一致。
14、本发明的部分实施方式中,步骤s3中,所述极坐标信息为),其中为检测范围内障碍物上某点距离测距传感器的直线距离,为该点的极角;其中,判断双波形梁护栏纵向中心位置采用以下方法:在变大的过程中,找到从小变大,再从大变小过程中的最大值max,记录max对应的极角max,获得双波形梁护栏的纵向中心位置的极坐标值为(max ,max);判断三波形梁护栏纵向中心位置采用以下方法:在变大的过程中,找到从大变小,再从小变大过程中的最小值min,其中上述过程进行三次,分别获得min1、min2、min3,记录min2对应的极角min2 ,获得三波形梁护栏的纵向中心位置的极坐标值为(min2 ,min2)。
15、本发明的部分实施方式中,步骤s3中,以下方法判断路面的极坐标信息:取∈(130°,180°)的极坐标信息作为路面的极坐标数据点。
16、本发明的部分实施方式中,步骤s4中,将路面的极坐标信息转换为直角坐标值进行直线拟合得到路面的直线方程包括:
17、将所述路面的极坐标信息)根据如下公式转换为直角坐标):
18、
19、再将路面的转换后的直角坐标点进行直线拟合,得到路面的直线方程,记为。
20、本发明的部分实施方式中,步骤s5中,采用如下公式获得波形梁护栏的纵向中心位置至路面之间的距离:
21、
22、其中,()为波形梁护栏的纵向中心位置的直角坐标值, a\b\c为路面的直线方程中的系数。
23、本发明的技术方案相对现有技术具有如下技术效果:
24、本发明提供的高度测量装置中,通过将测距传感器安装于旋转支撑座上,在进行波形梁护栏高度测量时,通过控制旋转支撑座相对固定支撑座按设定频率转动至少一周,进行数据采集,以判断波形梁护栏的纵向中心线的位置以及路面位置,进而计算波形梁护栏的纵向中心线至路面的距离,以实现波形梁护栏高度的测量。由于该高度测量装置可通过安装座安装于与波形梁护栏隔离的其他终端上,其测量效果不受波形梁护栏形态变化及过渡带的限制,能够支持波形梁钢护栏的自动化日常巡检。
技术特征:
1.一种波形梁护栏高度测量装置,其特征在于,包括:
2.根据权利要求1所述的一种波形梁护栏高度测量装置,其特征在于,所述固定支撑座具有旋转槽,所述旋转支撑座转动连接于所述固定支撑座的旋转槽上。
3.根据权利要求1所述的一种波形梁护栏高度测量装置,其特征在于,所述固定支撑座的外周面设有与所述旋转支撑座的旋转中心线平行设置的极轴刻度线。
4.一种波形梁护栏高度测量方法,其特征在于,采用权利要求1-3任一所述的高度测量装置,包括如下步骤:
5.根据权利要求4所述的一种波形梁护栏高度测量方法,其特征在于,步骤s1中,安装所述安装座时,使旋转支撑座的旋转中心线与所述波形梁护栏的纵向中心线基本保持在同一水平面上。
6.根据权利要求5所述的一种波形梁护栏高度测量方法,其特征在于,所述固定支撑座的外周面设有与所述旋转支撑座的旋转中心线平行设置的极轴刻度线;步骤s1中,初始状态时,调节万向节使所述极轴刻度线位于固定支撑座顶部中心,所述测距传感器的发射端与接收端分别位于所述极轴刻度线的两侧且相距所述极轴刻度线的距离一致。
7.根据权利要求4所述的一种波形梁护栏高度测量方法,其特征在于,步骤s3中,所述极坐标信息为),其中为检测范围内障碍物上某点距离测距传感器的直线距离,为该点的极角;
8.根据权利要求4所述的一种波形梁护栏高度测量方法,其特征在于,步骤s3中,以下方法判断路面的极坐标信息:取∈(130°,180°)的极坐标信息作为路面的极坐标数据点。
9.根据权利要求4所述的一种波形梁护栏高度测量方法,其特征在于,步骤s4中,将路面的极坐标信息转换为直角坐标值进行直线拟合得到路面的直线方程包括:
10.根据权利要求4所述的一种波形梁护栏高度测量方法,其特征在于,步骤s5中,采用如下公式获得波形梁护栏的纵向中心位置至路面之间的距离:
技术总结
本发明公开一种波形梁护栏高度测量装置及测量方法,该高度测量装置包括:安装底座;通过万向节连接于安装底座上的固定支撑座;可旋转地连接于固定支撑座上的旋转支撑座;设置于旋转支撑座的旋转周面上的测距传感器,其包括发射端与接收端,发射端用于发射光信号,接收端用于接受障碍物反射的光信号。本发明在进行波形梁护栏高度测量时,通过控制旋转支撑座相对固定支撑座按设定频率转动至少一周以进行数据采集,通过判断波形梁护栏的纵向中心线的位置以及路面位置,进而计算波形梁护栏的纵向中心线至路面的距离,以实现波形梁护栏高度的测量。由于该高度测量装置可通过安装座安装于与波形梁护栏隔离的其他终端上,其测量效果不受波形梁护栏形态变化的限制,能够支持波形梁钢护栏的自动化日常巡检。
技术研发人员:班晓京,辛欣,周志伟,贾宁,卢健,幺瑶,冯移冬
受保护的技术使用者:交通运输部公路科学研究所
技术研发日:
技术公布日:2024/5/12
- 还没有人留言评论。精彩留言会获得点赞!