一种基于多维数据的道路勘探评估方法、系统及存储介质与流程
本发明涉及道路病害识别,具体涉及一种基于多维数据的道路勘探评估方法、系统及存储介质。
背景技术:
1、道路勘探的目的是评估道路的结构完整性、地质情况等,以确保道路的安全和耐久性。
2、传统方法通常依赖于视觉检查和手动测量,无法全面获取道路的地下结构信息,地下空洞和裂缝等问题可能隐藏在地表下,难以通过目视检查发现,并且传统方法下,路面病害的识别依赖于人工观察,容易受到主观因素和操作者技能水平的影响,导致识别和评估的一致性和准确性不足,而且传统方法下,处理大量数据和生成综合地图的效率低下,常常依赖于手工绘制和记录,耗时且容易出现错误,并且传统方法生成的报告和记录可能缺乏清晰的信息表达和视觉化,难以为决策者提供直观的理解和快速的决策支持。
技术实现思路
1、本发明目的是针对背景技术中存在的问题,提出一种基于多维数据的道路勘探评估方法、系统及存储介质。
2、本发明的技术方案:一种基于多维数据的道路勘探评估方法,包括:
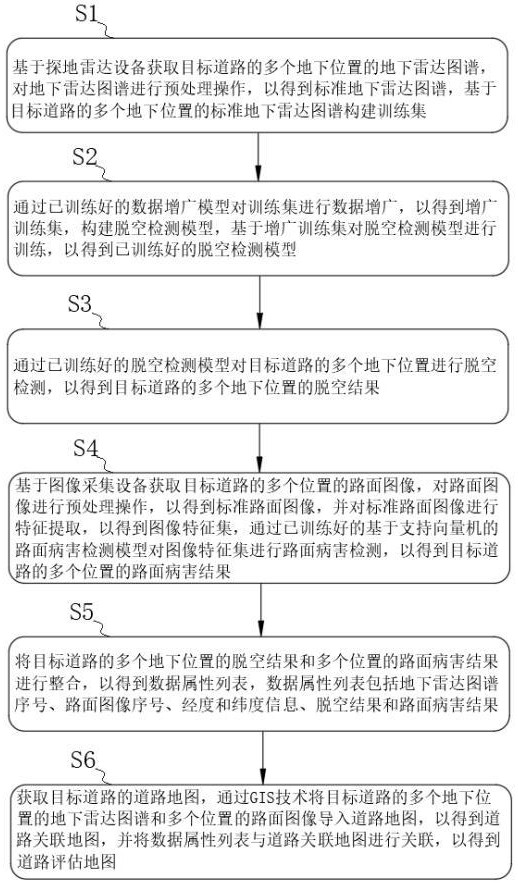
3、基于探地雷达设备获取目标道路的多个地下位置的地下雷达图谱,对所述地下雷达图谱进行预处理操作,以得到标准地下雷达图谱,基于目标道路的多个地下位置的标准地下雷达图谱构建训练集;
4、通过已训练好的数据增广模型对所述训练集进行数据增广,以得到增广训练集,构建脱空检测模型,基于所述增广训练集对所述脱空检测模型进行训练,以得到已训练好的脱空检测模型;
5、通过所述已训练好的脱空检测模型对所述目标道路的多个地下位置进行脱空检测,以得到所述目标道路的多个地下位置的脱空结果;
6、基于图像采集设备获取目标道路的多个位置的路面图像,对所述路面图像进行预处理操作,以得到标准路面图像,并对所述标准路面图像进行特征提取,以得到图像特征集,通过已训练好的基于支持向量机的路面病害检测模型对所述图像特征集进行路面病害检测,以得到所述目标道路的多个位置的路面病害结果;
7、将所述目标道路的多个地下位置的脱空结果和多个位置的路面病害结果进行整合,以得到数据属性列表,所述数据属性列表包括地下雷达图谱序号、路面图像序号、经度和纬度信息、脱空结果和路面病害结果;
8、获取所述目标道路的道路地图,通过gis技术将所述目标道路的多个地下位置的地下雷达图谱和多个位置的路面图像导入所述道路地图,以得到道路关联地图,并将所述数据属性列表与所述道路关联地图进行关联,以得到道路评估地图。
9、优选的,对所述地下雷达图谱进行预处理操作,以得到标准地下雷达图谱,包括:
10、对所述地下雷达图谱进行静校正,所述静校正公式如下:
11、;
12、其中,表示静校正后的地下雷达图谱,表示在时刻地下雷达图谱中的幅值,表示向左平移的时间,表示地下雷达图谱中最大幅值位置处的时间;
13、对所述地下雷达图谱进行直流漂移,所述直流漂移公式如下:
14、;
15、其中,表示直流漂移后的地下雷达图谱,表示直流漂移前的地下雷达图谱,表示地下雷达图谱中采样点的总数;
16、对所述地下雷达图谱进行带通滤波,所述带通滤波公式如下:
17、;
18、其中,表示带通滤波后的地下雷达图谱,表示地下雷达图谱的频域特征,表示带通滤波器。
19、优选的,所述数据增广模型采用改进的consingan网络,所述consingan网络包括生成器和判别器,所述生成器用于从所述训练集中学习真实样本分布,并基于所述真实样本分布生成假样本,所述判别器用于对所述假样本进行判断,并通过特征学习模块和损失函数改进所述consingan网络的所述生成器,所述特征学习模块包括第一子模块、第二子模块和第三子模块,所述第一子模块用于采用最大池化方式进行特征学习,以得到第一特征图,所述第二子模块用于采用平均池化方式进行特征学习,以得到第二特征图,将所述第一特征图与输入特征图进行点乘运算,以得到第三特征图,将所述第二特征图与输入特征图进行点乘运算,以得到第四特征图,将所述第三特征图和所述第四特征图进行特征融合操作,以得到融合特征图,所述第三子模块用于通过卷积层降低所述融合特征图的通道数目,并通过sigmoid函数对降低通道数目后的所述融合特征图进行非线性激活,以得到输出特征图,将所述输出特征图和所述输入特征图进行点乘运算,以得到最终的特征图。
20、优选的,所述特征融合操作公式如下:
21、;
22、其中,表示融合特征图,表示第三特征图,表示第四特征图。
23、优选的,所述损失函数如下:
24、;
25、其中,表示对抗损失,和分别表示训练阶段n时的生成器和判别器,表示人为设置的权重,表示重建损失。
26、优选的,所述重建损失公式如下:
27、;
28、其中,表示训练阶段n-1时重建后输出的特征图,表示上采样操作,表示固定的输入特征图,表示训练阶段n时的特征图。
29、优选的,所述脱空检测模型采用改进的yolov7-tiny模型,并通过加强注意力模块对所述yolov7-tiny模型进行改进,所述加强注意力模块包括通道注意力模块和空间注意力模块,所述通道注意力模块用于对所述目标道路的多个地下位置的标准地下雷达图谱的第一图谱特征,所述空间注意力模块用于对所述目标道路的多个地下位置的标准地下雷达图谱的第二图谱特征,将所述第一图谱特征和所述第二图谱特征逐元素相加,以得到目标特征注意图谱特征。
30、优选的,所述通道注意力模块表达式如下:
31、;
32、其中,表示第一图谱特征,表示共享多层感知机,表示全局平均池化,表示最大池化,表示目标道路的多个地下位置的标准地下雷达图谱。
33、优选的,所述空间注意力模块表达式如下:
34、;
35、其中,表示第二图谱特征,表示7×7大小的卷积操作。
36、优选的,所述目标特征注意图谱特征表达式如下:
37、;
38、其中,表示目标特征注意图谱特征,表示逐元素相乘,表示逐元素相加。
39、优选的,对所述标准路面图像进行特征提取,以得到图像特征集,包括:
40、对所述标准路面图像的纹理特征进行提取,所述纹理特征提取公式如下:
41、;
42、其中,表示纹理特征结果,表示标准路面图像幅度方向,表示相隔距离,表示标准路面图像中a区域的邻域,表示概率求解结果;
43、对所述标准路面图像的颜色特征进行提取,所述颜色特征提取公式如下:
44、;
45、其中,表示颜色特征,和分别表示标准路面图像不同区域内的亮度方差;
46、对所述标准路面图像的距离特征进行提取,所述距离特征提取公式如下:
47、;
48、其中,表示标准路面图像序列最小化映射到一条直线上连续函数距离,表示连续函数,和表示标准路面图像不同区域内的映射点,表示邻近矩阵
49、将所述标准路面图像的纹理特征、颜色特征和距离特征进行组合,以得到图像特征集。
50、优选的,将所述数据属性列表与所述道路关联地图进行关联,以得到道路评估地图,包括:
51、定义显示图层,所述显示图层用于显示所述目标道路的多个地下位置的脱空结果和多个位置的路面病害结果;
52、将所述数据属性列表中的所述经度和纬度信息作为关键字段,与所述道路关联地图上的相应点标记进行关联,从而在所述道路关联地图上生成所述显示图层;
53、设定所述道路关联地图不同的颜色和形状,用于区分所述脱空结果和所述路面病害结果。
54、本发明的技术方案:一种基于多维数据的道路勘探评估系统,其适用于上述的一种基于多维数据的道路勘探评估方法,包括:
55、数据处理模块,所述数据处理模块用于获取目标道路的多个地下位置的地下雷达图谱,并进行预处理操作,以生成标准地下雷达图谱,并基于标准地下雷达图谱构建训练集,用于训练脱空检测模型;
56、数据训练模块,所述数据增广模块用于通过数据增广模型对训练集进行增广,以得到增广训练集,并使用增广训练集来训练脱空检测模型,以得到已训练好的脱空检测模型;
57、图像处理模块,所述图像处理模块用于获取目标道路的多个位置的路面图像,并对这些图像进行预处理操作,以得到标准路面图像,并从标准路面图像中提取特征,形成图像特征集;
58、病害检测模块,所述病害检测模块用于基于支持向量机对图像特征集进行路面病害检测;
59、地图生成模块,所述地图生成模块将脱空检测结果和路面病害检测结果整合为数据属性列,并使用gis技术将地下雷达图谱、路面图像和数据属性列表导入到道路地图中,以生成道路评估地图。
60、本发明的技术方案:一种基于多维数据的道路勘探评估存储介质,其适用于所述的一种基于多维数据的道路勘探评估方法,包括:至少一个处理器和存储器;
61、所述存储器用于存储计算机执行指令;
62、所述至少一个处理器用于执行所述存储器存储的计算机执行指令,以实现上述的一种基于多维数据的道路勘探评估方法。
63、与现有技术相比,本发明的上述技术方案具有如下有益的技术效果:
64、本发明通过结合地下雷达图谱和路面图像,能够全面获取道路不同层次的信息,包括地下结构和路面状态,且对地下雷达图谱和路面图像进行预处理和标准化操作,有助于提高数据质量和可比性,使得后续分析和模型训练更加有效和准确,并且利用已训练好的数据增广模型对训练集进行增广,然后构建脱空检测模型和路面病害检测模型,从而能够提高模型的泛化能力和适应性,确保模型在各种实际场景中的有效性。
65、本发明通过脱空检测和路面病害检测,综合评估道路的地下结构健康和路面的使用状况,能够提供全面的道路健康状态分析,通过结合gis技术,将地下雷达图谱、路面图像和相关属性导入道路地图,生成道路评估地图,从而可以提供直观且易于理解的地图视觉化,帮助决策者快速分析和理解道路的整体情况,而且基于详细的道路评估地图,能够精确规划和优化道路维护和修复计划,有效利用资源,延长道路使用寿命,且通过持续的监测和维护,可以改善道路使用体验,减少驾驶风险和车辆损坏,提升交通流畅性和效率。
- 还没有人留言评论。精彩留言会获得点赞!