一种完全自主可控快速时间频率同步装置和方法与流程
1.本发明属于时间频率同步技术领域,特别涉及该领域中的一种完全自主可控快速时间频率同步装置和方法。
背景技术:
2.时间同步是指时间服务器从时间源(例如gnss)获取标准时间,并将时间信息通过时间分配链路发送到时间同步客户端,实现与时间源时间同步的过程。频率同步是通过频率比对的方式,将分布于不同地点频率源的频率值调整到一定的准确度并确保频率相位同步的过程。
3.目前,使用较为广泛的高精度时间同步技术有ntp网络时间协议和ptp精确时间协议等,其中ntp(network time protocol,网络时间协议)是由rfc
‑
1305定义的时间同步协议,用于在分布式时间服务器和客户端之间进行时间同步。ntp授时基于双向传输时延对等的原理,其协议中包含世界协调时(utc)的时间戳,但由于ntp的时间戳标记在应用层,受网络流量及路由等因素的影响,ntp授时精度只有毫秒量级。ptp精确时间协议实现原理与ntp基本相同,最大的不同在于ptp的时间戳标记是在物理层,最大限度减少了时间传输误差,因此授时精度可达微秒量级。ntp授时一般由ntp时间服务器和客户端组成,而ptp授时由主时间服务器和从时间服务器以及客户端组成,由于ptp授时需要从时间服务器,因此目前ptp协议在很多客户端不能直接使用,这也是ntp协议较ptp协议应用更加广泛的主要原因。
4.传统的频率同步技术主要是模拟锁相环技术,如图1所示,由鉴相器、环路滤波器和压控振荡器三部分模拟电路组成,其中鉴相器用来比对输入与输出信号之间的相位差并输出电压误差;环路滤波器在滤除输出信号中的噪声和干扰后形成控制电压提供给压控振荡器;压控振荡器会根据控制电压输出调整后的频率,而调整后的频率又反馈回鉴相器端,如此反复鉴相、滤波、调整,最终当压控振荡器输出频率以固定的相位关系被牢牢锁定在输入信号的相位上时,即完成锁相。近年来,随着科学技术的飞速发展和自动化程度的不断提高,数字锁相环技术得到了广泛应用,数字锁相环技术的工作原理和锁定过程与模拟锁相环大致相同,但由于采用了数字技术,极大提高了频率同步的精度和稳定性,因此已经成为频率同步领域工程应用的首选技术途径。
5.随着各领域新技术和新业务的不断推陈出新以及国际政治军事局势的不断摩擦升级,时频领域对时间频率同步装置提出了更高的要求:一是完全自主可控;二是快速捕获锁定;三是高频率准确度和稳定度;四是优异的网络授时性能,大的用户容量;五是温度范围广、可靠性高。
技术实现要素:
6.本发明所要解决的技术问题就是提供一种完全自主可控快速时间频率同步装置和方法,可作为频率基准源和授时标准在军事、通信、电力、金融等领域发挥极其重要的作用。
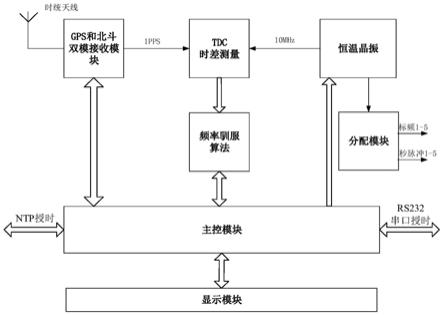
7.本发明采用如下技术方案:一种完全自主可控快速时间频率同步装置,其改进之处在于:包括时统模块、主控模块、分配模块、显示模块和电源模块;时统模块包括授时电路单元、控制电路单元、时钟电路单元和电源电路单元,授时电路单元包括gps和北斗双模接收模块,时钟电路单元包括恒温晶振和与恒温晶振电连接的数模转换器,控制电路单元为fpga,gps和北斗双模接收模块输出的外参考1pps信号和恒温晶振输出的1pps信号均输入fpga,由fpga对上述两个1pps信号进行tdc时差测量得到时差数据,再将测量的时差数据进行滤波,最终得到调整电压并提供给数模转换器,此外fpga还输出5路秒脉冲信号,电源电路单元为时统模块内的各电路单元供电;主控模块与上述gps和北斗双模接收模块、恒温晶振、fpga和显示模块电连接,输出ntp授时和串口授时,分配模块与恒温晶振电连接并输出5路标频,电源模块为同步装置内的各模块供电。
8.进一步的,授时电路单元还包括与gps和北斗双模接收模块电连接的时统天线。
9.进一步的,时钟电路单元还包括晶振校准电路。
10.进一步的,恒温晶振通过10mhz频率信号分频出1pps信号。
11.进一步的,在没有外参考1pps信号时,fpga根据恒温晶振老化曲线和振荡器频偏自动调整控制恒温晶振。
12.进一步的,fpga利用快速进位链构建tdc,时差测量分辨率为250ps,由fpga的数字环路kalman滤波器进行滤波。
13.进一步的,主控模块为基于arm的嵌入式控制模块。
14.进一步的,在分配模块的时钟输入端增加10mhz晶体滤波器。
15.进一步的,电源模块输入220v交流电源,输出5v和12v直流电压,分别输出4a和2a电流。
16.一种时间频率同步方法,使用上述的同步装置,其改进之处在于,包括如下步骤:步骤1,设备自检初始化:同步装置开机启动后首先进行设备自检,待上电1min后开始对恒温晶振的压控值以及各个参数变量进行初始赋值,使得恒温晶振频率调整至中心频率;步骤2,粗调:读取秒脉冲时间关系和状态,然后在一定测试时间之后再次读取秒脉冲时间关系和状态,根据两次读取的时差和状态,依据频率驯服算法计算出需要调整dac的数值,写入dac数据寄存器中,然后在恒温晶振频率调整稳定时间之后,再次进行粗调操作,直到达到锁定门限,进入锁定状态;步骤3,锁定:锁定状态的门限设计为频率准确度1.0
×
10
‑
11
,当两个秒脉冲时间变化量在一个鉴相分辨率之内,即250ps时进入锁定状态,在进入锁定状态后,使用时统秒脉冲重新触发产生恒温晶振秒脉冲,使两个秒脉冲上升沿同步;步骤4,细调:进入锁定状态后,停止对恒温晶振频率粗调,开始对时差数值进行大周期的监测和调整;预先按照时间比例建立恒温晶振的老化率特性表,以天为周期进行dac转换器控
制数据和时间分析,得出恒温晶振压控电压的变化趋势和变化量,在无法跟踪北斗或gps时,据以逐步修正dac转换器输出的压控电压数据。
17.本发明的有益效果是:本发明所公开的同步装置,为多系统、多站点、多设备时间频率同步提供了强有力的支撑,在电工技术、工业自动化及智能控制等领域有着巨大的应用潜力,相对于传统的同步装置具有以下优点:(1)完全自主可控:使用100%全国产电子元器件;(2)捕获锁定快速:卫星捕获时间小于1分钟,锁定时间小于5分钟;(3)频率准确度高:可达1.0
×
10
‑
11
;(4)频率稳定度高:优于5
×
10e
‑
12
/day;(5)ntp授时精度高:小于10ms;(6)时间源模式多:支持单北斗、单gps、组合模式,支持保持模式;(7)授时容量大:5000次/秒。(8)操作简单,人机界面良好,具备bit告警功能;(9)设备量少,成本低,可靠性高。
18.本发明所公开的同步方法,与上述的同步装置相配合,具有高频率准确度和稳定度。
附图说明
19.图1是模拟锁相环的原理框图;图2是本发明实施例1所公开同步装置的原理框图;图3是本发明实施例1所公开同步装置中时统模块的示意框图;图4是本发明实施例1所公开同步方法(频率同步驯服)的流程示意图;图5是秒脉冲先后关系图。
具体实施方式
20.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图和实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
21.实施例1,本实施例公开了一种完全自主可控快速时间频率同步装置,采用北斗或gps驯服恒温晶振的方法,通过数字锁相环技术实时校正恒温晶振的长期稳定度,同时也滤除北斗或gps的随机相位抖动,最终实现北斗或gps的长期稳定度与恒温晶振的短期稳定度完美结合。同步装置主要功能是为其它设备提供准确的utc时间和频率基准,并最终实现多系统、多站点、多设备的时间和频率同步。同步装置采用数字锁相环驯服技术方案,原理如图2所示,包括时统模块、主控模块、分配模块、显示模块和电源模块。
22.时统模块是同步装置的核心模块,如图3所示,其主要由授时电路单元、控制电路单元、时钟电路单元和电源电路单元等部分组成,授时电路单元包括gps和北斗双模接收模块及与gps和北斗双模接收模块电连接的时统天线和外围电路等,gps和北斗双模接收模块接收北斗或gps卫星信号并输出外参考1pps信号;时钟电路单元包括恒温晶振和与恒温晶振电连接的数模转换器,恒温晶振通过10mhz频率信号分频出1pps信号,时钟电路单元还包括晶振校准电路,用来根据gps和北斗双模接收模块的秒脉冲对恒温晶振进行校准;控制电路单元为fpga,主要完成时统信息解析、tdc时差测量、数据滤波、时序产生以及与主控模块通信等功能。外参考1pps信号和恒温晶振输出的1pps信号均输入fpga,由fpga对上述两个
1pps信号进行tdc时差测量(即数字鉴相器)得到时差数据,再将测量的时差数据通过频率驯服算法进行滤波(即数字环路滤波器),最终计算得到调整电压并经数模转换器提供给恒温晶振(即压控振荡器),通过驯服环路驯服使得恒温晶振1pps信号与外参考1pps信号同步。此外fpga还输出5路秒脉冲信号;电源电路单元为时统模块内的各电路单元供电。
23.时统模块负责完成北斗和gps跟踪、输出时钟信号和秒脉冲信号等功能。在时统模块fpga中利用快速进位链构建时间数据转换器(tdc)对时统1pps信号和恒温晶振分频1pps信号进行时间间隔测量,时差测量分辨率为250ps,然后将时差数值送至fpga数字环路滤波器进行数据滤波,从而减小北斗或gps 的1pps随机抖动对驯服系统的影响。鉴于kalman滤波对噪声具有很好的滤除效果,本实施例数字环路滤波算法采用kalman滤波器,以改善系统的性能。
24.主控模块与上述gps和北斗双模接收模块、恒温晶振、fpga和显示模块电连接,输出ntp授时和串口授时。
25.主控模块采用基于arm的嵌入式控制模块,cpu使用freescale的i.mx6(cortex a9架构)四核处理器,主频1ghz。内存1ghz ddr3,本地存储4gb emmc,运行linux操作系统。主控模块主要功能包括:接收外部命令并进行解析,支持远程控制及状态查询;接收本地时间信息和状态信息并上报;ntp授时功能;网络监控功能;实现滤波算法;建立ocxo老化率特性表等。
26.ntp(network time protocol,网络时间协议)是由rfc
‑
1305定义的时间同步协议,用来在分布式时间服务器和客户端之间进行时间同步。
27.同步装置ntp授时功能实现方法是在主控模块中建立ntp服务器,以gps或北斗作为时间基准,通过运行gpsd、pps和ntpd等底层服务程序来实现。gps和北斗双模接收模块提供串口输出的nmea0183语句以及1pps信号,gpsd服务程序接收并不断解析gps和北斗双模接收模块传来的nmea0183语句。由于在解析语句的过程中需要耗费很长时间,并且容易被其它程序抢占运行时间,会产生delay(延迟)和jitter(波动),此时pps服务程序使用1pps 信号直接触发 cpu 的中断,让操作系统以高优先级处理语句,不会被其它程序影响,极大减少delay(延迟)和 jitter(波动)的产生,所以通过gpsd和pps底层服务程序能够获取极为精准的时间信息。最后使用ntpd服务程序进行网络授时,实际上ntpd是一个操作系统不断daemon进程,目的用于校正本地系统与internet标准时钟源之间的时间,最终实现ntp网络授时过程。
28.分配模块与恒温晶振电连接并输出5路标频。同步装置分配模块主要将被驯服的本地标频和1pps信号分别分配成5路输出,并且满足系统要求。为了进一步优化同步装置输出频率的信号质量,在分配模块时钟输入端增加10mhz晶体滤波器,可以极大提高输出频率近端频谱纯度。
29.显示模块主要用于同步装置本控参数设置及状态显示,设计显示模块采用湖南迪文科技有限公司生产的3.5寸电容工控触摸屏dmt32240m035
‑
03w;电源模块主要功能为给同步装置各模块提供电源,电源模块输入为220v交流电源,通过电源模块进行ac/dc转换,电源模块采用上海责允电子科技有限公司的zry系列线性电源模块zry50
‑
220e0512,输出电压为12v,输出电流为2a;输出电压为5v,输出电流为4a。
30.当输入参考信号不可用时,同步装置自动切换到保持模式,根据恒温晶振老化曲
线、振荡器频偏等运行特性自动调整控制恒温晶振,继续保持高精度的时间和频率信号输出。
31.本同步装置可输出5路频率信号、5路1pps信号、1路ntp授时时间信息、1路串口时间信息,采用全国产电子元器件、集成化、模块化、小型化的设计思路,工作稳定可靠,结构设计考虑抗震性,可用于船载和车载,也可作为固定站使用。
32.同步装置的主要创新点之一为采用100%全国产电子元器件开展设计,具备完全自主可控能力,这在国际半导体领域技术壁垒高耸尤其是中美“芯片之争”的大背景下,具有特殊的积极意义。同步装置主要核心国产电子元器件使用情况如下:恒温晶振:hj180北京泰福特电子科技有限公司;fpga:jfm7k325t上海复旦微电子集团股份有限公司;gps和北斗双模接收模块:star
‑
oem
‑
4050北京中星恒通科技有限公司,模块使用100%国产电子元器件,支持接收北斗三号能力;放大器:he315中国电子科技集团公司第十三研究所;串口芯片:sm3232深圳市国微电子股份有限公司;电源芯片:sm74401深圳市国微电子股份有限公司。
33.本实施例还公开了一种时间频率同步方法(频率同步驯服),使用上述的同步装置,如图4所示,包括如下步骤:步骤1,设备自检初始化:同步装置开机启动后首先进行设备自检,由于初始上电,恒温晶振的温度尚未稳定,其输出的频率准确度和频率温度偏移较大,如果此时即对恒温晶振进行调控并无实际意义,待恒温晶振上电1min后其恒温控制基本达到正常状态,晶振输出频率趋于稳定,随即开始对恒温晶振的压控值以及各个参数变量进行初始赋值,使得恒温晶振频率能够尽快调整至中心频率;步骤2,粗调:粗调的目的是对恒温晶振进行快速调整,使得恒温晶振输出的秒信号迅速与时统秒信号同步。在自检初始化时,恒温晶振秒脉冲是通过触发时统秒脉冲信号上升沿产生,所以最初两个秒信号前沿时差不大,但由于恒温晶振频率相较时统频率不完全准确,因此恒温晶振秒脉冲信号会相对时统秒脉冲信号产生漂移。同步装置以恒温晶振秒脉冲信号为基准,当恒温晶振秒脉冲在时统秒脉冲时间轴前方时,定义为超前;而当恒温晶振秒脉冲在时统秒脉冲时间轴后方时,定义为滞后。秒脉冲先后关系如图5所示。
34.粗调的调制过程是在开始调整读取秒脉冲时间关系和状态,即读取秒脉冲时差以及超前滞后状态,然后在一定测试时间之后再次读取秒脉冲时间关系和状态,根据两次读取的时差和状态,依据同步装置频率驯服算法计算出需要调整dac的数值,写入dac数据寄存器中,然后在恒温晶振频率调整稳定时间之后,再次进行粗调操作,直到达到锁定门限,进入锁定状态。
35.步骤3,锁定:锁定状态的门限设计为频率准确度1.0
×
10
‑
11
,当两个秒脉冲时间变化量在一个鉴相分辨率之内,即250ps时,同步装置进入锁定状态。此时,时统秒脉冲和恒温晶振秒脉冲基本同步,相对漂移量很小,但是由于前期在鉴相过程中,两个秒脉冲在不断相对漂移,所以在进入锁定状态后,两个秒脉冲上升沿时间差需要消除。设计在进入锁定状态后,使用时统秒脉冲重新触发产生恒温晶振秒脉冲,使两个秒脉冲上升沿同步,实现时钟频率和相位
的严格同步。
36.步骤4,细调:同步装置进入锁定状态后开始细调操作,细调的目的是持续跟踪外参考系统,进一步提升系统频率准确度。同步装置进入锁定状态后,停止对恒温晶振频率粗调,开始对时差数值进行大周期的监测和调整,随着运行时间的推移,装置频率准确度指标也逐步加以提升。
37.同步装置偶尔会因gps和北斗双模接收模块无效,造成频率同步驯服流程无法执行,使得恒温晶振输出频率无法跟踪北斗或gps。在出现该种问题时,装置将进入“保持”状态,预先按照时间比例建立恒温晶振的老化率特性表,以天为周期进行dac转换器控制数据/时间分析,可以简单而快速地得出恒温晶振压控电压的变化趋势和变化量,然后在保持工作状态中逐步修正dac变换器输出的压控电压数据,达到装置保持一定同步能力的目的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1