一种基于相对硬件延迟校准的实时UTC(k)时间比对方法
一种基于相对硬件延迟校准的实时utc(k)时间比对方法
技术领域
1.本发明属于卫星导航技术领域,尤其涉及一种基于相对硬件延迟校准的实时utc(k)时间比对方法。
背景技术:
2.时间属于七大基本物理量之一,对于日常生活、科学研究以及工程建设等领域具有十分重要的意义。为了确保时间参考的一致性,国际计量局(bureau international des poids et mesures,bipm)综合全球80余个时间实验室实时维持的本地时间(utc(k)),最终生成世界协调时(coordinated universal time,utc)。因此,精确的utc(k)时间比对结果是维持utc的前提。
3.传统的高精度时间传递包括光纤时间传递以及卫星双向时间传递等方法,存在着成本高,需要中继节点等缺点。近年来,低成本、高精度的全球导航卫星系统(global navigation satellite system,gnss)时间传递方法成为时频领域的研究热点。1980年,allan和weiss率先提出了基于全球定位系统(global positioning system,gps)伪距观测值的共视法(common view,cv)时间传递,并成功应用于bipm时间链路的时间比对。然而,共视法存在时间传递性能受基线距离限制的缺点。随着国际gnss服务组织(international gnss service,igs)产品时效性以及精度的不断完善,全视法(all-in-view,av)成为性能优于共视法的时间传递手段。2006年9月,国际咨询频率委员会(consultative committee on time and frequency,cctf)在第17届cctf会议上提出了采用全视法时间传递取代utc时间比对链路中的共视法时间传递。鉴于高精度载波相位观测值的优势,该会议同时提出了开展基于精密单点定位(precise point positioning,ppp)时间传递方法在时间链路中比对的研究。作为性能最优的gnss时间传递方法,ppp时间传递精度依赖于精确的误差改正,尤其是卫星钟与轨道误差项。当采用igs事后精密产品时,ppp时间传递的精度(standard deviation,std)能够达到0.1ns。目前,约有60%的gnss时频链路采用了ppp时间传递方法。此外,为了满足亚纳秒级的实时时间传递需求,北京航空航天大学基于中国区域站以及全球igs站的跟踪站网,建立了北斗广域高精度时间服务(wide-area precise timing,wpt)原型系统,能够提供高精度的实时差分改正数,实现亚纳秒级精度的实时时间服务。
4.在utc(k)的时间比对中,还需要考虑时间比对链路中硬件延迟误差造成的影响。硬件延迟误差在短时间内较为稳定,不会对时间传递结果的std值造成影响,但会产生系统性偏差。国家授时中心还对利用模拟器进行授时接收机校准的方法进行了研究,提出了基于钟驾驭模式的接收机绝对校准方法,指出了不同架构授时接收机校准方法不同,并分别对novatel和septentrio两款不同类型接收机进行校准,单频校准不确定度皆优于1.5ns,双频校准不确定度优于4.5ns。美国海军研究室(united states naval research laboratory,nrl)提出了一种使用gps模拟器的绝对延迟校准方法,该方法首先通过共钟的方式对模拟器和接收机进行时间同步,然后解算模拟器输出的观测量和接收机输出的观测
量的钟差来求解接收机硬件延迟,校准不确定度对于单个频点为1.1ns。国际计量局提出了一种差分校准方法,该方法将待校准接收机和一台已校准接收机进行共钟共天线操作,然后比较观测值来求出两台接收机硬件延迟的差,从而得到待校准接收机的硬件延迟。
5.目前为止,接收机的绝对硬件延迟仍然是时频应用中的难题之一,特别是对于ppp时间传递,1ns的硬件延迟不确定度制约了其亚纳秒时间传递的实际应用性能。在ppp时间比对中,时间比对结果是通过测站接收机钟差作单差获得。因此,影响ppp时间传递结果的是测站间的相对硬件延迟部分。为解决该问题,本发明在wpt技术背景下,提出了一种基于相对硬件延迟校准的实时utc(k)时间比对方法。该方法能够消除硬件延迟对ppp时间比对的影响,进一步提升ppp时间传递在utc(k)时间比对的应用性能。
技术实现要素:
6.由于现有的绝对硬件延迟校准精度仅为ns量级,其不确定度制约了亚纳秒级时间传递技术的实时应用,尤其是对于utc(k)的时间比对。为了进一步提升ppp时间传递技术在utc(k)时间传递的应用性能,本发明在wpt的技术背景下,提出了一种基于相对硬件延迟校准的实时utc(k)时间比对方法。本发明的具体技术方案如下:
7.一种基于相对硬件延迟校准的实时utc(k)时间比对方法,包括以下步骤:
8.s1:采用接收机记录的观测数据和事后精密星历,根据ppp算法获取接收机r本地钟clockr与事后钟差产品基准clockref
post
的差异,即接收机钟差dtr为:
9.dtr=clock
r-clockref
post
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
10.s2:由于接收机、天线及线缆硬件存在延迟,相较于代号为k的时间实验室产生并维持的标准时间utc(k),接收机r本地钟clockr存在硬件延迟偏差δr,即
11.clockr=utc(k)+δrꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
12.带入式(1)得到:
13.dtr=utc(k)+δ
r-clockref
post
ꢀꢀꢀꢀ
(3)
14.s3:两台接收机r1和r2接入代号为k的时间实验室的同一时间频率源,则基于ppp解算,得到两台接收机的钟差dt
r1
和dt
r2
分别为:
[0015][0016]
其中,δ
r1
和δ
r2
分别为接收机r1和r2的时间信息相较于utc(k)的硬件延迟偏差;
[0017]
二者作差
[0018]
dt
r1-dt
r2
=utc(k)+δ
r1-clockref
post-(utc(k)+δ
r2-clockref
post
)
[0019]
ꢀꢀꢀꢀꢀꢀꢀꢀ
=δ
r1-δ
r2
ꢀꢀ
(5)
[0020][0021]
式(5)即两台接收机、天线以及线缆引起的硬件延迟偏差的相对差值;
[0022]
s4:将经过步骤s1-步骤s3进行硬件延迟标校后的两台接收机、天线以及线缆分别安置于时间实验室k1与时间实验室k2,并将接收机r1接入时间实验室k1的时间频率源,接收机r2接入时间实验室k2的时间频率源;以tcp/ip通信协议将附加标准时间信息的gnss实时观测数据流推送至时间监测服务器;
[0023]
s5:时间监测服务器根据接收机回传的gnss观测信息及实时差分改正数,并进行
实时ppp处理,获取相应钟差基准下的接收机钟差dt
utc(k)
,dt
utc(k)
表征的是utc(k)与wpt服务平台参考时间基准t
ref
的差异,还包含时间比对链路中硬件部分引起的时延偏差δk,即dt
utc(k)
为:
[0024]
dt
utc(k)
=utc(k)-t
ref
+δrꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0025]
因此,对于分别位于时间实验室k1和时间实验室k2的接收机r1和接收机r2,其接收机钟差分别为:
[0026][0027]
其中,utc(k1)和utc(k2)分别表示由时间实验室k1、时间实验室k2所产生并维持的标准时间;
[0028]
两接收机钟差作差,能够消除参考时间t
ref
,且保留两条接收机链路间的相对时延偏差δ
k1-δ
k2
,即
[0029]
dt
utc(k1)-dt
utc(k2)
=utc(k1)-utc(k2)+δ
k1-δ
k2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0030]
utc(k1)-utc(k2)=(dt
utc(k1)-dt
utc(k2)
)-(δ
k1-δ
k2
)
ꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0031]
基于此,实现顾及硬件延迟标校的utc(k1)和utc(k2)之间的实时比对。
[0032]
进一步地,所述步骤s5中,时间监测服务器按照既定格式对wpt服务平台播发的广域差分产品进行解码,获取实时差分改正数其中,分别为卫星在三个方向上的轨道差分改正数;为卫星钟差改正数;
[0033]
s5-1:由于轨道差分改正数对应星固坐标系,需要转换为在地固系下的改正向量[dx dy dz]
t
:
[0034][0035]
式中,为坐标转换矩阵,其中,为卫星在径向的单位列向量、为卫星沿着速度方向的单位列向量,为卫星与速度方向和坐标方向均垂直方向的单位列向量,分别表示为:
[0036][0037]
式中,为卫星在星固系下的坐标向量,为卫星的速度向量,均由广播星历确定,
×
表示向量的内积;
[0038]
s5-2:根据广播星历计算出相应时刻各卫星在地固系下的坐标其中,xn,yn,zn,分别为第n颗卫星在地固系下在三个方向上的坐标及钟差;再根据式(10)中还原的差分改正数恢复精密卫星轨道及钟差信息,得到经过改正后各卫星坐标及钟差:
[0039][0040]
其中,xs,ys,zs,dts分别为经过实时差分改正数修正后卫星在地固系下三个方向上的坐标及钟差;
[0041]
s5-3:将恢复的精密卫星钟差信息代入基于无电离层组合的gnss观测方程,进行实时ppp算法处理:
[0042][0043]
其中,p为无电离层组合伪距观测值,为无电离层组合相位观测值,ρ为卫星到接收机端的几何距离,由式(12)求得改正后的卫星坐标及接收机在地固系下三个方向上的坐标x,y,z确定,表示为c为光速,dts为由式(12)获得的卫星钟差,dt
utc(k)
为接收机钟差,t为对流层延迟,λ为载波波长,n为整周模糊度,ε
p
和分别表示在伪距观测和相位观测中观测噪声、多路径效应和其他未被模型化的误差;
[0044]
因此,在进行ppp解算时,待估的未知参数为接收机的位置参数x,y,z,接收机钟差,对流层延迟t及模糊度参数n;其中,接收机钟差可作为白噪声进行估计;对流层延迟由干延迟和湿延迟组成,干延迟由模型确定,湿延迟作为随机游走噪声特性的参数进行估计。
[0045]
本发明的有益效果在于:
[0046]
1.本发明具有良好的可用性:顾及了硬件延迟对ppp时间传递的影响,提出了一种差分相对硬件延迟的校准方法,消除了硬件延迟在基于ppp方法的utc(k)时间比对的影响。
[0047]
2.本发明具有良好的实时性:基于wpt服务平台,接收机进行实时接收机状态估计,能实时反映出实验室utc(k)的比对结果。
[0048]
3.本发明具有良好的灵活性:不仅适用于两台时频终端的多导航系统ppp时间传递应用,还可在测站网中选取一台接收机硬件延迟作为基准,进而实现多台时频终端相对硬件延迟的统一标校。
附图说明
[0049]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,通过参考附图会更加清楚的理解本发明的特征和优点,附图是示意性的而不应理解为对本发明进行任何限制,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,可以根据这些附图获得其他的附图。其中:
[0050]
图1是接收机间相对硬件延迟标校流程图;
[0051]
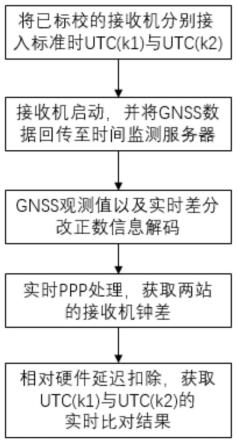
图2是经过硬件延迟标校后接收机进行实时utc(k)比对的流程图。
具体实施方式
[0052]
为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本发明的实施例及实施例中的特征可以相互组合。
[0053]
在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
[0054]
如图1所示,本发明基于相对硬件延迟标校的实时utc(k)比对方法,将待校准的接收机以及线缆接入同一时间频率源进行事后ppp解算,获取相对硬件延迟,随后将已校准的接收机分别安置于不同的时间实验室,通过wpt时间服务平台获取实时差分改正数,结合gnss观测值,通过实时ppp处理获取两站接收机钟差,进而扣除相对硬件延迟标校,得到了实时utc(k)时间比对结果,消除了硬件延迟在基于ppp方法的utc(k)时间比对的影响,极大提高了实时utc(k)时间比对的精度。
[0055]
具体地,一种基于相对硬件延迟校准的实时utc(k)时间比对方法,包括以下步骤:
[0056]
s1:采用接收机记录的观测数据和事后精密星历,根据ppp算法获取接收机r本地钟clockr与事后钟差产品基准clockref
post
的差异,即接收机钟差dtr为:
[0057]
dtr=clock
r-clockref
post
ꢀꢀꢀꢀ
(1)
[0058]
s2:由于接收机、天线及线缆硬件存在延迟,相较于代号为k的时间实验室产生并维持的标准时间utc(k),接收机r本地钟clockr存在硬件延迟偏差δr,即
[0059]
clockr=utc(k)+δrꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0060]
带入式(1)得到:
[0061]
dtr=utc(k)+δ
r-clockref
post
ꢀꢀꢀꢀ
(3)
[0062]
s3:两台接收机r1和r2接入代号为k的时间实验室的同一时间频率源,则基于ppp解算,得到两台接收机的钟差dt
r1
和dt
r2
分别为:
[0063][0064]
其中,δ
r1
和δ
r2
分别为接收机r1和r2的时间信息相较于utc(k)的硬件延迟偏差;
[0065]
二者作差
[0066]
dt
r1-dt
r2
=utc(k)+δ
r1-clockref
post-(utc(k)+δ
r2-clockref
post
)
[0067]
ꢀꢀꢀꢀꢀꢀꢀꢀ
=δ
r1-δ
r2
ꢀꢀ
(5)
[0068][0069]
式(5)即两台接收机、天线以及线缆引起的硬件延迟偏差的相对差值;
[0070]
s4:将经过步骤s1-步骤s3进行硬件延迟标校后的两台接收机、天线以及线缆分别安置于时间实验室k1与时间实验室k2,并将接收机r1接入时间实验室k1的时间频率源,接收机r2接入时间实验室k2的时间频率源;以tcp/ip通信协议将附加标准时间信息的gnss实时观测数据流推送至时间监测服务器;
[0071]
s5:时间监测服务器根据接收机回传的gnss观测信息及实时差分改正数,并进行实时ppp处理,获取相应钟差基准下的接收机钟差dt
utc(k)
,dt
utc(k)
表征的是utc(k)与wpt服务平台参考时间基准t
ref
的差异,还包含时间比对链路中硬件部分引起的时延偏差δk,即dt
utc(k)
为:
[0072]
dt
utc(k)
=utc(k)-t
ref
+δrꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0073]
因此,对于分别位于时间实验室k1和时间实验室k2的接收机r1和接收机r2,其接收机钟差分别为:
[0074][0075]
其中,utc(k1)和utc(k2)分别表示由时间实验室k1、时间实验室k2所产生并维持的标准时间;
[0076]
两接收机钟差作差,能够消除参考时间t
ref
,且保留两条接收机链路间的相对时延偏差δ
k1-δ
k2
,即
[0077]
dt
utc(k1)-dt
utc(k2)
=utc(k1)-utc(k2)+δ
k1-δ
k2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0078]
utc(k1)-utc(k2)=(dt
utc(k1)-dt
utc(k2)
)-(δ
k1-δ
k2
)
ꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0079]
基于此,实现顾及硬件延迟标校的utc(k1)和utc(k2)之间的实时比对。
[0080]
在一些实施方式中,步骤s5中,时间监测服务器按照既定格式对wpt服务平台播发的广域差分产品进行解码,获取实时差分改正数其中,分别为卫星在三个方向上的轨道差分改正数;为卫星钟差改正数;
[0081]
s5-1:由于轨道差分改正数对应星固坐标系,需要转换为在地固系下的改正向量[dx dy dz]
t
:
[0082][0083]
式中,为坐标转换矩阵,其中,为卫星在径向的单位列向量、为卫星沿着速度方向的单位列向量,为卫星与速度方向和坐标方向均垂直方向的单位列向量,分别表示为:
[0084][0085]
式中,为卫星在星固系下的坐标向量,为卫星的速度向量,均由广播星历确定,
×
表示向量的内积;
[0086]
s5-2:根据广播星历计算出相应时刻各卫星在地固系下的坐标其中,xn,yn,zn,分别为第n颗卫星在地固系下在三个方向上的坐标及钟差;再根据式(10)中还原的差分改正数恢复精密卫星轨道及钟差信息,得到经过改正后各卫星坐标及钟差:
[0087][0088]
其中,xs,ys,zs,dts分别为经过实时差分改正数修正后卫星在地固系下三个方向上的坐标及钟差;
[0089]
s5-3:将恢复的精密卫星钟差信息代入基于无电离层组合的gnss观测方程,进行实时ppp算法处理:
[0090][0091]
其中,p为无电离层组合伪距观测值,为无电离层组合相位观测值,ρ为卫星到接收机端的几何距离,由式(12)求得改正后的卫星坐标及接收机在地固系下三个方向上的坐标x,y,z确定,表示为c为光速,dts为由式(12)获得的卫星钟差,dt
utc(k)
为接收机钟差,t为对流层延迟,λ为载波波长,n为整周模糊度,ε
p
和分别表示在伪距观测和相位观测中观测噪声、多路径效应和其他未被模型化的误差;
[0092]
因此,在进行ppp解算时,待估的未知参数为接收机的位置参数x,y,z,接收机钟差,对流层延迟t及模糊度参数n;其中,接收机钟差可作为白噪声进行估计;对流层延迟由干延迟和湿延迟组成,干延迟由模型确定,湿延迟作为随机游走噪声特性的参数进行估计。
[0093]
为了方便理解本发明的上述技术方案,以下通过具体实施例对本发明的上述技术方案进行详细说明。
[0094]
实施例1
[0095]
选取外接原子钟的守时实验室,取两台接收机接入同一时间频率源,通过事后ppp处理,获取两台接收机钟差分别为dt
k1
和dt
k2
。由于接收机钟差中本地钟包含了因接收机以及线缆硬件延迟的存在而产生的硬件延迟偏差δ
k1
和δ
k2
,此两台接收机钟差之差dt
k1-dt
k2
即为两台接收机及线缆引起的相对硬件延迟。
[0096]
将上述两台接收机分别安置于外接原子钟的时间实验室a与b,基于wpt时间服务平台,对时间实验室a与b相应钟差基准下的接收机钟差进行实时估计,此时两台接收机钟差的差异dt
utc(k1)-dt
utc(k2)
即为两个外接utc(k)时间的差异与之前确定的两台接收机及线缆引起的相对硬件延迟之和,由此,扣除相对硬件延迟,获取两站之间的实时utc(k)时间比对结果。
[0097]
综上,本发明针对以往实时utc(k)之间的时间比对没有顾及接收机及线缆引起的硬件延迟偏差的问题,提出了一种基于相对硬件延迟标校的实时utc(k)之间的时间比对方法,能够对时间链路中的硬件延迟进行相对校准,实时反映出守时实验室标准时间的差异。在保证精确度的条件下极大地提升了系统的可用性,同时还可以准确实时地反映两测站实时utc(k)比对结果,在时间同步以及高精度定位中有着广阔的应用前景。
[0098]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1