自移动设备及其工作方法与流程
1.本发明涉及一种自移动设备,还涉及一种自移动设备的工作方法。
背景技术:
2.随着科技的发展,自动工作系统越来越频繁的出现在人们的日常生活中,帮助人们处理一些重复繁琐的工作。自动工作系统中的自移动设备能在一定区域内运行,以完成相关任务。一般情况下,自动工作系统可以在没有人为操作控制的状态下工作,割草机在修正草坪的过程中,一般可以通过传感器来实现对障碍物的检测。
3.一般情况下,机器可以利用安装在其上的超声波传感器或浮动盖等来对行进路径中所遇到的障碍物进行检测。在检测障碍物的过程中,通过检测超声波传感器中的信号变化或浮动盖等设备的状态变化以识别障碍物。然而,上述检测方式均需要在机器上额外安装其他器件,比较繁琐,且需要支付额外的用于安装这些器件的费用。
技术实现要素:
4.为克服现有技术的缺陷,本发明所要解决的问题是提供一种具有较高障碍物识别精度的自移动设备。
5.本发明解决现有技术问题所采用的技术方案是:一种自移动设备,所述自移动设备在界限限定的工作区域内行走并工作,所述自移动设备包括:
6.壳体;
7.行走机构,支撑并驱动所述壳体行走,所述行走机构包括驱动轮;
8.至少一个电机,安装于所述壳体,用以驱动所述驱动轮转动;
9.控制装置,所述控制装置中预设有第一扭矩阈值和第二扭矩阈值,所述至少一个电机由停止状态启动至运行状态的过程中,所述控制装置控制所述至少一个电机的最大实际输出扭矩与所述第一扭矩阈值的差异在预定范围内,所述电机处于运行状态时,所述控制装置控制所述至少一个电机的实际输出扭矩最多增大至所述第二扭矩阈值,其中所述第一扭矩阈值小于等于所述电机的最大输出扭矩,所述第二扭矩阈值小于所述第一扭矩阈值,所述自移动设备还包括:轮监测模块,所述轮监测模块用于监测所述驱动轮的转动情况,所述电机处于运行状态时,当所述轮监测模块监测到所述驱动轮停止转动时,确定所述自移动设备发生碰撞。
10.在本申请的一个实施例中,所述轮监测模块包括:电机转速监测单元,所述电机转速监测单元用于监测所述电机的转动情况,所述电机处于运行状态时,当所述电机转速监测单元监测到所述电机转速大致为零时,确定所述自移动设备发生碰撞。
11.在本申请的一个实施例中,所述轮监测模块包括:电机扭矩监测单元,所述电机扭矩监测单元用于监测所述电机的实际输出扭矩,所述电机处于运行状态时,当所述电机扭矩监测单元监测到所述电机的实际输出扭矩大于或等于第四扭矩阈值时,确定所述自移动设备发生碰撞。
12.在本申请的一个实施例中,所述轮监测模块包括:电流监测单元,所述电流监测单元用于监测所述电机中的电流,所述电机处于运行状态时,当所述电流监测单元监测到所述电机中的电流大于或等于预设电流阈值时,确定所述自移动设备发生碰撞。
13.在本申请的一个实施例中,所述自移动设备包括:至少两个电机,所述至少两个电机分别驱动所述至少两个驱动轮转动,所述控制装置独立的控制所述至少两个电机。
14.在本申请的一个实施例中,所述控制装置还预设有第三扭矩阈值,所述自移动设备在转向的运行状态中,所述控制装置控制所述至少一个电机的实际输出扭矩最多增大至所述第三扭矩阈值,所述第三扭矩阈值小于或等于所述第一扭矩阈值,且所述第三扭矩阈值大于所述第二扭矩阈值。
15.在本申请的一个实施例中,所述自移动设备还包括:角度监测装置,所述角度监测装置用于监测所述自移动设备在转向的运动状态中角度变化,当所述角度监测装置监测到所述自移动设备在预设时间段内角度大致不变时,确定所述自移动设备发生碰撞。
16.在本申请的一个实施例中,所述角度监测装置为惯性测量单元。
17.在本申请的一个实施例中,所述第三扭矩阈值可调。
18.在本申请的一个实施例中,所述自动行走设备为自动割草机,还包括:切割机构,所述切割机构安装在所述壳体上,用于执行预定工作。
19.本发明实施例中还提供了一种自移动设备的工作方法,所述自移动设备包括:至少一个电机、行走机构,所述行走机构包括驱动轮,所述至少一个电机用于驱动所述驱动轮转动,所述自移动设备中预设有第一扭矩阈值和第二扭矩阈值,所述至少一个电机由停止状态启动至运行状态的过程中,控制所述电机的最大实际输出扭矩与第一扭矩阈值的差异在预定范围内,所述电机处于运行状态时,控制所述电机的实际输出扭矩最多增大至所述第二扭矩阈值,其中所述第一扭矩阈值小于等于所述电机的最大输出扭矩,所述第二扭矩阈值小于所述第一扭矩阈值,
20.当所述电机处于运行状态时,监测所述驱动轮的转动情况;
21.若监测到所述驱动轮停止转动时,确定所述自移动设备发生碰撞。
22.在本申请的一个实施例中,若监测到所述驱动轮停止转动时,确定所述自移动设备发生碰撞,包括:当监测到所述电机转速大致为零时,确定所述自移动设备发生碰撞。
23.在本申请的一个实施例中,若监测到所述驱动轮停止转动时,确定所述自移动设备发生碰撞,包括:当监测到所述电机的实际输出扭矩大于或等于第四扭矩阈值时,确定所述自移动设备发生碰撞。
24.在本申请的一个实施例中,若监测到所述驱动轮停止转动时,确定所述自移动设备发生碰撞,包括:当监测到所述电机中的电流大于或等于预设电流阈值时,确定所述自移动设备发生碰撞。
25.在本申请的一个实施例中,所述自移动设备可以包括但不限于:至少两个电机,所述至少两个电机分别驱动所述至少两个驱动轮转动,所述控制装置独立的控制所述至少两个电机。
26.在本申请的一个实施例中,所述自移动设备还预设有第三扭矩阈值,所述自移动设备在转向的运行状态中,所述控制装置控制所述至少一个电机的实际输出扭矩最多增大至所述第三扭矩阈值,所述第三扭矩阈值小于或等于所述第一扭矩阈值,且所述第三扭矩
阈值大于所述第二扭矩阈值。
27.在本申请的一个实施例中,若监测到所述驱动轮停止转动时,确定所述自移动设备发生碰撞,包括:当监测到所述自移动设备在预设时间段内角度大致不变时,确定所述自移动设备发生碰撞。
28.在本申请的一个实施例中,所述自移动设备中设置有惯性测量单元。
29.在本申请的一个实施例中,所述第三扭矩阈值可调。
30.在本申请的一个实施例中,所述自动行走设备可以为自动割草机。
31.与现有技术相比,本发明的有益效果是:可以通过检测驱动轮的转动情况来确定割草机是否发生碰撞,使用本申请提出的方式识别障碍物时,识别精度较高,无需在割草机上安装新的器件或者简化了在割草机上安装的器件,节省成本。
附图说明
32.以上所述的本发明的目的、技术方案以及有益效果可以通过下面附图实现:
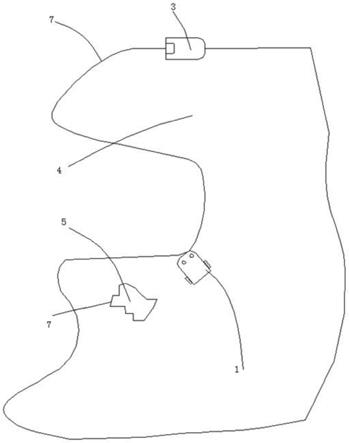
33.图1是本发明实施例的自动工作系统示意图;
34.图2是本发明实施例的自动割草机的功能模块示意图;
35.图3是本发明实施例的自动割草机的结构示意图;
36.图4是本发明实施例的自动割草机不同工作状态时的扭矩变化示意图;
37.图5是本发明实施例的自动割草机不同工作状态时的电流变化示意图;
38.图6是本发明实施例的自动割草机不同工作状态时的电机转速变化示意图。
具体实施方式
39.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
40.本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。并且,本文所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
41.如图1所示为本具体实施方式的自动工作系统,可以包括:自移动设备1、界限7、基站3。其中,工作区域4内还存在障碍物5,自移动设备1在界限7所限定的工作区域4内行走并工作,基站3可以用于供自移动设备能源不足时返回补充能量。
42.自移动设备1可以是自动割草机、扫地机器人、自动扫雪机等适合无人值守的设备,它们自动行走于工作区域的表面,进行割草、吸尘或者扫雪工作。当然,自移动设备不限于自动割草机、扫地机器人、自动扫雪机,也可以为其它适合无人值守的设备,本申请对此不作限定。
43.在下面的具体实施例中,以自动工作系统为自动割草机系统,即,自移动设备1为自动割草机20为例进行详细说明。如图1所示,界限7限定自动割草机20的工作区域。如图2至图3所示,自动割草机20包括壳体27,还可以包括行走机构21、至少一个电机23、切割机构22、控制装置24、能量模块25。控制装置24连接并控制行走机构21、切割机构22,以实现自动
割草机20的自动行走及工作。具体的,行走机构21可以包括驱动轮211和辅助支撑壳体的辅助轮212。至少一个电机可以包括:用于驱动行走机构21的电机以及用于驱动切割机构22的电机。在本申请下面的实施例中,为了方便描述,至少一个电机可以为用于驱动行走机构的行走电机。在一个实施例中,割草机中可以设置有两个用于驱动行走机构21的行走电机,控制装置可以独立的控制这两个行走电机,即,割草机右驱动轮和左驱动轮各自配接一个行走电机,以实现差速输出控制转向;在另一个实施例中,割草机中也可以仅设置有一个用于驱动行走机构21的行走电机,即同一个行走电机通过不同的传动装置驱动右驱动轮和左驱动轮,以实现差速输出控制转向。切割机构22可以包括:切割刀片221,由切割电机222驱动工作。能量模块25固定或可拆卸的安装于壳体,可以为电池包等。
44.如申请号为pct/cn2018/074177的申请文件所述,在现有的应用场景中,可以在控制装置中预设与行走电机相关的两个扭矩阈值,包括:第一扭矩阈值和第二扭矩阈值。如图4所示,行走电机由停止状态启动至运行状态的过程中,控制装置可以将至少一个电机的最大实际输出扭矩与第一扭矩阈值的差异控制在预定范围内;当电机处于运行状态时,控制装置可以控制至少一个电机的实际输出扭矩最多增大至第二扭矩阈值。其中,第一扭矩阈值小于等于电机的最大输出扭矩,第二扭矩阈值小于第一扭矩阈值。第二扭矩阈值的设置原则为:保证割草机正常工作时驱动轮能够克服草丛所造成的阻力,同时又保证遇到障碍时不能克服障碍所造成的阻力,从而割草机在行走过程中发生碰撞时,不会由于电机扭矩过大导致驱动轮转动产生磨草现象。
45.在本申请的一个实施例中,如图2所示,自动割草机20中还可以包括:轮监测模块26,轮监测模块26可以用于监测驱动轮的转动情况,电机处于运行状态时,当轮监测模块监测到驱动轮停止转动,可以确定割草机遇到障碍物200,且发生碰撞。由于在割草机处于运行状态的过程中,驱动驱动轮转动的电机实际输出扭矩最多增大至第二扭矩阈值,该第二扭矩阈值使得割草机遇到障碍时无法克服障碍所造成的阻力,从而驱动轮停止转动,可以通过检测驱动轮是否停止转动,判断割草机是否发生碰撞。
46.在本申请的实施例中,轮监测模块26可以由软件实现,也可以由硬件实现,或者也可以由软件与硬件组合实现。
47.在本申请的一个实施例中,轮监测模块26可以由程序算法实现,通过该程序算法可以实现对割草机驱动轮转动情况的监测,当通过该程序算法监测到驱动轮停止转动时,可以确定割草机发生碰撞。
48.在本申请的另一个实施例中,轮监测模块26可以为电子器件的硬件存在形式。在一个实施例中,轮监测模块26可以是轮速监测传感器。轮速监测传感器可以用于监测驱动轮的转速,当监测到驱动轮的转速大致为零时(转速大致为零可以指的是驱动轮转速为零或者接近于零的情况),可以确定割草机发生碰撞。
49.在本申请的一个实施例中,轮监测模块26可以包括:电机转速监测单元,电机转速监测单元可以用于监测行走电机的转动情况。当行走电机处于运行状态时,当电机转速监测单元监测到电机转速大致为零时,可以确定割草机发生碰撞。在电机为无刷或有刷电机的情况下,可以通过电机转速监测单元监测电机转速的变化来确定割草机的工作状态。当监测到电机在正常工作的情况下,产生如图6所示的电机转速变化为0情况时,可以确定割草机发生碰撞。在一个实施例中,电机转速监测单元可以为霍尔传感器,此时可以通过霍尔
传感器检测电机中的电机转速,根据电机转速的变化情况以确定割草机是否发生碰撞。具体的,当霍尔传感器确定的电机转速产生如图6所示的变化情况时,可以确定割草机发生碰撞。在另一个实施例中,可以通过检测电机的反电动势来检测电机中转子位置,根据转子位置的变化情况判断割草机是否发生碰撞,例如:当无法检测到转子位置时可以判断转子受阻不能旋转,从而判断割草机发生碰撞;或者也可以根据反电动势计算得到电机转速,根据电机转速的变化情况以确定割草机是否发生碰撞。
50.在本申请的另一个实施例中,轮监测模块可以包括:电机扭矩监测单元,电机扭矩监测单元可以用于监测电机的实际输出扭矩,电机处于运行状态时,当电机扭矩监测单元监测到电机的实际输出扭矩大于或等于第四扭矩阈值时,可以确定割草机发生碰撞。该第四扭矩阈值可以是小于或等于第二扭矩阈值的某个扭矩阈值,也可以是由制造商预先设定的值,或者也可以是用户根据工况在使用前提前自行设定的值。如图4所示的场景中,第四扭矩阈值设置为小于第二扭矩阈值的某个值。当割草机发生碰撞时,电机输出扭矩会突然增大,并可能在短时间内增大至超过第四扭矩阈值,也可能在短时间内超过第二扭矩阈值。如图4所示,当监测到电机的输出扭矩达到第四扭矩时,控制装置可以断开电机的工作电流使电机停止,并断开对驱动轮的扭矩输出,从而电机的实际输出扭矩降低为0。因此,在本实施例中,可以通过监测电机实际输出扭矩是否大于或等于第四扭矩阈值,或者,也可以通过检测电机的实际输出扭矩在单位时间内的变化情况确定割草机是否发生碰撞。
51.在本申请的另一个实施例中,轮监测模块可以包括:电流监测单元,电流监测单元可以用于监测电机中的电流,电机处于运行状态时,当电流监测单元监测到电机中的电流大于或等于预设电流阈值时,可以确定割草机发生碰撞,也可以通过检测电机中的电压等参数是否突然增大至预设电压阈值,以确定割草机是否发生碰撞。预设电流阈值或电压阈值可以由制造商预先设置,也可以是用户根据工况在使用前提前自行设定。如图5所示,以检测电机中的电流为例,当割草机发生碰撞时,电机中的电流会在短时间内突然增大至超过预设电流阈值,从而可以通过检测电机中的电流等相关参数确定割草机发生碰撞。进一步的,当监测到电机中的电流超过预设电流阈值时,控制装置可以断开电机的工作电流使电机停止,从而电机的实际输出电流降低为0。相应的,也可以通过检测电机中电流或电压在单位时间内的变化情况确定割草机是否发生碰撞。
52.在本申请的一个实施例中,割草机可以包括:至少两个电机,该至少两个电机分别驱动至少两个驱动轮转动,控制装置分别独立的控制至少两个电机,控制装置中分别独立的设置有与至少两个电机相关的第一扭矩阈值、第二扭矩阈值以及第三扭矩阈值,相应的,与至少两个电机实际输出扭矩相关的第四扭矩阈值、与电机中的电流相关的预设电流阈值也可以分别单独设置。可以理解的是,为了满足不同场景需要,不同电机相关的阈值可以设置为相同,也可以设置为不同。
53.本申请的实施例中,在满足现有应用场景的情况下,可以通过检测驱动轮的转动情况来确定割草机是否发生碰撞,使用本申请提出的方式识别障碍物时,识别精度较高,无需或者简化了在割草机上所安装的器件,可以节省成本。
54.在本申请的一个实施例中,控制装置中还可以预设有第三扭矩阈值,割草机在转向的运行状态中,控制装置可以控制行走电机的实际输出扭矩最多增大至第三扭矩阈值,第三扭矩阈值小于或等于第一扭矩阈值,且第三扭矩阈值大于第二扭矩阈值。割草机到达
如图1所示的位置处转向时所需要的扭矩大于割草机直行时所需要的扭矩值,因而可以设置大于第二扭矩阈值的第三扭矩阈值,以保证割草机能够顺利完成转向。
55.在本申请的一个实施例中,割草机还可以包括:角度监测装置,该角度监测装置可以用于监测割草机在转向的运动状态中角度变化,当角度监测装置监测到割草机在预设时间段内角度大致不变时,可以确定割草机发生碰撞,解决了由于割草机在转向过程中行走电机的扭矩值大于第二扭矩阈值,割草机遇到障碍物时驱动轮未停止转动,从而无法仅仅根据驱动轮的转动情况判断割草机是否发生碰撞的问题。然而,割草机在转向的过程中角度会随着割草机的转向而变化,因此可以通过角度监测装置监测割草机的角度是否发生变化来确定割草机是否发生碰撞。当通过角度监测装置监测到割草机在预设时间段内角度大致不变时,可以确定割草机发生碰撞。该实施例是对上述通过轮监测模块监测驱动轮是否停止转动,以判断割草机是否发生碰撞的一种补充实施方式。
56.在一个实施例中,角度监测装置可以为惯性测量单元,具体的,可以是陀螺仪。可以通过惯性测量单元检测割草机航向角的变化,从而判断割草机在转向过程中是否发生碰撞。
57.在本申请的一个实施例中,由于工作区域中存在密草、疏草等不同工况,而在一些密草工况下,割草机正常直行工作时遇到的阻力可能与转向时的阻力比较接近,因此,在某些场景下,割草机直行时电机中设定的第二扭矩阈值可能会大于于转向时的第三扭矩阈值。为保证割草机的正常工作,第三扭矩阈值是可调的,以适应不同草坪的工况。例如,控制模块可以根据割草机切割机构中工作电流的变化调整第三扭矩阈值,以适应密草工况或疏草工况的不同要求。
58.同样的,当割草机中存在分别驱动至少两个驱动轮转动的电机时,可以分别在至少两个电机中独立的设置第三扭矩阈值,即,两个电机中的第三扭矩阈值可以为不同的参数,以满足不同驱动轮转向时转向力的需求。
59.进一步的,当确定割草机发生碰撞之后,可以控制割草机停机,后退,转向,或者报警,或者控制割草机绕过障碍物以继续行走。
60.在本申请的实施例中,可以通过检测驱动轮的转动情况来确定割草机是否发生碰撞,使用本申请提出的方式识别障碍物时,识别精度较高,无需在割草机上安装新的器件或者简化了在割草机上安装的器件,节省成本。
61.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1