广义系统下事件触发的网络化T-S模糊H∞控制方法
广义系统下事件触发的网络化t-s模糊h
∞
控制方法
技术领域
1.本发明属于网络化控制领域,具体涉及一种广义系统下事件触发的网络化t-s模糊h∞控制方法。
背景技术:
2.1974年英国控制理论学家罗森布罗克在研究复杂电网络模型时首次提出了广义系统模型,经过40年多年的发展广义系统理论已经在经济系统,电子网络,机器人系统,电力系统等领域得到了广泛的运用,文献1(s.xu,and j.lam,robust control and filtering of singular systems.berlin:springer-verlag,2006)研究了广义系统中的鲁棒控制及滤波问题。研究表明,现实中大部分物理系统是非线性的,对非线性特征建模的困难让对于非线性系统的控制比线性系统要困难很多,t-s模糊模型自被提出以来引起国内外学者的广泛重视,各种关于t-s模糊控制模型的稳定性以及性能分析层出不穷,文献2(t.takagi,m.sugeno.fuzzy identification of systems and its applications to modeling and control[j].ieee trans.systems,man and cybernetics,1985,15(1):116-132.)是最早的关于t-s模糊控制的研究,主要用来辨识非线性系统,文献3(k.tanaka,h.o.wang.fuzzy control systems design and analysis:a linear matrix inequality approach[m].new york:wiley,2001.)tananka和wang则进一步证明了n维情形下的t-s模糊模型的全局逼近特性,t-s模糊模型的研究从此日趋成熟。事件触发机制也越来越成为网络化控制研究的一个热门的研究对象,由于事件触发机制可以极大地节省网络化传输中宝贵的带宽资源,越来越得到国内外学者的广泛关注,与此同时网络化传输中的其他问题也引起了学者们的注意文献4(jiang x f,han q l,liu s r,et al.a newh∞stabilization criterion for networked control systems[j].ieee transactions on automatic control(s0018-9286),2008,53(4):1025-1032.)针对网络化传输中的时滞问题,以及求解lmi时矩阵中出现的非线性项的处理作了深入的研究,文献5(zhang jin,peng chen.event-triggered fault-tolerant control for networked t-s fuzzy systems[j].information and control|inf contrl,2016,45(1):73-78.)对于网络化控制中观测器出现故障的情况下进行稳定性控制。
[0003]
目前广义系统下基于事件触发的t-s模糊网络化控制,这方面的研究比较少,于此同时在推导系统容许性条件的时候,绝大部分现有的此类研究主要使用自由权矩阵法来对李雅普诺夫泛函求导后的结果进行放缩,这种方法会引入未知参数矩阵,加大了矩阵不等式求解的复杂度。
技术实现要素:
[0004]
本发明的目的在于提供一种广义系统下事件触发的网络化t-s模糊h∞控制方法,通过使用詹森不等式以及通过对时滞参数进行更加细致的讨论在不引入新的未知参数矩阵的同时,有效地降低了结果的保守性。
[0005]
实现本发明目的的技术解决方案为:一种广义系统下事件触发的网络化t-s模糊h∞控制方法,包括以下步骤:
[0006]
步骤1,建立广义系统下用t-s模糊模型逼近的非线性系统的方程;
[0007]
步骤2,推导出系统h∞扰动抑制水平为γ的渐进稳定条件并证明其容许性;
[0008]
步骤3,推导出系统的状态反馈增益矩阵k
j
,实现对非线性系统的控制。
[0009]
与现有技术相比,本发明的显著优点为:(1)本发明在处理李雅普诺夫泛函求导后结果的放缩问题时没有使用现有技术通常使用的自由权矩阵法,使用了詹森不等式来进行放缩,避免引入未知变量降低了求解的复杂性,同时对时滞的讨论也更加的细致,降低了结果的保守性;(2)本发明在处理非线性系统的网络化控制问题时,同时将广义系统、t-s模糊控制、事件触发机制结合起来进行研究,更加切合实际问题的研究需要,广义系统是比正常系统更具广泛形式的动力系统,于此同时现实中的大部分系统都是非线性的,t-s模糊控制可以更好地研究非线性系统,事件触发机制则可以降低网络化控制问题中带宽资源有限的问题,因此本技术更加切合实际需求,有很大的现实意义。
附图说明
[0010]
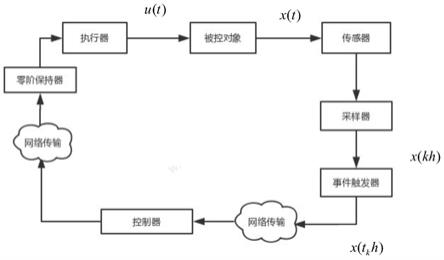
图1为基于事件触发机制的网络化控制的结构框图。
[0011]
图2为事件触发机制所传输的信号图。
[0012]
图3为闭环系统的状态轨迹图。
具体实施方式
[0013]
一种广义系统下事件触发的网络化t-s模糊h∞控制方法,包括以下步骤:
[0014]
步骤1,建立广义系统下用t-s模糊模型逼近的非线性系统的方程;
[0015]
步骤2,推导出系统h∞扰动抑制水平为γ的渐进稳定条件并证明其容许性;
[0016]
步骤3,推导出系统的状态反馈增益矩阵k
j
,实现对非线性系统的控制。
[0017]
进一步的,步骤1中,建立广义系统下的t-s模糊模型逼近的非线性系统的方程,具体包括以下步骤:
[0018]
步骤1-1、构建带有时延和事件触发的网络化控制系统;
[0019]
网络化控制系统由被控对象即非线性系统、传感器、采样器、事件触发器、控制器、零阶保持器、执行器几部分组成,如图1所示,网络化控制系统的工作原理:首先由传感器以固定采样周期h时间触发接收到来自非线性系统中的状态信号x(t),然后传感器将接收到的信号发送到采样器,其中的采样信号序列可以描述成:s1={x(h),x(2h),x(3h),...,x(kh)}其中k∈n,n代表自然数,x(kh)表示第k个采样信号;采样器将信号序列传送给事件触发器,信号能否被传送到后面的控制器取决于事件触发器,只有满足触发条件的信号才会被传输到控制器,不符合触发条件的信号不予传输;假定在采样器和控制器之间不存在丢包现象,传感器端被成功传送到控制器的采样信号序列可以描述成序列s2={x(t1h),x(t2h),x(t3h),...,x(t
k
h)},其中t
k
∈n,x(t
k
h)表示第k个被成功传输的采样信号序列;显然有控制器会将接收到的状态信号转换为状态反馈信号先发送到零阶保持器中,零阶保持器会生成执行器的输入信号,零阶保持器的保持时间为:k
表示自然数,是第k个控制信号到达被控对象也就是非线性系统的时刻,其中表示第k个控制信号的网络诱导延时,若只考虑网络传输延时,可以得到如下表达式:其中η
sc
(t
k
)是第k个触发信号从事件触发器到达控制器的延时,η
ca
(t
k
)是第k个控制信号从控制器到达执行器的延时,且网络延时是有上下界的,其中η
m
和η
m
分别定义时滞的下界和上界,如果所有的采样信号都被传送,有s1=s2,事件触发就变成时间触发,如有一些采样信号未被传送,则说明事件触发器产生了作用;最后由执行器将状态反馈信号传输给被控对象即非线性系统,从而实现了对非线性系统的控制。
[0020]
步骤1-2、建立广义系统下的t-s模糊控制系统模型:
[0021]
对象规则i:如果θ1(t)是m
i1
且θ2(t)是m
i2
且...θ
p
(t)是m
ip
,则:
[0022][0023]
式中:x(t)∈r
n
是状态向量,n表示向量的维数;u(t)∈r
m
是控制输入向量,m表示向量的维数;w(t)∈l2[0,∞)是外部扰动输入向量;z(t)∈r
p
是控制输出向量,p表示向量的维数;e是奇异矩阵,e的秩小于等于e的维数,是恒定的具有适当维数的矩阵;系统的初始条件为x(t0)=x0;m
ij
是模糊集合;r是模糊规则数;θ(t)=[θ1(t),θ2(t),...,θ
p
(t),]是前件变量向量,m
ij
(θ
j
(t))表示θ
j
(t)在m
ij
中的隶属度。
[0024]
运用解模糊原理,系统方程可以写成:
[0025][0026][0027]
步骤1-3、设计状态反馈控制器并将其作用到上述非线性系统中:
[0028]
设计的事件触发机制的触发条件如下:式子中的e
k
(i
k
h)=x(i
k
h)-x(t
k
h),其中x(i
k
h)表示当前到达事件触发器的采样信号,i
k
h则表示最近一次的采样信号到达事件触发器的时间,x(t
k
h)表示最近一次被传送出去的采样信号,t
k
h表示最近一次采样信号被传输的时刻,e
k
(i
k
h)表示两者之差,i
k
h=t
k
h+nh,n和k表示自然数,w是一个正定矩阵,δ∈[0,1]是有界正实数。利用分布补偿原则(简称pdc)我们设计一个状态反馈控制器:假设系统的状态可以直接观测,对于在状态反馈控制器的作用下可以得到如下系统模型:
[0029][0030]
根据已有的分析方法,将零阶保持器的保持间隔t∈ω分成间隔子集合:有ω=∪ω
n
,其中i
k
h=t
k
h+nh,n=0,...,t
k+1-t
k-1表示当前已传
[0031]
送的采样时刻t
k
h到下一个将要传送的采样时刻t
k+1
h之间的采样时刻点,如果n取t
k+1-t
k-1
[0032]
则有否则则有定义η(t)=t-i
k
h,t∈ω
n
,η(t)是一个分段函数满足:0<η
m
≤η(t)≤h+η
m
,其中η
m
,η
m
分别代表了最小允许通信
[0033]
延时、最大允许通信延时。反馈控制器可以用如下方式表示:
[0034][0035]
则闭环系统模型可由如下方法表示:
[0036][0037]
进一步的,步骤2中推导出使得非线性系统稳定的条件:
[0038]
首先构建lyapunov-krasovskii泛函:
[0039][0040]
式中:p,q1,q2,q3,z1,z2,s都是正定对称矩阵,
[0041][0042]
对lyapunov-krasovskii泛函求导,运用詹森不等式进行放缩,再结合事件触发机制的触发条件,运用舒尔补引理可以得到如下h∞稳定性判据同时系统是容许的:
[0043]
对于给定的参数η
m
,η
m
,γ,δ和反馈增益k
j
,事件触发矩阵w,在事件触发条件下如果存在合适维数的正定对称矩阵p,q1,q2,q3,z1,z2,s,满足下面的矩阵不等式:
[0044]
e
t
p=p
t
e≥0
[0045]
[0046]
则称闭环系统是容许的并且h∞扰动抑制水平为γ,其中
[0047][0048][0049][0050][0051][0052][0053][0054][0055][0056]
进一步的,求出系统的状态反馈增益矩阵k
j
[0057]
定义:
[0058][0059]
对左乘diag{x,x,x,x,x,i,i,i,i,
i}右乘其转置,可以得到:
[0060][0061]
其中:
[0062][0063][0064][0065][0066][0067][0068][0069][0070][0071]
其中
[0072][0073]
对矩阵中的非线性项进行处理,再使用matlab通过给定的矩阵和参数计算出k
j
的值。
[0074]
本发明的控制方法可以使建立在广义系统下待控制系统为非线性系统和外部有干扰的情况下能实现系统的稳定,本发明设计了一个状态反馈控制器从而实现了对系统的控制,相比于以往的研究,在推导系统稳定性条件时,使用的是詹森不等式没有使用自由权矩阵法,避免引入新的参数,同时本发明对系统中的时滞进行了更加细致的讨论,降低了结果的保守性。在网络化传输的过程中有很大的应用价值,是一种稳定可靠的控制方法。
[0075]
下面结合实施例对本发明进行详细说明。
[0076]
实施例
[0077]
一种广义系统下基于事件触发的网络化t-s模糊h∞控制方法,包括以下步骤:
[0078]
步骤1、建立广义系统下的t-s模糊系统模型
[0079]
对象规则i:如果θ1(t)是m
i1
且θ2(t)是m
i2
且...θ
p
(t)是m
ip
,则:
[0080][0081]
式中:x(t)∈r
n
是状态向量,n表示向量的维数;u(t)∈r
m
是控制输入向量,m表示向量的维数;w(t)∈l2[0,∞)是外部扰动输入向量;z(t)∈r
p
是控制输出向量,p表示向量的维数;e是奇异矩阵,e的秩小于等于e的维数,a
i
,b
i
,b
wi
,c
i
,d
i
是恒定的具有适当维数的矩阵;系统的初始条件为x(t0)=x0;m
ij
是模糊集合;r是模糊规则数;θ(t)=[θ1(t),θ2(t),...,θ
p
(t),]是前件变量向量,m
ij
(θ
j
(t))表示θ
j
(t)在m
ij
中的隶属度。
[0082]
运用解模糊原理,系统方程可以写成:
[0083][0084]
其中
[0085]
在事件触发机制下的闭环系统为:
[0086][0087]
式子中e
k
(i
k
h)=x(i
k
h)-x(t
k
h),其中x(i
k
h)表示当前采样信号,x(t
k
h)表示最近一次被传送出去的采样信号,e
k
(i
k
h)表示两者之差,i
k
h=t
k
h+nh,n∈n,k∈n。w是给定的正定对称矩阵,δ∈[0,1]是有界正实数。
[0088]
步骤2、推导广义t-s模糊系统模型的容许性条件:
[0089]
步骤2-1、构建系统方程的lyapunov-krasovskii泛函:
[0090][0091]
式中:
[0092]
步骤2-2、对lyapunov-krasovskii泛函求导:
[0093][0094]
步骤2-3、推导系统的容许性条件:
[0095]
在触发条件中,i
k
h∈[t
k
h,t
k+1
h),有
[0096]
e
kt
(i
k
h)we
k
(i
k
h)≤δ[x(i
k
h)-x(t
k
h)]
t
w[x(i
k
h)-x(t
k
h)],
[0097]
应用詹森不等式以及文献6(a new h∞stabilization criterion for networked control systems)中的方法可以得到:
[0098][0099][0100][0101]
(1)当可以得到
[0102]
定义:
[0103]
结合舒尔补引理可以推得:
[0104][0105]
式中:其中:
[0106][0107][0108][0109][0110][0111][0112]
(2)当可以得到
[0113]
此时
[0114][0115][0116][0117][0118][0119]
由舒尔补引理可知,上式中的lyapunov-krasovskii泛函保证了同时易
证明在w(t)≡0的情况下系统是渐近稳定的,且在零初始条件下||z(t)||2≤γ||w(t)||2。
[0120]
已知rank(e)=r<n,一定存在可逆矩阵m和n∈r
n*n
使得:
[0121][0122][0123]
由上面的推导可以得到
[0124]
结合上面的式子可以得到:由于q
i
>0(i=1,2,3),可以
[0125]
推得:由此可得a
i.22
是非奇异的,即det(se-a
i
)不恒等于零与此同时
[0126]
deg(det(se-a
i
))=r=rank(e),由此可以由定义推出系统是正定的,无脉冲的,再结合上面已
[0127]
经证明的稳定性可以得到系统是容许的。
[0128]
步骤3、求出系统的状态反馈增益矩阵k;
[0129]
步骤3-1、定义x=p-1
,对矩阵和的两边分别相应地左乘和右乘diag{x,x,x,x,x,i,i,i,i,i}及其转置,得到下面的矩阵:
[0130][0131]
其中:
[0132]
[0133][0134][0135][0136][0137][0138][0139][0140][0141]
其中x=p-1
,
[0142][0143]
步骤3-2、消除矩阵中的非线性项:
[0144]
在中存在非线性项:无法直接用matlab lmi工具箱求解,需要对矩阵不等式进行线性化处理,利用不等式变换法可得进而对非线性项进行处理。
[0145]
步骤3-3、运用matlab lmi工具箱进行计算得到反馈增益矩阵k。
[0146]
下面选取质点弹簧系统作为实例,建立系统模型:
[0147][0148]
式中x1∈[-1,1],选取w=0.2sin(2πt)exp(-t)作为外部干扰
[0149]
建立模糊规则:
[0150]
对象规则i:如果x
i
是λ
i
,则:
[0151][0152]
式中式中初始值选择x(0)=[-1 1]。
[0153]
选取参数δ=0.05,μ
m
=0.01μ
m
=0.05,γ=20,采样周期选择h=0.1s,使用matlab进行仿真得到状态反馈增益矩阵为:k1=[-0.0069 6.971];k2=[-0.1099 0.0338]
[0154]
最后,对仿真结果作出总结,如图2所示只有符合传输条件的采样信号才会被传输,采样器中传输了60个状态信号,但通过事件触发器传输到控制器中的信号只有31个节约了48.33%的带宽资源,由此可见本发明有效地节约了网络化传输过程中的带宽资源,如图3所示,闭环系统是渐进稳定的,从而说明了本发明所提出的方法的有效性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1