用于自动引导车辆的二次定位的装置和方法与流程
1.本公开的实施例涉及用于车辆的二次定位的装置和方法,包括该装置的自动引导车辆,以及包括自动引导车辆的自动引导系统。
背景技术:
2.自动引导车辆(agv)在制造工厂中被用于材料处理或转移。agv是指配备有自动引导设备并且能够沿着规定的引导路径行进的运输车辆。agv的导航和定位在agv的实践中通常很重要。
3.agv的导航采用诸如磁性条带线路引导、同步定位和建图(slam)、反射板激光扫描、视觉引导、基于陀螺仪的惯性引导或其组合等若干方式。在磁性条带线路引导中,磁性条带被附接到制造工厂的地板表面上,并且通过磁感应信号来实现导航。
4.由于agv上的负载可能不同,并且agv距制动点的制动距离对于各种定制过程可能不同,因此当agv到达目标停止位置附近时,agv的实际停止位置在相应的定制过程中可能不同。因此,agv停止后需要进行二次定位,以确保agv与用于agv的外围设备的适当的耦合。应当标识出agv的实际停止位置与目标停止位置之间的偏移,以便调整agv的二次定位。
5.在agv的实践中,agv的实际停止位置的可重复性较差。期望为agv相对于外围设备的二次定位提供改进的解决方案。
技术实现要素:
6.总体上,本公开的实施例涉及用于车辆的二次定位的装置和方法、包括该装置的自动引导车辆、以及包括自动引导车辆的自动引导系统,其能够提供有效的解决方案,以确保二次定位的可重复性,这已经改进了用于agv的鲁棒性以及对环境和各种应用不敏感的可靠测量信号。
7.在第一方面中,本公开的实施例提供了用于车辆的二次定位的装置。该装置包括:第一磁传感器,被设置在车辆上并且被配置为在车辆从行进变为停止之后测量第一磁传感器与第一磁性条带之间的第一未对准并且生成表示第一未对准的第一偏移信号,其中第一磁性条带在与车辆的行进路径交叉的方向上延伸;以及控制器,被配置为至少部分地基于第一偏移信号来控制车辆,从而调整车辆和/或与车辆相关联的外围设备的定位。
8.与常规的解决方案相比,根据本公开的实施例的装置可以提供用于二次定位的大调整范围,基于来自磁传感器的可靠偏移测量信号的准确的补偿量、用于控制器的较少的计算工作量和快速响应,并且不受agv应用的限制。
9.在一些实施例中,控制器进一步被配置为:基于第一偏移信号生成补偿信号;并且控制车辆以引起车辆的驱动轮移动以便基于补偿信号调整车辆的定位。
10.在一些实施例中,控制器进一步被配置为:基于第一偏移信号生成补偿信号;控制车辆以保持静止;并且向外围设备发送补偿信号以引起外围设备基于补偿信号调整外围设备的定位。
11.在一些实施例中,第一磁性条带在垂直于行进路径的方向上延伸。
12.在一些实施例中,第一磁传感器平行于行进路径被设置在车辆上。
13.在一些实施例中,第一磁传感器被配置为测量第一磁传感器的中心与第一磁性条带的中心线之间的第一未对准。
14.在一些实施例中,第一磁性条带被设置在车辆的目标停止位置处。
15.在一些实施例中,第一磁性条带的极性与沿着行进路径被设置的用于导航车辆的第二磁性条带的极性相反。
16.在一些实施例中,装置进一步包括:第二磁传感器,被设置在车辆上并且被配置为在车辆停止之后测量第二磁传感器与第二磁性条带之间的第二未对准,并且生成表示第二未对准的第二偏移信号,第二磁性条带沿着行进路径被设置以用于导航车辆;以及第三磁传感器,被设置在车辆上并且被配置为在车辆停止之后测量第三磁传感器与第二磁性条带之间的第三未对准,并且生成表示第三未对准的第三偏移信号,其中控制器被配置为基于第一偏移信号、第二偏移信号和第三偏移信号控制车辆。
17.在一些实施例中,第二磁传感器垂直于行进路径被设置在车辆的前侧上并且被配置为测量第二磁传感器的中心与第二磁性条带的中心线之间的第二未对准;并且第三磁传感器垂直于行进路径被设置在车辆的后侧上并且被配置为测量第三磁传感器的中心与第二磁性条带的中心线之间的第三未对准。
18.在第二方面中,本公开的实施例提供了一种自动引导车辆。自动引导车辆包括如上所述的装置。
19.在一些实施例中,自动引导车辆进一步包括:无线读取器,被配置为检测被设置在行进路径上的预定停止命令点,并且响应于检测到预定停止命令点而生成停止命令信号。
20.在一些实施例中,控制器进一步被配置为响应于停止命令信号控制车辆制动。
21.在第三方面中,本公开的实施例提供了一种自动引导系统。自动引导系统包括:如上所述的自动引导车辆;以及第一磁性条带,在与自动引导车辆的行进路径交叉的方向上延伸。
22.在一些实施例中,第一磁性条带在垂直于行进路径的方向上延伸。
23.在一些实施例中,自动引导系统进一步包括:第二磁性条带,沿着行进路径被设置以用于导航自动引导车辆,并且具有与第一磁性条带的极性相反的极性。
24.在第四方面中,本公开的实施例提供了用于车辆的二次定位的方法。该方法包括:在车辆从行进变为停止之后接收第一偏移信号,第一偏移信号表示被设置在车辆上的第一磁传感器与在与车辆的行进路径交叉方向上延伸的第一磁性条带之间的第一未对准;并且至少部分地基于第一偏移信号控制车辆,从而调整车辆和/或与车辆相关联的外围设备的定位。
25.在一些实施例中,控制车辆以调整定位包括:基于第一偏移信号生成补偿信号;并且控制车辆以引起车辆的驱动轮移动,以便基于补偿信号调整车辆的定位。
26.在一些实施例中,控制车辆以调整定位包括:基于第一偏移信号生成补偿信号;控制车辆以保持静止;并且向外围设备发送补偿信号以引起外围设备基于补偿信号调整外围设备的定位。
27.在一些实施例中,方法进一步包括:在车辆停止之后接收第二偏移信号,第二偏移
信号表示被设置在车辆上的第二磁传感器与沿着行进路径被设置的第二磁性条带之间的第二未对准;在车辆停止之后接收第三偏移信号,第三偏移信号表示被设置在车辆上的第三磁传感器与第二磁性条带之间的第三未对准;并且基于第一偏移信号、第二偏移信号和第三偏移信号生成补偿信号。
28.根据本公开的实施例,通过有效的解决方案实现了agv和与agv相关联的外围设备的适当的耦合,以确保二次定位的可重复性,这已经改进了用于agv的鲁棒性以及对环境和各种应用不敏感的可靠测量信号。
附图说明
29.参考附图示出和说明了实施例。附图用于说明基本原理,因此仅说明了用于理解基本原理所必需的方面。附图未按比例绘制。为了更完整地理解本发明及其优点,现结合附图参考以下描述,其中:
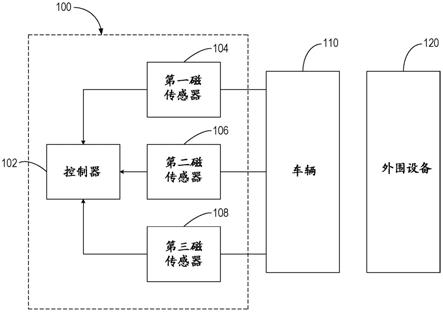
30.图1图示了根据本公开的实施例的用于车辆的二次定位的装置的框图;
31.图2图示了根据本公开的实施例的在行进路径上的车辆的示意图;
32.图3图示了根据本公开的实施例的在预定停止命令点处的车辆的示意图;
33.图4图示了根据本公开的实施例的在实际停止位置处的车辆的示意图;
34.图5图示了根据本公开的实施例的车辆相对于外围设备的二次定位的示意图;以及
35.图6图示了根据本公开的实施例的用于车辆的二次定位的方法的流程图。
具体实施方式
36.现在将参考几个示例实施例来讨论本文描述的主题。讨论这些实施例仅是为了使本领域技术人员能够更好地理解并且因此实施本文描述的主题,而不是暗示对主题范围的任何限制。
37.术语“包括”或“包含”及其变体将被理解为表示“包括但不限于”的开放术语。除非上下文另有明确说明,否则术语“或”要被理解为“和/或”。术语“基于”要被理解为“至少部分地基于”。术语“一个实施例”和“实施例”要被理解为“至少一个实施例”。术语“另一实施例”要被理解为“至少一个其它实施例”。除非另有说明或限制,否则术语“安装”、“连接”、“支撑”和“耦合”及其变体被广义地使用,并且包括直接和间接的安装、连接、支撑和耦合。此外,“连接”和“耦合”不限于物理或机械的连接或耦合。在下文的描述中,相同的附图标记和标签被用于描述图中相同、相似或对应的部分。下文可能包括其它显式或隐式定义。
38.在用于agv的二次定位的现有的解决方案中,例如在专利公开cn107014291a中,提供了借助图片处理技术的视觉伺服来提取环境特征以标识实际偏移。另外,在slam的现有的解决方案中,基于slam算法,通过扫描周围环境,标识出agv在预建地图中的位置和角度。然而,在agv的基于视觉或slam的二次定位中,需要处理大量数据,这限制了其反应速度。此外,在利用二维qr码的现有的解决方案中,基于扫码器的二次定位对工作环境敏感,并且对许多应用都有约束。
39.为了至少部分地解决上述和潜在的其它问题,本公开的实施例提供了用于agv的二次定位的改进的解决方案。该解决方案利用测量机构通过磁传感器和控制器计算agv的
实际停止位置与目标停止位置之间的偏移,以用于后续的补偿调整。
40.根据本公开的实施例,被设置在agv上的磁传感器被配置为在agv从行进变为停止之后测量磁传感器与磁性条带之间的未对准,并且生成表示未对准的偏移信号。磁性条带在与agv的行进路径交叉的方向上延伸。被电气地耦合到磁传感器的控制器被配置为至少部分地基于偏移信号来控制agv,从而调整agv相对于外围设备的二次定位。
41.因此,用于二次定位的补偿调整通过agv或外围设备启用,从而确保agv和与agv相关联的外围设备的适当耦合。本公开的实施例提供了有效的解决方案以确保二次定位的可重复性,这已经改进了用于agv的鲁棒性以及对环境和各种应用不敏感的可靠的测量信号。
42.在下文中,将参照附图详细描述本公开的一些示例实施例。
43.图1图示了根据本公开的实施例的用于车辆110的二次定位的装置100的框图。如图所示,装置100包括控制器102和第一磁传感器104。第一磁传感器104被设置在车辆110上。在一些实施例中,控制器102被设置在车辆110上。在其它实施例中,控制器102被设置在车辆110的外部。在一些实施例中,车辆110是自动引导车辆(agv)并且沿着规定的引导路径行进。
44.第一磁传感器104被配置为在车辆110从行进变为停止之后测量第一磁传感器104与第一磁性条带之间的第一未对准。第一磁性条带在与车辆110的行进路径交叉的方向上延伸。在一些实施例中,第一磁性条带在基本上垂直于行进路径的方向上延伸。此外,第一磁传感器104被配置为生成表示第一未对准的第一偏移信号。在一些实施例中,第一未对准或第一偏移信号指示车辆110在平行于行进路径的方向上与第一磁性条带或目标停止位置的偏移。
45.控制器102被电气地耦合到第一磁传感器104以接收第一偏移信号。然后可以至少部分地基于第一偏移信号来控制车辆110。因此,可以调整车辆110和/或与车辆110相关联的外围设备120的定位。在一些实施例中,外围设备120包括在制造工厂中的任何种类的各种处理工具。在一些实施例中,在车辆110从行进变为停止之后,控制器102控制车辆110以调整车辆110的定位,以补偿由第一磁传感器104测量的第一未对准。在其它实施例中,控制器102引起外围设备120移动一定距离以便补偿第一未对准。在又一些实施例中,控制器102引起车辆110和外围设备120两者调整它们的定位或移动一定距离以补偿第一未对准。
46.因此,控制器102被配置为相对于外围设备120调整车辆110的二次定位。以此方式,可以通过二次定位来补偿第一未对准,以确保车辆110和外围设备120的适当的耦合,以将材料或物品从车辆110递送到外围设备120。
47.如图1所示,在一些实施例中,装置100可以进一步包括第二磁传感器106和第三磁传感器108,第二磁传感器106和第三磁传感器108两者都被电气地耦合到控制器102。
48.第二磁传感器106可以被设置在车辆110上并且可以被配置为在车辆110停止之后测量第二磁传感器106与行进路径之间的第二未对准。第二磁传感器106进一步被配置为生成表示第二未对准的第二偏移信号。在一些实施例中,第二未对准或第二偏移信号指示车辆110在垂直于行进路径的方向上从行进路径的前偏移。
49.第三磁传感器108可以被设置在车辆110上并且可以被配置为在车辆110停止之后测量第三磁传感器108与行进路径之间的第三未对准。第三磁传感器108进一步被配置为生成表示第三未对准的第三偏移信号。在一些实施例中,第三未对准或第三偏移信号指示车
辆110在垂直于行进路径的方向上从行进路径的后偏移。
50.在一些实施例中,第二磁传感器106和第三磁传感器108被配置为设置在车辆110上的一对传感器,用于测量车辆110由于第二未对准和第三未对准而与行进路径的角度偏移。通过第一磁传感器104、第二磁传感器106和第三磁传感器108的布置,可以测量车辆110在其停止之后与目标停止位置的各种位置偏移。
51.在那些实施例中,控制器102可以被配置为分别从第二磁传感器106和第三磁传感器108接收第二偏移信号和第三偏移信号。然后,控制器102可以使用第二偏移信号和第三偏移信号连同第一偏移信号来控制车辆,更具体地来调整车辆110相对于外围设备120的二次定位。在一些实施例中,控制器102控制车辆110以在平行于行进路径的第一方向上以及在垂直于行进路径的第二方向上调整车辆110的定位,以便补偿未对准。在其它实施例中,控制器102引起外围设备120在第一方向和第二方向两者上调整外围设备120的定位,以便补偿未对准。在又一些实施例中,控制器102引起车辆110和外围设备120两者都调整它们的定位以补偿未对准。
52.因此,在车辆110在目标停止位置附近停止之后,确定由来自第一磁传感器104的第一偏移信号指示的偏移、由来自一对第二磁传感器106和第三磁传感器108的第二偏移信号和第三偏移信号的组合指示的角度偏移。以此方式,二次定位的控制可以具有很大的调整范围,并且可以通过二次定位来补偿第一未对准、第二未对准和第三未对准,以确保车辆和外围设备120的适当的耦合。
53.图2图示了根据本公开的实施例的在行进路径上的车辆的示意图。在一些实施例中,如图1所示的车辆110是自动引导车辆(agv)200。在该示例中,agv 200被布置在自动引导系统220内并且包括上文参照图1描述的装置100。应当注意,在其它实施例中,车辆110可以是适用于在制造工厂中的应用的任何其它类型的车辆。
54.图2进一步图示了包括agv 200、第一磁性条带212和第二磁性条带210的自动引导系统220。第一磁性条带210和第二磁性条带212被附接到agv 200的行进区域的地板表面上。
55.在一些实施例中,如图2所示,agv 200可以包括被分别设置在其左侧和右侧的驱动轮202和204。在一些实施例中,驱动轮202和204被控制使得agv 200沿着规定的引导路径行进。在一些实施例中,驱动轮202和204由控制器102控制。应当理解,agv 200还包括图2中未示出的其它部件。
56.在图2所示的实施例中,agv 200的第一磁传感器104被设置为与agv 200上的行进路径p平行。以此方式,第一磁传感器104可以被用于测量agv 200在与行进路径平行的方向上与目标位置的偏移。
57.此外,agv 200的第二磁传感器106在基本上垂直于行进路径p的方向上被设置在agv 200的前侧上,并且agv 200的第三磁传感器108在基本上垂直于行进路径p的方向上被设置在agv 200的后侧上。以此方式,一对第二磁传感器106和第三磁传感器108可以被用于在垂直于行进路径的方向上测量agv 200的前侧处的一个偏移和agv 200的后侧处的另一偏移,并且因此能够测量agv 200与行进路径的角度偏移。
58.通过在agv 200上布置第一磁传感器104、第二磁传感器106和第三磁传感器108,能够测量当agv 200在目标位置附近停止时可能发生的各种偏移。
59.在操作中,agv 200可以沿着行进路径p被引导。在一些实施例中,第二磁性条带210可以沿着行进路径p被设置以用于导航agv200。在一些实施例中,第二磁性条带210被附接到制造工厂的地板表面上,使得agv的导航以磁性条带线路引导方式被实现。
60.备选地或附加地,在一些实施例中,agv 200可以以其它方式沿着行进路径p被引导,诸如slam、反射板激光扫描、视觉引导、基于陀螺仪的惯性引导、或其组合等。
61.如图2所示,第一磁性条带212在与agv 200的行进路径p交叉的方向上延伸。在一些实施例中,第一磁性条带212在基本上垂直于行进路径p的方向上延伸。在一些实施例中,第一磁性条带212被设置为垂直于第二磁性条带210。在一些实施例中,第一磁性条带212被设置在用于agv 200的目标停止位置s处。在一些实施例中,第一磁性条带212的极性与第二磁性条带210的极性相反。以此方式,可以减少或消除第一磁性条带212对第二磁性条带210造成的干扰,从而确保agv 200通过第二磁性条带210的导航。
62.在一些实施例中,自动引导系统220可以进一步包括被设置在行进路径p上的预定停止命令点214。在一些实施例中,预定停止命令点214被设置在第二磁性条带210上。如下所述,预定停止命令点214指示agv 200开始制动的位置。
63.图3图示了根据本公开的实施例的在预定停止命令点214处的agv 200的示意图。agv 200从图2中所示的位置行进到图3中所示的位置。
64.在一些实施例中,agv 200可以进一步包括设置在其上的无线读取器206。在一些实施例中,无线读取器206可以被设置在agv 200的中心线上。无线读取器206可以被配置为检测预定停止命令点214并且响应于检测到预定停止命令点214而生成停止命令信号。在一些实施例中,控制器102被电气地耦合到无线读取器206,并且控制器102进一步被配置为响应于停止命令信号而控制agv 200制动。
65.参考图3,当无线读取器206检测到预定停止命令点214时,agv200被控制以开始制动。由于agv 200上的负载对于各种定制过程是不同的,因此对于相应的定制过程,agv 200距预定停止命令点214的制动距离可能是不同的。因此,agv 200通常针对相应的定制过程在不同的实际停止位置处停止。
66.图4图示了根据本公开的实施例的在实际停止位置处的agv 200的示意图。在该实施例中,测量第一磁传感器104与第一磁性条带212之间的位置关系,以确定agv 200的实际停止位置与目标停止位置s的偏移。
67.第一磁传感器104被配置为当agv 200在图4中所示的位置处停止时,测量第一磁传感器104与第一磁性条带212之间的第一未对准。在一些实施例中,第一磁传感器104可以测量第一磁传感器104的中心与第一磁性条带212的中心线之间的第一未对准。然后第一磁传感器104生成表示第一未对准的第一偏移信号。在一些实施例中,第一偏移信号指示agv 200的实际停止位置与目标停止位置s之间的在平行于行进路径p的方向上的第一未对准。以此方式,可以通过第一磁传感器104获得agv 200的实际停止位置与目标位置的偏移。
68.控制器102被配置为至少部分地基于第一偏移信号来控制agv200,从而调整agv 200相对于与agv 200相关联的外围设备120的二次定位。在一些实施例中,控制器102引起agv 200基于第一偏移信号移动,以补偿由第一偏移信号指示的第一未对准。备选地,在其它实施例中,控制器102被配置为引起外围设备120基于第一偏移信号移动,以补偿由第一偏移信号指示的第一未对准。
69.在一些实施例中,第二磁传感器106在agv 200停止之后测量第二磁传感器106与第二磁性条带210之间的第二未对准。在一些实施例中,第二磁传感器106可以测量第二磁传感器106的中心与第二磁性条带210的中心线之间的第二未对准。可以生成表示测量的第二未对准的第二偏移信号。在一些实施例中,第二偏移信号指示agv200的实际停止位置与行进路径p之间的在垂直于行进路径p的方向上的第二未对准。以此方式,可以通过第二磁传感器106获得agv 200的实际停止位置与前侧处的目标位置的前偏移。
70.在一些实施例中,第三磁传感器108在agv 200停止之后测量第三磁传感器108与第二磁性条带210之间的第三未对准。例如,第三未对准在第三磁传感器108的中心与第二磁性条带210的中心线之间。然后第三磁传感器108可以生成表示第三未对准的第三偏移信号。例如,第三偏移信号指示agv 200的实际停止位置与行进路径p之间的在垂直于行进路径p的方向上的第三未对准。以此方式,可以通过第三磁传感器108获得agv 200的实际停止位置与后侧处的目标位置的后偏移。
71.通过一对第二磁传感器106和第三磁传感器108的布置,可以通过控制器102从前偏移和后偏移进一步导出agv 200与行进路径p的角度偏移。
72.在一些实施例中,由控制器102使用所有的第一偏移信号、第二偏移信号和第三偏移信号来控制车辆,以调整agv 200相对于与agv 200相关联的外围设备120的二次定位。然后,例如,可以基于第一偏移信号、第二偏移信号和第三偏移信号生成补偿信号,并且被用于控制针对二次定位的调整。例如,在一些实施例中,第一偏移信号、第二偏移信号和第三偏移信号被用于控制agv 200和/或其外围设备120的移动,以分别补偿第一未对准、第二未对准和第三未对准。
73.应当注意,第一磁传感器104、第二磁传感器106和第三磁传感器108中的任何磁传感器可以利用本领域公知的任何种类的磁传感器,用于测量位置未对准。本公开的范围在这方面不受限制。
74.图5图示了根据本公开的实施例的agv 200相对于外围设备120的二次定位的示意图。如图5所示,外围设备120位于预定位置处。图5进一步示出了agv 200位于外围设备120附近的实际停止位置处。
75.如上所述,在agv 200停止之后从第一磁传感器104生成第一偏移信号,并且控制器102被配置为基于第一偏移信号生成补偿信号。在一些实施例中,如由图5中所示的第一箭头302在平行于行进路径的方向上所指示,控制器102被配置为控制车辆200以引起agv 200的驱动轮202、204移动,以便基于补偿信号调整agv 200的定位。备选地,在其它实施例中,如由图5中所示的第二箭头304在平行于行进路径的另一方向上所指示,当将补偿信号发送给外围设备120以引起外围设备120基于补偿信号调整外围设备120的定位时,控制器102可以控制agv 200以保持静止。
76.以此方式,agv相对于外围设备120的二次定位被控制,以补偿在平行于行进路径p的方向上的偏移。
77.同样,在生成第二偏移信号和第三偏移信号并且基于第一偏移信号、第二偏移信号和第三偏移信号生成补偿信号的那些实施例中,如由图5中所示的第三箭头306在平行于行进路径的方向上以及在垂直于行进路径的方向上所指示,控制器102可以控制车辆200以引起agv 200的驱动轮202、204移动,以便基于补偿信号调整agv 200的定位。备选地,如由
图5中所示的第四箭头308在平行于行进路径的另一方向上以及在垂直于行进路径的另一方向上所指示,当由补偿信号控制外围设备120以基于补偿信号调整外围设备120的定位时,agv 200可以保持静止。
78.以此方式,agv相对于外围设备120的二次定位被控制以补偿在平行于行进路径p的方向上的偏移以及在垂直于行进路径p的方向上的前偏移和后偏移。
79.根据本公开的实施例,可以补偿第一未对准、第二未对准和第三未对准,并且因此二次定位可以具有大调整范围。另外,从磁传感器生成的偏移信号是可靠的并且数据量少,并且因此针对控制器的计算工作量较少,并且二次定位可以具有快速的响应。此外,针对对于未对准的补偿的二次定位可能不受agv或agv的环境的影响,并且因此对agv应用没有限制。
80.图6图示了根据本公开的实施例的用于车辆的二次定位的方法400的流程图。如图6所示,方法400包括框402和框404。
81.在框402处,方法400包括在agv 200从行进变为停止之后,接收第一偏移信号,第一偏移信号表示被设置在agv 200上的第一磁传感器104与在与agv 200的行进路径p交叉的方向上延伸的第一磁性条带212之间的第一未对准。
82.在框404处,方法400包括至少部分地基于第一偏移信号控制agv 200,从而调整agv 200或与agv 200相关联的外围设备120的定位。
83.在一些实施例中,控制agv 200以调整定位包括基于第一偏移信号生成补偿信号,并且控制agv 200以引起agv 200的驱动轮202、204移动,以便基于补偿信号调整agv 200的定位。备选地,控制agv 200以调整定位包括基于第一偏移信号生成补偿信号,控制agv 200以保持静止,并且将补偿信号发送给外围设备120以引起外围设备120基于补偿信号调整外围设备120的定位。
84.在一些实施例中,方法400可以进一步包括在自动引导车辆200停止之后接收第二偏移信号,第二偏移信号表示被设置在agv 200上的第二磁传感器106与沿着行进路径p被设置的第二磁性条带212之间的第二未对准,以及在自动引导车辆(200)停止之后接收第三偏移信号,第三偏移信号表示被设置在agv 200上的第三磁传感器108与第二磁性条带212之间的第三未对准。在一些实施例中,方法400可以进一步包括基于第一偏移信号、第二偏移信号和第三偏移信号生成补偿信号,以基于补偿信号控制agv 200相对于外围设备120的定位。
85.尽管在上述讨论中包含若干细节,但是这些不应被解释为对本文所述主题的范围的限制,而应被解释为对可能特定于特定实施例的特征的描述。提供本公开的前述描述以使本领域的任何技术人员能够制作或使用本公开。对于本领域的技术人员来说,对本公开的各种修改将是显而易见的,并且本文定义的一般原理可以被施加到其它变型而不背离本公开的精神或范围。因此,本公开不旨在限于本文描述的示例和设计,而是要被赋予与本文公开的原理和新颖特征一致的最宽范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1