基于多微处理器结构的时序控制器的制作方法
[0001]
本发明涉及时序控制器,尤其涉及一种基于多微处理器结构的时序控制器。
背景技术:
[0002]
精确测定弹丸飞出炮口后200多米内自由飞行的一些参量,即弹丸的姿态角、自转速度和质心坐标等随时间的变化情况,是弹道测试的主要任务之一。对于弹丸等超高速物体照相,普通的照相手段无法成功捕捉待测物体图像。因此研制对于超高速物体的闪光成像系统时序控制器有重要的意义。
[0003]
该测试系统整体由多台照相站构成,每台照相站由区截装置、激光成像装置、工控机和时序控制器构成。区截装置由激光器阵列与光电探测器构成。激光成像装置由多台纳秒级脉冲的激光器和两台高速ccd相机构成。弹丸发射后,随即会产生炮口启动触发信号,作为整体测试系统的初始时刻点。弹丸穿过光幕引起探测器光通量改变,会产生一个变化的光电流,该电流通过转换电路和信号处理电路,会产生脉冲触发信号,作为弹丸过靶的标志,即触发靶输入信号。单片机检测到触发靶输入信号后,按照上位机通过串口传输的时序需求,产生一路输出信号,可控制一台激光器发出纳秒级宽度激光,另一路单片机可控制一台相机的快门按照时序需求打开与闭合,配合完成激光成像。相机和激光器皆可依据测试工程需求灵活扩展数量,以配合多台照相站工作。
[0004]
前期以利用fpga做时序控制核心居多。虽然在逻辑单元等资源上fpga有一定优势,但实时性相比单片机系统不够高。单片机内部多个定时器工作时不干扰cpu,且易于扩展,用于测试系统性价比较高。利用stc单片机完成时序控制器设计,工作稳定,误差较小,充分能满足系统设计需求。因此,如何利用多微处理器,按所需延时输出时序信号,是时序控制器需要解决的技术问题。
技术实现要素:
[0005]
本发明的目的在于提出一种基于多微处理器结构的时序控制器。
[0006]
实现本发明目的的技术解决方案为:一种时序控制器,利用串口通信电路接收延时参数,通过多个基于单片机的控制电路输出多路信号,包括串口通信电路、电源隔离电路和控制电路,其中串口通信电路包括232通信电路和485通信电路,232通信电路用于接收上位机的时序参数,以及通过主机回传的测量数据,485通信电路用于完成一主多从多机通信任务;电源隔离电路用于对输入信号和输出信号进行隔离设计;控制电路为多组,每组至少有两条从机电路,分别处理激光反馈输入信号、炮口启动触发信号以及触发靶输入信号,每条电路包括输入触发信号电平转换模块和输出信号电流驱动放大模块,输入触发信号电平转换模块包括差分信号转ttl信号模块和输入信号光耦隔离电路,输出信号电流驱动放大模块包括输出信号光耦隔离电路和功率放大电路。
[0007]
进一步的,所述232通信电路包括第一电容、第二电容、第三电容、第四电容、第五电容、第六电容、串口通信芯片max232ese和db9通信接口,其中第三电容分别连接
max232ese芯片的vdd引脚和max232ese芯片的vcc引脚,第五电容、第六电容一端和max232ese芯片的vcc引脚连接,另一端和地连接;第四电容一端连接至max232ese芯片vee引脚,另一端连接到地;第一电容一端连接max232ese芯片的c1+引脚,另一端连接max232ese芯片的c1-引脚,第二电容一端连接max232ese芯片的c2+引脚,一端连接max232ese芯片的c2-引脚,上位机通过db9接口连接到该模块,db9接口的2针和3针连接至max232ese的一对通信收发引脚t1out和r1in,max232ese利用另外一对通信引脚和主机单片机从机通信,max232ese芯片的t1in引脚连接至单片机从机p3.1txd引脚,max232ese芯片的r1out引脚连接至单片机从机p3.0rxd引脚。
[0008]
进一步的,所述485通信电路采用max485,主机和从机分别连接一片max485,所有单片机的txd_2和rxd_2引脚对应连接max485的ro、di信号输入引脚,由max485的a和b引脚引出经过转换后的485电平信号,各max485的ab引脚a接a,b接b环形互联,完成地址选择与数据传输功能。
[0009]
进一步的,所述电源隔离电路包括第一钽电容、第二钽电容、第三钽电容和dc/dc模块电源,第三钽电容正极一端和dc/dc模块电源的vcc1引脚连接,另一端和dc/dc模块电源的gnd1引脚连接;第一钽电容和第二钽电容的正极分别都连接至dc/dc模块电源的vcc2引脚,第一钽电容和第二钽电容的负极分别都连接至dc/dc模块电源的gnd2引脚。
[0010]
进一步的,所述输入触发信号电平转换模块包括第七电容、第八电容、第一电阻、第二电阻、第三电阻、第四电阻、电平转换芯片max485、第一光耦器件6n137s;其中电平转换芯片max485的引脚a接第四电阻,max485芯片引脚b接第四电阻的另一端;max485芯片vcc引脚和dc/dc模块电源的vcc2引脚相连,max485芯片的gnd引脚和第一电阻相连,dc/dc模块电源的gnd2引脚和max485芯片的gnd引脚第一电阻的连接点相连,芯片使能端引脚re和de短路连接后接到第一电阻的另一端;电平转换芯片max485的芯片引脚ro连接至第一光耦器件6n137s的3引脚,第一光耦器件6n137s的引脚2连接至第二电阻,第二电阻的另一端接至dc/dc模块电源的vcc2引脚;第一光耦器件6n137s的引脚7和引脚8短路连接后,接至第八电容的一端,第八电容的另一端和第一光耦器件6n137s的gnd引脚相连;第三电阻一端和第一光耦器件6n137s的引脚7与引脚8的连接点相连,另一端和第一光耦器件6n137s的6引脚连接。第一光耦器件6n137s的6引脚和第七电容的一端连接,第七电容的另一端和第一光耦器件6n137s的5引脚连接;第一光耦器件6n137s的6引脚和单片机从机的int0引脚相连。
[0011]
进一步的,所述输出信号电流驱动放大模块包括第五电阻、第六电阻、第七电阻、第一滤波电容、第二滤波电容、第三滤波电容、第四滤波电容、第五滤波电容、第二光耦器件6n137s、mos驱动器mc34151,第二光耦器件6n137s的3引脚和单片机从机的p2.6引脚相连,第二光耦器件6n137s的引脚2连接至第五电阻,第五电阻的另一端和所有单片机的vcc引脚相连;第二光耦器件6n137s的引脚7和引脚8短路连接后,和dc/dc模块电源的vcc2引脚相连;第六电阻一端和dc/dc模块电源的vcc2引脚相连,第六电阻另一端和第二光耦器件引脚6与第四滤波电容的连接点相连。第四滤波电容的另一端连接至dc/dc模块电源的gnd2引脚;第五滤波电容一端和dc/dc模块电源的vcc2引脚相连,另一端和dc/dc模块电源的gnd2引脚相连;第二光耦器件6n137s的6引脚接至mos驱动器mc34151的ina引脚,mos驱动器mc34151的gnd引脚和mos驱动器mc34151的inb引脚连接;第七电阻一端和mos驱动器mc34151的gnd引脚与mos驱动器mc34151的inb引脚的连接点相连。第七电阻另一端和dc/dc
模块电源的gnd2引脚相连;第一滤波电容、第二滤波电容和第三滤波电容并联,并联后一端和mos驱动器mc34151的outa引脚相连,并联后另一端和dc/dc模块电源的gnd2引脚相连。
[0012]
一种时序控制方法,使用上述任一项所述的时序控制器执行控制操作,包括如下步骤:
[0013]
步骤1:利用串口通信模块下载控制程序至单片机中,程序包含rs485串口通信数据传输程序,定时器时序控制与计时程序,一主双从多机通信程序;
[0014]
步骤2:控制器上电后,利用上位机界面输入特定相机延时参数和激光器延时参数,利用串口通信程序传递至各个相应单片机片上ram中保存;
[0015]
步骤3:等待输入信号触发单片机定时器,进入定时器中断并输出经过驱动电流放大后的控制信号。
[0016]
本发明与现有技术相比,其显著优点为:1)控制器能完成特性时间参数的时序控制,充分利用单片机丰富的片上资源,达到对于相机和激光器等设备的精准控制。性价比优于利用fpga进行时序设计方案。2)输出信号经过mos驱动器对信号电流进行放大,使之符合被控对象所需的驱动能力。
附图说明
[0017]
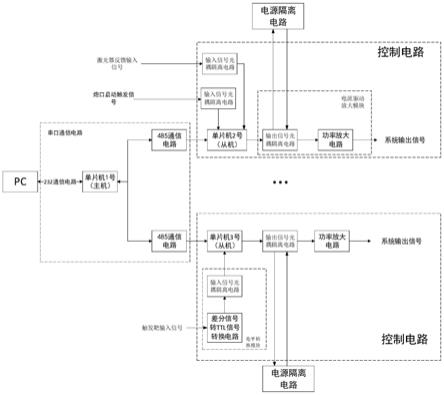
图1为本发明的控制器具体实施方式的模块示意图;
[0018]
图2为本发明用于232通信电路图;
[0019]
图3为本发明用于485通信电路图;
[0020]
图4为本发明用于电源隔离电路的电路图;
[0021]
图5本发明用于对输入触发信号进行电平转换模块单元的电路图;
[0022]
图6本发明用于对输出信号电流驱动放大的模块单元的电路图。
具体实施方式
[0023]
为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本申请进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本申请,并不用于限定本申请。
[0024]
如图1所示,本发明的时序控制器包括:串口通信电路,电源隔离电路,控制电路。该控制器可利用串口通信电路接收延时参数需求,通过多个基于单片机的控制电路构成多路系统输出信号。其中所述串口通信电路包括232通信电路和485通信电路。232通信电路用于接收上位机参数并回传测量数据,485通信电路用于完成一主多从多机通信任务。所述电源隔离电路用于对多路输入信号和多路输出信号的隔离设计,完成抗干扰要求。所述控制电路,包括输入触发信号电平转换和输出信号电流驱动放大模块。所述电平转换模块包括差分信号转ttl信号模块和输入信号光耦隔离电路;所述输出信号电流驱动放大模块包括输出信号光耦隔离电路和功率放大电路。所述控制电路可完成单片机多路输入与输出信号的调理电路。
[0025]
如图2所示,232通信电路可接收上位机参数并回传测量数据的串口通信模块。由第一电容c3、第二电容c4、第三电容c5、第四电容c6、第五电容c7、第六电容c
10
、串口通信芯片max232ese和db9通信接口。其中第三电容c5分别连接max232ese芯片的vdd和5v电气节点。
第五电容c7、第六电容c
10
并联至5v和芯片vcc引脚之间。第四电容c6两端连接至max232ese芯片vee引脚和gnd电气节点。第一电容c3一端连接max232ese芯片的c1+引脚,一端连接max232ese芯片的c1-引脚。第二电容c4一端连接max232ese芯片的c2+引脚,一端连接max232ese芯片的c2-引脚。上位机通过db9接口连接到该模块,db9接口的2针和3针连接至max232ese的一对通信收发引脚t1out和r1in。max232ese利用另外一对通信引脚和单片机主机通信,max232ese芯片的t1in引脚连接至单片机从机p3.1txd引脚,max232ese芯片的r1out引脚连接至单片机从机p3.0rxd引脚。
[0026]
如图3所示,485通信电路由max485和分压电阻组成。分压电阻依据上电需要决定,可不连接。每片单片机的txd_2和rxd_2引脚对应连接max485的ro、di信号输入引脚。由max485的a和b引脚引出经过转换后的485电平信号,分别对应连接至a+和b-电气节点。主机1号机、从机2号机和从机3号机通过三片max485的三对ab引脚a接a,b接b环形互联,完成地址选择与数据传输功能。
[0027]
如图4所示,电源隔离电路用于提供隔离电源,对多路输入信号和多路输出信号进行隔离设计,以完成抗干扰要求。电源隔离电路包括第一钽电容c
16
,第二钽电容c
20
,第三钽电容c
12
,dc/dc模块电源。第三钽电容c
12
正极一端和12v电气节点连接,另一端接外部电源地gnd1。dc/dc模块电源的输入引脚vcc1连接到12v电气节点,输入引脚gnd1连接外部电源地gnd1。输出引脚vcc2连接到激光器反馈输入信号的工作电源电气节点vcc5vin1,输出引脚gnd2连接到激光器反馈输入信号的地电气节点gndin1。第一钽电容c
16
和第二钽电容c
20
,正极分别都连接至电气节点vcc5vin1,负极分别都连接至电气节点gndin1。过滤去高频噪声和低频噪声。为三个单片机提供5v的工作电压,输出引脚vcc2连接到单片机的工作电源电气节点5v,输出引脚gnd2连接到单片机的地电气节点gnd。
[0028]
作为扩展需求,电路中可布设多个相同上述模块,器件型号和器件连接完全相同。可完成为触发靶输入信号提供12v转5v电源隔离,输出引脚vcc2连接到触发靶输入信号的工作电源电气节点vcc5vin2,输出引脚gnd2连接到触发靶输入信号号的地电气节点gndin2。
[0029]
可完成为激光器反馈输入信号提供12v转5v电源隔离,输出引脚vcc2连接到激光器反馈输入信号的工作电源电气节点vcc5vin3,输出引脚gnd2连接到激光器反馈输入信号的地电气节点gndin3。
[0030]
可完成为炮口触发信号提供12v转5v电源隔离,输出引脚vcc2连接到炮口触发信号的工作电源电气节点vcc5vin3,输出引脚gnd2连接到炮口触发信号的地电气节点gndin3。
[0031]
可完成为三个单片机提供5v的工作电压,输出引脚vcc2连接到单片机的工作电源电气节点5v,输出引脚gnd2连接到单片机的地电气节点gnd。并可为两路相机输出控制信号提供5v转5v电源隔离,为激光器与激光器调q输出信号提供5v转5v电源隔离。
[0032]
所述控制电路分为输入触发信号电平转换和输出信号电流驱动放大。所述电平转换模块包括差分信号转ttl信号模块、输入信号光耦隔离电路;所述输出信号电流驱动放大模块包括输出信号光耦隔离电路、功率放大电路。
[0033]
如图5所示,用于对输入触发信号进行电平转换的模块。由于炮口触发信号为差分信号,因此采用差分信号转ttl信号模块,后接输入信号光耦隔离电路,是信号流入单片机
引脚中。所述模块包括第七电容c
19
,第八电容c
20
,第一电阻r
17
,第二电阻r
18
,第三电阻r
19
,第四电阻r
20
,电平转换芯片max485,光耦器件6n137s。max485的芯片引脚a接炮口触发信号p2+,max485芯片引脚b接炮口触发信号p2-,该芯片引脚vcc接炮口触发信号的工作电源电气节点vcc5vin3,max485芯片引脚gnd输出引脚gnd2连接到炮口触发信号的地电气节点gndin3。max485芯片使能端引脚re和de短路连接后接到电容第一电阻r
17
,第一电阻r
17
的另一端接至炮口触发信号的地电气节点gndin3。该芯片引脚ro连接至光耦器件6n137s的引脚3,将转换后的ttl信号传递至光耦。光耦器件6n137s的引脚2连接至第二电阻r
18
,第二电阻r
18
的另一端接至接炮口触发信号的工作电源电气节点vcc5vin3。6n137s的引脚8和引脚9短路连接后,接至单片机的工作电源电气节点5v。第三电阻r
19
一端接至单片机的工作电源电气节点5v,另一端连接至光耦器件引脚6和滤波作用的第七电容c
19
的一端。第七电容c
19
的另一端连接至单片机的地电气节点gnd。第八电容c
20
一端和电气节点5v相连,另一端和电气节点gnd相连。经过差分信号转ttl信号模块,以及输入信号光耦隔离电路的最终信号从光耦器件引脚6引出,接至电气节点p32-a,该电气节点和单片机主机的p3.2int0引脚相连。
[0034]
如图6所示,用于对输出信号电流驱动放大的模块。考虑到被控对象的最小驱动电流需求,需要对单片机的输出信号进行光耦隔离和功率驱动设计。所述输出信号电流驱动放大的模块包括第五电阻r
24
,第六电阻r
25
,第七电阻r
26
,第一滤波电容c
32
,第二滤波电容c
33
,第三滤波电容c
34
,第四滤波电容c
35
,第五滤波电容c
36
,光耦器件6n137s,mos驱动器mc34151。单片机从机p2.6引脚相连至光耦器件的引脚3,该连接处电气节点为p26-b。光耦器件6n137s的引脚2连接至第五电阻r
24
,第五电阻r
24
的另一端和单片机的工作电源电气节点5v相连。光耦器件的引脚8和引脚9短路连接后,接至输出信号工作电源电气节点vcc5v-2。第六电阻r
25
一端接至输出信号工作电源电气节点vcc5v-2,另一端连接至光耦器件引脚6和第四滤波电容c
35
的一端。第四滤波电容c
35
的另一端连接至输出信号的地电气节点gnd-2。第五滤波电容c
36
一端和电气节点vcc5v-2相连,另一端和电气节点gnd-2相连。经过光耦隔离电路的输出信号从光耦器件引脚6引出,接至mos驱动器mc34151的引脚ina。第七电阻r
26
一端和mos驱动器mc34151的gnd引脚与mos驱动器mc34151的inb引脚的连接点相连。第七电阻r
26
另一端和dc/dc模块电源的gnd2引脚相连。mos驱动器mc34151的引脚gnd和inb短接并联后接至输出信号的地电气节点gnd-2。第一滤波电容c
32
、第二滤波电容c
33
和第三滤波电容c
34
,并联后一端和电气节点vcc5v-2相连,并联后另一端和电气节点gnd-2相连。最终的整个系统的输出信号为mos驱动器mc34151的outa引脚,电气节点定义为y2。
[0035]
同上描述,利用相同输出信号电流驱动放大模块,可输出多路相机控制输出信号,多路激光器控制输出信号,多路激光器调q输出信号等系统输出信号。
[0036]
作为一种具体示例,对于dc-dc模块电源电路,12v转5v需求可采用dc-dc模块电源型号为金升阳公司b1205s-1w2r,5v转5v采用dc-dc模块电源型号金升阳公司b0505s-1w2r。该系列产品是专门针对板上电源系统中需要产生一组与输入电源隔离的电压的应用场合而设计的。该产品适用于:输入电源的电压比较稳定(电压变化范围
±
10%vin);输入输出之间要求隔离(隔离电压≤1500vdc);对输出电压稳定度和输出纹波噪声要求不高。后级滤波电容选择22μf和4.7μf,分别滤去高频噪声和低频噪声。
[0037]
对于单片机控制电路,本发明选择宏晶电子公司型号为stc15w4k48s的单片机。该系列单片机内部有7个定时器,有5个16位可重装载定时器/计数器,四组异步串行口,每个
i/o口驱动能力均可达20ma。片内大容量4096字节的sram,其中常规256字节ram,内部扩展3840字节xram。采用低功耗设计,支持省略外部晶振和外部复位。
[0038]
基于上述装置的时序控制方法,包括如下步骤:
[0039]
步骤1:利用串口通信模块下载控制程序至单片机中,程序包含rs485串口通信数据传输程序,定时器时序控制与计时程序,一主双从多机通信程序;
[0040]
步骤2:控制器上电后,利用上位机界面输入特定相机延时参数和激光器延时参数,利用串口通信程序传递至各个相应单片机片上ram中保存;
[0041]
步骤3:等待输入信号触发单片机定时器,进入定时器中断并输出经过驱动电流放大后的控制信号。
[0042]
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。以上所述实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1