机器人定位充电桩的方法及系统与流程
[0001]
本发明涉及机器人技术领域,特别涉及一种机器人定位充电桩的方法及系统。
背景技术:
[0002]
服务机器人正逐步替代部分人工的工作。目前,已将机器人广泛应用于餐厅、酒店、医院、政府机构等场景中,提供配送、引导等服务。应用于上述场景中的机器人需要克服使用场地的限制,进行无轨道移动。机器人具有电源系统,当电量消耗后,需要对电源系统及时进行充电。常用的方式是,机器人自动寻找充电桩进行充电。然而,现有的自动回充方法,存在机器人对桩移动过程缓慢,对桩精度低的问题。
技术实现要素:
[0003]
本发明有鉴于上述的现有状况而完成的,其目的在于提供一种机器人定位充电桩的方法及系统,使机器人可迅速完成精确对准充电桩。
[0004]
为了实现上述目的,本发明实施方式提供如下技术方案:
[0005]
本发明提供一种机器人定位充电桩的方法,所述方法应用于机器人定位充电桩,所述机器人存储所述充电桩的特征信息,所述机器人包括激光雷达及定位模块,所述激光雷达扫描并获取激光点云,所述定位模块输出所述机器人的位姿,所述方法包括:
[0006]
计算所述特征信息的理想点云及所述理想点云的距离图;
[0007]
根据所述充电桩在世界坐标系下的位置与所述机器人在世界坐标系下的位姿,计算所述充电桩在激光坐标系下的位置信息,根据所述位置信息设定搜索范围,对所述搜索范围内的所述激光点云进行搜索;
[0008]
采用滑动窗口对所述搜索范围内的所述激光点云进行搜索以输出若干段候选点云;
[0009]
将每一段所述候选点云与所述理想点云进行粗略对齐,并采用所述距离图进行暴力搜索对齐,并输出对齐误差,选取对齐误差最小的所述激光点云为充电桩点云;
[0010]
以所述充电桩点云为初值,使用奇异值分解法对所述充电桩点云与所述理想点云进行对齐,计算所述充电桩的位姿。
[0011]
在这种情况下,基于定位模块输出的机器人的位姿及充电桩在世界坐标系下的位置进行融合来辅助确定搜索范围,既提升了充电桩点云的搜索计算效率,又提升了机器人对于充电桩的定位精度,并且基于理想点云的距离图进行对齐,可大幅减少计算量;结合粗略对齐与暴力搜索对齐,选取对齐误差最小的所述激光点云为充电桩点云,在此基础上与理想点云对齐,从而综合提升搜索准确率及效率;因此将多传感器融合于机器人识别充电桩的算法中,总体上使机器人可迅速完成精确对准充电桩。
[0012]
其中,所述滑动窗口为第一特定宽度,所述滑动窗口的间隔为第二特定宽度,所述第一特定宽度与所述第二特定宽度之和不大于所述特征长度。
[0013]
由此,并且滑动窗口搜索将搜索范围内的激光点云进行分段,在所述第一特定宽
度与所述第二特定宽度之和不大于所述特征长度约束下,确保了候选点云被理想点云所包含。
[0014]
其中,所述位置信息包括最大定位误差边界,所述设定搜索范围的步骤,具体包括:
[0015]
以所述最大定位误差边界为中心设定所述搜索范围。
[0016]
在这种情况下,搜索范围可以完全覆盖充电桩的点云,避免输出错误搜索结果。
[0017]
其中,所述特征信息至少包括反光标识和特征立体结构中的一种。
[0018]
在这种情况下,本发明涉及的机器人定位充电桩的方法具有广泛的通用性,不受充电桩特征的局限,可以根据实际使用场景灵活设定特征信息。
[0019]
其中,所述采用滑动窗口对所述搜索范围内的所述激光点云进行搜索以输出若干段候选点云的步骤之前,还包括:
[0020]
将所述激光雷达的数据在所述激光坐标系下的角度从小到大排序。
[0021]
由此,由激光数据根据激光扫描的时间顺序进行排序,避免了对各段候选点云重新进行排序,大幅降低了计算量,提升了计算效率。
[0022]
其中,所述特征信息包括凹凸结构,所述凹凸结构的长度为所述特征长度。
[0023]
由此,凹凸结构的特征识别可适用低配置的激光雷达,从而降低激光雷达的适用成本。
[0024]
其中,所述将每一段所述候选点云与所述理想点云进行粗略对齐,并采用所述距离图进行暴力搜索对齐,并输出对齐误差,选取对齐误差最小的所述激光点云为充电桩点云,具体包括:
[0025]
使用主成分分析技术将每一段所述候选点云与所述理想点云进行粗略对齐,并以所述粗略对齐结果作为初值,采用所述距离图进行暴力搜索对齐,并输出对齐误差,选取对齐误差最小的所述激光点云为充电桩点云。
[0026]
其中,所述定位模块包括里程计,所述以所述充电桩点云为初值,使用奇异值分解法对所述充电桩点云与所述理想点云进行对齐,计算所述充电桩的位姿的步骤之后,还包括:
[0027]
根据所述里程计的数据和所述充电桩的位姿,使用扩展卡尔曼滤波对所述充电桩的位姿进行跟踪。
[0028]
由此,在充电桩点云的基础上,融合里程计数据,可以有效发现误识别的充电桩的位姿,从而总体提升识别充电桩的准确性。
[0029]
其中,所述以所述充电桩点云为初值,使用奇异值分解法对所述充电桩点云与所述理想点云进行对齐,计算所述充电桩的位姿,之后还包括:
[0030]
所述机器人与所述充电桩的直线距离r为第四阈值时,根据所述充电桩的位姿,计算所述机器人到达所述充电桩的平滑轨迹并计算输出所述机器人的移动速度。
[0031]
在这种情况下,机器人在移动过程中,基于多传感器融合连续对充电桩的位置进行精确对准,并调节移动速度,可以保障机器人在靠近充电桩移动的过程中更加稳定。
[0032]
本发明还提供一种机器人识别充电桩的系统,应用如上所述的机器人定位充电桩的方法。
[0033]
根据本发明所提供的机器人定位充电桩的方法及系统,基于定位模块输出的机器
人的位姿及充电桩在世界坐标系下的位置进行融合来辅助确定搜索范围,既提升了充电桩点云的搜索计算效率,又提升了机器人对于充电桩的定位精度,并且基于理想点云的距离图进行对齐,可大幅减少计算量;结合粗略对齐与暴力搜索对齐,选取对齐误差最小的所述激光点云为充电桩点云,在此基础上与理想点云对齐,从而综合提升搜索准确率及效率;因此将多传感器融合于机器人识别充电桩的算法中,总体上使机器人可迅速完成精确对准充电桩。
附图说明
[0034]
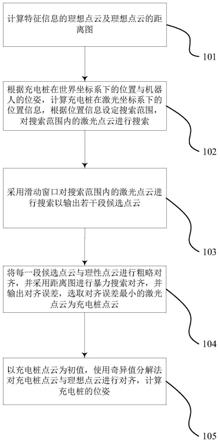
图1示出了本发明所涉及的机器人定位充电桩的方法流程示意图;
[0035]
图2示出了本发明所涉及的机器人定位充电桩的方法的反光标识的构成示意图;
[0036]
图3示出了本发明所涉及的机器人定位充电桩的方法的特征立体结构的截面示意图;
[0037]
图4示出了本发明所涉及的机器人定位充电桩的方法的特征信息的构成示意图;
[0038]
图5示出了本发明所涉及的机器人定位充电桩的方法的理想点云的构成示意图;
[0039]
图6示出了本发明所涉及的机器人定位充电桩的方法的参数示意图。
具体实施方式
[0040]
以下,参考附图,详细地说明本发明的优选实施方式。在下面的说明中,对于相同的部件赋予相同的符号,省略重复的说明。另外,附图只是示意性的图,部件相互之间的尺寸的比例或者部件的形状等可以与实际的不同。
[0041]
如图1所示,本发明实施方式涉及一种机器人定位充电桩的方法。所述方法应用于机器人定位充电桩。所述机器人存储所述充电桩的特征信息。所述机器人包括激光雷达及定位模块。所述激光雷达扫描并获取激光点云。所述定位模块输出所述机器人在世界坐标系下的位姿。所述方法包括:
[0042]
101、计算所述特征信息的理想点云及所述理想点云的距离图;
[0043]
102、根据所述充电桩在世界坐标系下的位置与所述机器人在世界坐标系下的位姿,计算所述充电桩在激光坐标系下的位置信息,根据所述位置信息设定搜索范围,对所述搜索范围内的所述激光点云进行搜索;
[0044]
103、采用滑动窗口对所述搜索范围内的所述激光点云进行搜索以输出若干段候选点云;
[0045]
104、将每一段所述候选点云与所述理想点云进行粗略对齐,并采用所述距离图进行暴力搜索对齐,并输出对齐误差,选取对齐误差最小的所述激光点云为充电桩点云;
[0046]
105、以所述充电桩点云为初值,使用奇异值分解法对所述充电桩点云与所述理想点云进行对齐,计算所述充电桩的位姿。
[0047]
在这种情况下,基于定位模块输出的机器人的位姿及充电桩在世界坐标系下的位置进行融合来辅助确定搜索范围,既提升了充电桩点云的搜索计算效率,又提升了机器人对于充电桩的定位精度,并且基于理想点云的距离图进行对齐,可大幅减少计算量;结合粗略对齐与暴力搜索对齐,选取对齐误差最小的所述激光点云为充电桩点云,在此基础上与理想点云对齐,从而综合提升搜索准确率及效率;因此将多传感器融合于机器人识别充电
桩的算法中,总体上使机器人可迅速完成精确对准充电桩。
[0048]
在一些示例中,所述特征信息的理想点云及所述理想点云的距离图经过机器人的处理器计算后预存于机器人。由此,机器人在对充电桩进行定位时,仅需调用特征信息的理想点云及所述理想点云的距离图,无需重复计算,既提升了计算效率,又提升了计算量。
[0049]
在一些示例中,所述充电桩在世界坐标系下的位置为预先设定。进一步地,所述充电桩在世界坐标系下的位置在机器人完成建图后设定。
[0050]
在一些示例中,所述充电桩在世界坐标系下的位置通过机器人建图得出。
[0051]
在一些示例中,定位模块可以包括视觉传感器、里程计、imu、红外传感器中的至少一种。
[0052]
在本实施方式中,可通过人工录入的方式将所述特征信息存入所述机器人。
[0053]
由此,当充电桩的特征信息发生变化时,只需重新录入特征信息,机器人可自动更新特征信息的理想点云及距离图,以便快速且准确地对充电桩进行搜索。
[0054]
在本实施方式中,所述滑动窗口为第一特定宽度,所述滑动窗口的间隔为第二特定宽度,所述第一特定宽度与所述第二特定宽度之和不大于所述特征长度。由此,并且滑动窗口搜索将搜索范围内的激光点云进行分段,在所述第一特定宽度与所述第二特定宽度之和不大于所述特征长度约束下,确保了候选点云被理想点云所包含。
[0055]
在本实施方式中,所述位置信息包括最大定位误差边界,所述设定搜索范围的步骤,具体包括:
[0056]
以所述最大定位误差边界为中心设定所述搜索范围。
[0057]
在这种情况下,搜索范围可以完全覆盖充电桩的点云,避免输出错误搜索结果。
[0058]
在一些示例中,优选地,搜索范围呈圆形。搜索范围也可以为矩形、多边形等其他二维形状。
[0059]
在本实施方式中,所述特征信息至少包括反光标识和特征立体结构中的一种。在这种情况下,本发明涉及的机器人定位充电桩的方法具有广泛的通用性,不受充电桩特征的局限,可以根据实际使用场景灵活设定特征信息。
[0060]
如图2所示,在一些示例中,所述特征信息包括反光标识22。所述反光标识22包括若干吸光片221和若干反光片222。所述若干吸光片221和若干反光片222呈直线排列。
[0061]
在一些示例中,所述特征信息包括凹凸结构23。凹凸结构23为特征立体结构。所述凹凸结构23的长度为所述特征长度。由此,凹凸结构的特征识别可适用低配置的激光雷达,从而降低激光雷达的适用成本。
[0062]
在一些示例中,所述凹凸结构由若干长度相等且间隔设置的凸部和凹部构成。
[0063]
如图3所示,在一些示例中,所述凹凸结构由若干长度不相等的凸部232和凹部231构成。所述凸部232和所述凹部231间隔设置。
[0064]
进一步地,所述凹凸结构朝向所述充电桩与机器人充电连接时机器人所在的方向。具体而言,充电桩的外部可以是与机器人对接充电的部分。凹凸结构可以设置于充电桩的立面。
[0065]
如图4所示,充电桩的特征信息为图3中凹凸结构的轮廓线图。具体而言,步骤101中可以采用图4中的特征信息计算理想点云(如图5),将凹凸结构的构成用线条描绘。由此可显著降低计算量。
[0066]
在本实施方式中,步骤103之前还包括:
[0067]
将所述激光雷达的数据在所述激光坐标系下的角度从小到大排序。
[0068]
由此,由激光数据根据激光扫描的时间顺序进行排序,避免了对各段候选点云重新进行排序,大幅降低了计算量,提升了计算效率。
[0069]
在本实施方式中,步骤104具体包括:
[0070]
使用主成分分析技术将每一段所述候选点云与所述理想点云进行粗略对齐,并以所述粗略对齐结果作为初值,采用所述距离图进行暴力搜索对齐,并输出对齐误差,选取对齐误差最小的所述激光点云为充电桩点云。
[0071]
在本实施方式中,所述定位模块包括里程计,步骤105之后还包括:
[0072]
根据所述里程计的数据和所述充电桩的位姿,使用扩展卡尔曼滤波对所述充电桩的位姿进行跟踪。
[0073]
由此,在充电桩点云的基础上,融合里程计数据,可以有效发现误识别的充电桩的位姿,从而总体提升识别充电桩的准确性。
[0074]
在本实施方式中,步骤105之后还包括:
[0075]
所述机器人与所述充电桩的直线距离r为第四阈值时,根据所述充电桩的位姿,计算所述机器人到达所述充电桩的平滑轨迹并计算输出所述机器人的移动速度。
[0076]
在这种情况下,机器人在移动过程中,基于多传感器融合连续对充电桩的位置进行精确对准,并调节移动速度,可以保障机器人在靠近充电桩移动的过程中更加稳定。
[0077]
图5示出了机器人10和充电桩20的位置关系。在本实施方式中,所述机器人与所述充电桩的直线距离r为第四阈值时,根据所述充电桩的位姿,计算所述机器人到达所述充电桩的平滑轨迹并计算输出所述机器人的移动速度,具体包括:
[0078]
根据公式1计算所述移动速度。公式1为:其中,v(к)为所述移动速度,r为所述机器人与所述充电桩的直线距离,к为机器人移动轨迹的曲率,v
max
为所述机器人的最大移动速度,β和λ均为常数,β>0,λ>1。
[0079]
在这种情况下,输出的移动速度可控制机器人快速、顺畅且平稳地向充电桩移动。
[0080]
在本实施方式中,直线距离r即为机器人与充电桩之间的距离。
[0081]
在本实施方式中,根据公式1计算所述移动速度,,具体包括:
[0082]
根据公式2计算к(r,θ,δ)。公式2为根据公式2计算к(r,θ,δ)。公式2为其中,k1和k2均为常数,k1>0,k2>1,δ为所述机器人正对方向与机器人-充电桩连线方向的夹角,θ为所述充电桩正对方向与所述机器人-充电桩连线方向的夹角。具体而言,所述机器人-充电桩连线方向即为机器人与充电桩共同所在直线的延伸方向。
[0083]
在本实施方式中,所述公式2,进一步包括:
[0084]
所述直线距离r为所述机器人与所述充电桩的中点的距离,δ为所述机器人正对方向与机器人-充电桩中点连线方向的夹角,θ为所述充电桩正对方向与所述机器人-充电桩中点连线方向的夹角。具体而言,所述机器人-充电桩中点连线方向,即为充电桩的中点与
机器人所在直线的延伸方向。
[0085]
由此,可以使机器人与充电桩的对位更加准确。
[0086]
本发明实施方式还涉及一种基于多传感器融合的机器人识别充电桩的系统,应用如上所述的机器人定位充电桩的方法。在这种情况下,基于定位模块输出的机器人的位姿及充电桩在世界坐标系下的位置进行融合来辅助确定搜索范围,既提升了充电桩点云的搜索计算效率,又提升了机器人对于充电桩的定位精度,并且基于理想点云的距离图进行对齐,可大幅减少计算量;并且滑动窗口搜索将搜索范围内的激光点云进行分段,在所述第一特定宽度与所述第二特定宽度之和不大于所述特征长度约束下,确保了候选点云被理想点云所包含,结合粗略对齐与暴力搜索对齐,选取对齐误差最小的所述激光点云为充电桩点云,在此基础上与理想点云对齐,从而综合提升搜索准确率及效率;因此将多传感器融合于机器人识别充电桩的算法中,总体上使机器人可迅速完成精确对准充电桩。
[0087]
以上所述的实施方式,并不构成对该技术方案保护范围的限定。任何在上述实施方式的精神和原则之内所作的修改、等同更换和改进等,均应包含在该技术方案的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1