一种摇臂重力平衡机构的制作方法
[0001]
本发明涉及机械装置操控技术领域,具体提供一种摇臂重力平衡机构。
背景技术:
[0002]
操纵杆是是机械装备领域常用的一种装置,而且操纵杆向着集成化的方向发展明显,越来越多的操控功能集成到操纵杆上,使操纵杆的重量越来越重,那么由于操纵杆自重带来如下缺陷:1、操纵杆会因为自重而向下旋转。2、向上提升操纵杆时需要克服操纵杆自重,所以比较费力,而向下推操纵杆时与操纵杆自重趋势相同,所以比较省力或不用力,甚至需要稍微向上施力阻止操纵杆向下旋转,因此导致向上提升和向下推的操纵力感不同。
[0003]
现有技术中,用扭转弹簧的扭矩去抵消操纵杆自重扭矩,因为操纵杆自重产生的向下的扭矩是正弦变化的,而扭转弹簧的扭矩是线性变化的,用一个线性变化的扭矩去抵消一个正弦变化的操纵杆自重扭矩是不可能完全抵消的;或用对称配重的方式抵消操纵杆的自重扭矩,这种方法大大增加装备的重量。本发明提出了一种可以实现操纵杆在360
°
全时平衡的技术方案,可以完美的抵消操纵杆自重扭矩。
技术实现要素:
[0004]
本发明的目的:抵消摇臂自重带来的扭矩,从而减小操纵杆向不同方向转动操纵时的力差。
[0005]
本发明的技术方案:提供一种摇臂重力平衡机构,包括底座、位置调整装置、摇臂、弹簧、轻质牵引绳和导向套;
[0006]
所述的摇臂下端通过转轴与所述底座可转动连接,使得摇臂能够以转轴轴心为圆心做摆动;
[0007]
所述轻质牵引绳一端联接到与所述摇臂的绳连接点上,另一端贯穿导向套后与所述弹簧下端联接;
[0008]
所述弹簧上端与位置调整装置固定连接;
[0009]
所述导向套下端口与所述转轴轴心的距离b等于所述绳连接点到所述转轴轴心的距离r;
[0010]
所述导向套下端口到转轴轴心的距离b小于所述轻质牵引绳长度的1/2;
[0011]
所述弹簧与导向套同轴,且轴线垂直水平面并过所述圆心
[0012]
所述位置调整装置用于调整弹簧的空间位置,使得在摇臂向上垂直于水平面时,轻质牵引绳拉直,摇臂不受轻质牵引绳拉力,弹簧仅仅承受轻质牵引绳的重力作用;
[0013]
所述弹簧的弹性系数k、摇臂的重力g、摇臂重心运动半径r
g
、所述导向套下端口与所述转轴轴心的距离b之间存在如下关系式:k=gr
g
/b2,单位n/m。
[0014]
工作原理:当摇臂3的重心在转轴轴心的正上方时力臂为零,必然是平衡状态。当摇臂3绕转轴轴心旋转了α,那么摇臂3的自重g对转轴轴心的力臂等于r
g
*sinα,所以摇臂3的自重g对转轴中心产生的扭矩等于g*r
g
*sinα,弹簧4被拉伸了2*b*sin(α/2),弹簧的刚度
系数为k,所以弹簧4的拉力等于k*2*b*sin(α/2),弹簧4的拉力对转轴中心的力臂等于b*cos(α/2),所以弹簧4的拉力对转轴中心产生的扭矩等于k*2*b*sin(α/2)*b*cos(α/2)。摇臂3的自重和弹簧4拉力产生的两个扭矩的方向相反,所以令两个扭矩大小相等既可达到平衡,即g*a*sinα=k*2*b*sin(α/2)*b*cos(α/2),将sinα=2*sin(α/2)*cos(α/2)带入前式可以求得k=gr
g
/b2,所以当弹簧4的刚度系数k=gr
g
/b2时摇臂3是平衡状态。
[0015]
当摇臂3的重心在转轴轴心的正下方时力臂为零,必然是平衡状态。
[0016]
对于本技术方案的结构来说,还可以进一步如下设置:
[0017]
进一步的,所述摇臂、底座、之间存在摩擦阻力,所述摩擦阻力大于轻质牵引绳的重力。
[0018]
进一步的,所述导向套与所述轻质牵引绳为间隙配合,所述间隙小于0.1mm。
[0019]
进一步的,所述轻质牵引绳的材质为非弹性材料。优选地的,所述轻质牵引绳材质为尼龙纤维、碳纤维或棉线。
[0020]
进一步的,所述位置调整装置相对于底座固定设置,且所述位置调整装置能够实现三坐标轴定位。
[0021]
进一步的,所述位置调整装置的安装位置与所述圆心的连线垂直于水平面,所述弹簧的另一端能够在位置调整装置上垂直上下调节。
[0022]
进一步的,所述弹簧为螺旋弹簧。
[0023]
进一步的,所述绳连接点位于所述摇臂重心与所述圆心之间。
[0024]
本发明的有益效果:弹簧拉力产生的扭矩完全抵消了摇臂自重产生的扭矩,操纵力只需克服系统摩擦,同一位置的不同方向操纵力感完全相同。
附图说明
[0025]
当结合附图阅读时,通过参考以下对本发明示例的详细描述,将最好地理解例示性示例以及优选的使用模式、其他目的及其描述,其中:
[0026]
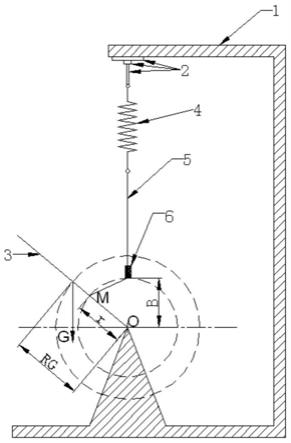
图1为本发明提供的摇臂重力平衡机构示意图;
[0027]
图2为本发明提供的摇臂重力平衡机构的平衡原理图;
[0028]
其中,1-底座,2-位置调整装置,3-摇臂,4-弹簧,5-轻质牵引绳,6-导向套,摇臂的重力g,摇臂重心运动半径r
g
,所述导向套下端口到转轴轴心的距离b,圆心o,绳连接点m,所述绳连接点到所述转轴轴心的距离r。
具体实施方式
[0029]
将参照附图更充分地描述所公开的示例,在附图中示出了所公开示例中的一些(但并非全部)。事实上,可描述许多不同的示例并且这些示例不应该被解释为限于本文中阐述的示例。相反,描述这些示例,使得本公开将是彻底和完全的,并且将把本公开的范围充分传达给本领域的技术人员。
[0030]
实施例,参见图1,提供一种摇臂重力平衡机构,包括底座、位置调整装置、摇臂、弹簧、轻质牵引绳和导向套;
[0031]
所述的摇臂下端通过转轴与所述底座可转动连接,使得摇臂能够以转轴轴心为圆心做摆动;
[0032]
所述轻质牵引绳一端联接到与所述摇臂的绳连接点上,另一端贯穿导向套后与所述弹簧下端联接;
[0033]
所述弹簧上端与位置调整装置固定连接;
[0034]
所述导向套下端口与所述转轴轴心的距离b等于所述绳连接点到所述转轴轴心的距离r;
[0035]
所述导向套下端口到转轴轴心的距离b小于所述轻质牵引绳长度的1/2;
[0036]
所述弹簧与导向套同轴,且轴线垂直水平面并过所述圆心
[0037]
所述位置调整装置用于调整弹簧的空间位置,使得在摇臂向上垂直于水平面时,轻质牵引绳拉直,摇臂不受轻质牵引绳拉力,弹簧仅仅承受轻质牵引绳的重力作用;
[0038]
所述弹簧的弹性系数k、摇臂的重力g、摇臂重心运动半径r
g
、所述导向套下端口与所述转轴轴心的距离b之间存在如下关系式:k=gr
g
/b2,单位n/m。
[0039]
所述摇臂、底座、之间存在摩擦阻力,所述摩擦阻力大于轻质牵引绳的重力。
[0040]
所述导向套与所述轻质牵引绳为间隙配合,所述间隙小于0.1mm。
[0041]
所述轻质牵引绳的材质为非弹性材料。所述轻质牵引绳材质为尼龙纤维。
[0042]
所述位置调整装置的安装位置与所述圆心的连线垂直于水平面,所述弹簧的另一端能够在位置调整装置上垂直上下调节。
[0043]
所述弹簧为螺旋弹簧。
[0044]
所述绳连接点位于所述摇臂重心与所述圆心之间。
[0045]
本文中公开的系统、装置和方法的不同示例包括各种部件、特征和功能。应当理解,本文中公开的系统、装置和方法的各种示例可包括任何组合方式或任何子组合方式的本文中公开的系统、装置和方法的其他示例中的任一个的部件、特征和功能中的任一个,并且所有这些可能性旨在落入本发明的范围内。
[0046]
已出于例示和描述的目的展示了对不同有利布置的描述,但是该描述并不旨在是排他性的或限于所公开形式的示例。许多修改形式和变化形式对于本领域的普通技术人员而言将是显而易见的。另外,不同的有利示例可描述与其他有利示例相比不同的优点。选择和描述所选择的一个示例或多个示例,以便最佳地说明示例的原理、实际应用,并且使本领域的普通技术人员能够理解本公开有进行了适于所料想特定使用的各种修改的各种示例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1