一种飞行器自动近地防撞最优控制方法与流程
1.本发明涉及航空控制技术领域,尤其是一种飞行器自动近地防撞最优控制方法,包括但不限于自动近地防撞系统、空中自动防撞系统、近地告警系统、地形感知与告警系统等具体产品。
背景技术:
2.自动近地防撞系统(auto ground collision avoidance system,简称auto-gcas)提高飞行器飞行安全性,减小可控飞行撞地事故(controlled flight into terrain,简称cfit)的航空电子系统。其核心是基于基于飞行器的动力学特性,根据飞行器当前状态信息,实时解算并预测飞行器的飞行轨迹;利用机载数字地形数据,并根据飞行器的飞行轨迹,通过地形扫描算法,实时解算出预计的撞地区域;通过撞地评估算法解算,将飞行轨迹与预计的撞地区域进行比对;在满足撞地评估阈值时,立即向飞控系统发出地面防撞的请求;在无驾驶员超控的情况下,触发飞行器改平、拉起的机动,以确保飞行安全;同时,向驾驶舱显控系统发出地面防撞的告警信息。能够在飞行员高过载意识丧失或方位迷失等极端情况下,降低cfit发生率,主要应用于高速飞行、大机动低空作战任务的飞行器。
3.auto-gcas在国内尚属于新技术,在国外已开展多年研究,并应用于战斗机的部分机型,对飞行安全起到了重要作用。美国lockheed martin航空公司是全球主要的自动近地防撞系统设备的研发生产商。最新资料表明,2019年03月美军完成了f-35战斗机的列装auto gcas的全部试验。截至目前为止,美国f-16、f-22和f-35战斗机均已配装或达到配装状态。
4.不同型号的飞行器具备的爬升性能以及最小转弯半径等性能存在着明显的差异,这些性能差异将直接影响自动近地防撞系统的规避机动轨迹的设计,以及规避机动动作指令的生成。如果在自动防撞算法中增加一定的安全阈值,则可以相对容易的保证飞行器规避地形。然而为了保证auto gcas达到较低虚警率和误警率,发挥飞行器的最大作战效能,以及利用好飞行器的机动性能,需要对auto gcas的规避逃逸机动进行最优控制。
技术实现要素:
5.本发明公开了一种飞行器自动近地防撞最优控制方法,结合飞行器的爬升能力、过载约束以及最小转弯半径等性能,通过最优控制方法,计算得到一条最优的及时有效的auto gcas规避机动轨迹。
6.本发明提供了一种飞行器自动近地防撞系统最优控制方法,包含有以下步骤,
7.步骤a:从飞行器的惯性导航系统、大气数据系统等飞行管理系统采集飞行器的当前飞行位置和飞行姿态等状态信息数据;
8.步骤b:从地形数据库提取以飞机当前位置为中心的周边一定范围内的地形数据;
9.步骤c:根据飞行器的各项参数建立飞行器的非线性运动学/动力学模型函数;
10.步骤d:根据飞行器的运动学/动力学特性以及自动近地防撞系统的规避机动要
求,建立飞行器的飞行约束函数;
11.步骤e:基于步骤a和步骤b获取的飞行器状态数据和地形数据,采用非线性运动学/动力学模型函数以及飞行约束函数,建立飞行器自动近地防撞系统最优控制的代价泛函;
12.步骤f:选用智能优化算法对步骤e代价泛函中的权重参数进行优化解算,获得最终的最优控制;
13.步骤g:将步骤f计算得到最优系数矩阵代入步骤e,解算得到最优结果的最优结果返回至飞行器的飞行控制系统,操纵飞行器按照最优控制律飞行,实现自动近地防撞系统的最优控制。
14.进一步地,所述步骤a的飞行器的当前位置和飞行姿态等状态信息数据包括了惯性导航设备、gps/北斗系统等定位系统提供的经度、纬度、航迹倾角等数据,大气数据计算机所提供的气压高度、真空速等数据;
15.进一步地,所述步骤b的地形数据库为国际通用地形数据库(jeppesen,srtm等),包含了地形的高程数据以及对应的经纬度信息。根据步骤a中获取的飞行器当前位置的经度和纬度,计算周边一定范围的经纬度变化范围,根据计算得到的经纬度变化范围从地形数据库读取对应的地形高程数据,通过对高程数据的裁剪、拼接等处理方式,生成确定范围的地形高程数据,本发明中设定为5km
×
5km的范围,用于后续步骤中。
16.进一步地,所述步骤c的飞行器的非线性运动学/动力学模型函数根据飞行器的不同,以及系统性能、计算性能等要求的不同,所建立的模型函数也将有所区别,这可以根据具体飞行器进行适应性变化。
17.进一步地,所述步骤c的通用飞行器的飞行运动模型主要有六自由度模型与三自由度模型两种,其中相较于三自由度模型,六自由度模型能够更好的反映飞行器自身姿态的变化,而本文中所述方法更关注飞行器航迹控制变化,因此,本文将采用简化的三自由度质点模型为例说明。详细的内容在具体实施方式中进一步说明。
18.其中,考虑到飞行器自动近地防撞机动的瞬时性,在建立三自由度模型函数时,基于以下三点假设:
19.a)飞行器保持当前空速不变;
20.b)飞行器不受风速等外部不确定因素影响;
21.c)飞行器仅作为质点模型,不考虑其姿态运动的变化。
22.运动学方程组如下所示:
[0023][0024][0025][0026]
动力学方程组如下所示:
[0027]
[0028][0029]
其中,上述方程组中的x,y,z为飞行器的位置信息在地理坐标系下的表示,γ为航迹倾斜角,v
t
为飞行真空速,χ为航迹方位角,μ为航迹滚转角,nz为法向过载。
[0030]
进一步地,所述步骤d的自动近地防撞系统规避机动的飞行约束函数的建立,根据自动近地防撞系统的功能特点,主要包括飞行航迹预测功能模块的预测时间约束,地形扫描功能模块的飞行器最小离地高度的距离约束,自动机动规避功能模块的飞行器的法向过载的性能约束,以及飞行器横滚机动过程中滚转角和滚转角速率的性能约束等方面。详细的内容在具体实施方式中进一步说明。
[0031]
进一步地,所述步骤e的飞行器自动近地防撞系统最优控制的代价泛函的建立,为了满足最合适的机动响应规划,本发明设计通过求解最小化的代价泛函以规划出基于可容许的控制域a内的最优控制律u
*
(t),因此,所建立的代价泛函如下所示:
[0032][0033]
进一步地,所述步骤e的代价泛函中的最优控制律u
*
(t)在本发明中主要包括航迹滚转角控制μ(t)和法向过载控制nz(t)。
[0034]
进一步地,所述步骤f的优化步骤e代价泛函中的权重参数可选用不同的智能优化算法,包括但不限于神经网络、粒子群算法、仿生算法、遗产算法等。
[0035]
进一步地,所述步骤g的最优控制结果只在自动近地防撞系统近地防撞评估功能模块发出告警信号时,才与飞行器的飞控系统自动飞行进行交联,将最优控制律发送至飞控系统,操纵飞机执行自动机动规避,实现飞行器自动近地防撞最优控制。
[0036]
本发明的飞行器自动近地防撞最优控制方法,能够在考虑飞行器性能约束及机动约束情况下,保证自动近地防撞的及时有效性,降低虚警率和误警率,充分发挥飞行器的任务效能,与飞行管理系统、飞行控制系统等机载系统相结合,全方位保障飞行器飞行安全。
附图说明
[0037]
以下将结合附图对本发明作进一步的说明。
[0038]
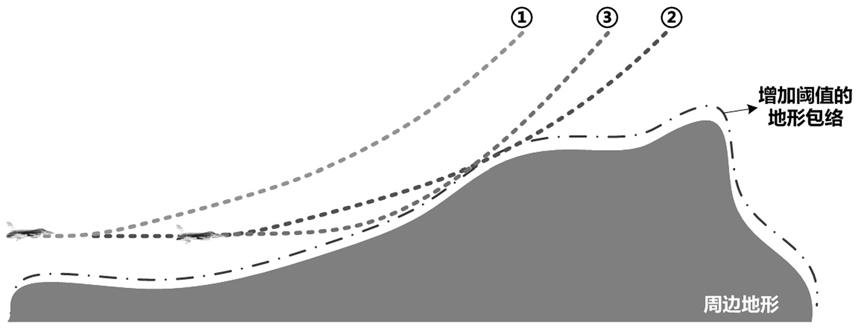
图1图示了根据本发明的实施例的自动近地防撞最优控制的机动规避路径示意图。
[0039]
图2图示了根据本发明的实施例的自动近地防撞最优控制的原理架构示意图。
具体实施方式
[0040]
以下通过较佳实施例对本发明的技术方案进行说明,但下述实施例并不能限制本发明的保护范围。
[0041]
本发明所提供的飞行器自动近地防撞最优控制方法以软件的形式内置于飞行器上的任一具有数据采集、处理,输出和存储功能的任一装置,如近地告警设备、飞行控制系统、飞行管理系统,综合环境监测系统,健康管理系统等航电或飞控设备。此外,本发明提供的飞行器自动近地防撞最优控制方法适用于任何具有近地防撞保护需求的飞行器。
[0042]
附图1为根据本发明的一个实施例形成的自动近地防撞最优控制的机动规避路径
示意图。附图1中的机动规避路径
③
为本发明所述方法的飞行器自动近地防撞最优控制规避路径;机动规避路径
①
虽然具有近地防撞有效性,却容易被飞行员判断为虚警;机动规避路径
②
在碰撞临界时间触发机动,降低了虚警,却没法保证安全有效性。
[0043]
参照附图2,从飞行器的惯性导航系统、大气数据系统等飞行管理系统采集飞行器的当前飞行位置和飞行姿态等状态信息数据,包括飞行器的当前位置信息x,y,z,航迹倾斜角γ,飞行真空速v
t
,航迹方位角χ;
[0044]
参照附图2,从地形数据库提取以飞机当前位置为中心的周边一定范围内(5km
×
5km)的地形高程数据;
[0045]
参照附图2,根据飞行器的各项参数建立飞行器的非线性运动学/动力学模型函数其中状态变量x=[x,y,z,γ,χ]
t
,控制输入u=[nz,μ]
t
,具体的关系表达式如下所示:
[0046][0047][0048][0049][0050][0051]
参照附图2,根据飞行器的运动学/动力学特性以及自动近地防撞系统的规避机动要求,建立飞行器的飞行约束函数,主要包括飞行航迹预测功能模块的预测时间约束,地形扫描功能模块的飞行器最小离地高度的距离约束,自动机动规避功能模块的飞行器的法向过载的性能约束,以及飞行器横滚机动过程中滚转角和滚转角速率的性能约束等,具体表示如下所示。
[0052]
滚转角控制的约束函数μ(t):
[0053]
μ
min
≤μ(t)≤μ
max
[0054]
法向过载的约束函数nz(t):
[0055]
1g≤nz(t)≤c
·
nz
max
[0056]
其中c代表权重系数,取值根据飞行器的飞行特性和飞行员的承压能力变化,取值范围为(0,1),nz
max
为飞行器设计的最大过载。
[0057]
参照附图2,基于步骤a和步骤b获取的飞行器状态数据和地形数据,采用飞行器模型函数以及飞行约束函数,建立飞行器自动近地防撞系统最优控制的代价泛函j:
[0058][0059]
其中,r为飞行控制的权重系数矩阵,可表示为
[0060][0061]
参照附图2,选用智能优化算法对步骤e代价泛函中的权重系数矩阵r的系数进行优化解算,获得最终的最优控制;
[0062]
参照附图2,将步骤f计算得到最优系数矩阵代入步骤e,解算得到最优结果返回至飞行器的飞行控制系统。
[0063]
参照附图2,根据飞行控制系统的控制指令操纵飞行器按照最优控制律飞行,实现自动近地防撞系统的最优控制。
[0064]
值得说明的是,上述描述是基于发明的具体实施例而进行的,尽管参照较佳实施例在本发明进行了详细描述,但本领域的技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1