PID模糊控制的自适应激光器功率稳定技术的制作方法
pid模糊控制的自适应激光器功率稳定技术
技术领域
[0001]
本发明涉及pid技术领域,具体为pid模糊控制的自适应激光器功率稳定技术。
背景技术:
[0002]
激光器广泛应用于科学研究,如量子通信,原子冷却,原子钟,原子干涉仪等。其功率稳定性非常重要,特别是在量子精密测量领域,激光器的功率稳定性直接影响实验测量精度。因此,对激光器实施功率稳定是非常有必要的。比例-积分-微分(pid)控制作为成熟的控制方法,已广泛应用于各种闭环控制系统中,如温度控制,飞行姿态调整控制等。将模拟pid应用于激光功率稳定,其通过模拟电路的方法来实现闭环控制,这种功率稳定方案在实验过程中不允许调整激光的功率,这对于一些需要实时改变激光器光强的实验并不适用。
[0003]
目前,传统的模拟pid控制环路通常在特定环境下通过调整参数来优化反馈效果,而当外部环境发生变化时,之前的参数并不能达到最优的控制效果,为此,我们提出pid模糊控制的自适应激光器功率稳定技术。
技术实现要素:
[0004]
针对现有技术的不足,本发明提供了pid模糊控制的自适应激光器功率稳定技术,解决了上述背景技术中提出的现有目前,传统的模拟pid控制环路通常在特定环境下通过调整参数来优化反馈效果,而当外部环境发生变化时,之前的参数并不能达到最优的控制效果的问题。
[0005]
为实现以上目的,本发明通过以下技术方案予以实现pid模糊控制的自适应激光器功率稳定技术,包括以下步骤:(1)激光通过aom后产生衍射光;(2)激光进入光电管;(3)进入数字信号处理器(dsp);(4)加载到压控振荡器(vco)的调幅端。
[0006]
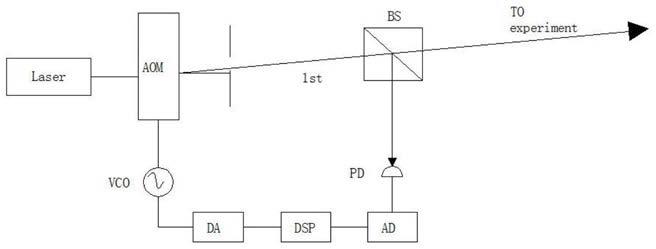
可选的,所述pid模糊控制的自适应激光器功率稳定技术包括以下具体步骤:(1)激光通过aom后产生衍射光调整光阑只允许+1级衍射光通过,再经过分光棱镜(bs)后被分成两束,一束进入光电管(pd),另一束用作后续的物理实验;(2)激光进入光电管光信号转换成电压信号,经过模数转换器(ad)转换成数字信号;(3)进入数字信号处理器(dsp)然后进入数字信号处理器(dsp),进行运算处理,计算结果通过数模转换器(da)转换成模拟电压信号后;(4)加载到压控振荡器(vco)的调幅端
对aom的衍射效率进行调节,最终实验功率稳定。
[0007]
可选的,所述dsp具有高速数据运算能力,能够对激光器的功率变化进行实时反馈,以及dsp中模糊自适应pid的算法,由于增量式pid相较与位置式pid有着占用内存空间小,且不会出现积分饱和过深的问题,采用位置式pid,其离散形式如下:, (1)其中,k为反馈循环次数,e(k) = s(k)
ꢀ-ꢀ
y(k)为光电管探测电压y(k)与设定电压s(k)在第k次循环时的差值;可选的,所述选用的dsp、ad、da、参考电压芯片的型号分别为tms320f28335、ltc2367-18、ad5781、lt6657-5;其中,pd input为反馈环路内光电管的电压,to aom端口接到aom驱动的调幅端;光电管电压先经过一个低通滤波器后进入跟随器,之后再经过二次滤波进入ad转换器;可选的,所述具体的模数转换过程如下:先由tms320f28335的管脚gpio58发送一个高脉冲到达ltc2367-18的cnv管脚,开始da芯片,最终通过ad5781的out端口经由电压跟随器输出到aom驱动的调幅端;光电管电压先经过一个低通滤波器后进入跟随器,之后再经过二次滤波进入ad转换器。
[0008]
可选的,所述具体的模数转换过程如下:先由tms320f28335的管脚gpio58发送一个高脉冲到达ltc2367-18的cnv管脚,开始转换,在此期间busy端口会被拉高,当转换完成后会自动变换低电平,因此可通过检测gpio57的电压得知转换是否完成,之后再由ltc2367-18的sdo端口将转换结果传给dsp,做进一步的算法处理。
[0009]
可选的,所述数据经过模糊控制器以及pid处理后的结果通过spisimo端口传给da芯片,最终通过ad5781的out端口经由电压跟随器输出到aom驱动的调幅端。
[0010]
本发明提供了pid模糊控制的自适应激光器功率稳定技术,具备以下有益效果:该pid模糊控制的自适应激光器功率稳定技术,采用嵌入式技术,将模糊控制应用于激光功率稳定,通过反馈aom的调幅电压改变激光的衍射效率,进而实现激光的功率稳定;与传统的pid相比,加入模糊控制之后,反馈环路从闭合到稳定的过程中不会出现超调所导致的振荡,环路稳定所需要的时间从4.7ms缩短至1.8ms;功率稳定后,激光相对强度噪声的功率谱密度在低频部分得到了很大改善,在1hz处被压低了22db,并且在很宽的频率范围内,都低于-110dbc/hz,能够满足实验要求,时域测量结果表明,激光功率在3小时内的相对起伏从0.29%改善至0.035%,该功率稳定度技术对于提高量子精密测量的测量精度有重要意义。
[0011]
采用的参考电压芯片为lt6657-5,其输出标准的5v电压作为ad芯片(ltc2367-18)基准电压,而da芯片(ad5781)需要正负参考电压,通过一个电压反向器得到-5v并连接至refns端口;参考电压的稳定性会直接影响功率稳定的性能,因此需要测试最终输出端口(to aom)的电压稳定性(见实验结果与分析部分);激光功率稳定的设定电压为3.5v,使用传统pid与模糊pid实现激光器功率稳定的实验结果对比。纵轴的pd电压为反馈环路内的光电管电压,通过监测该点电压可以得到环路从闭合到稳定所需要的时间。红色曲线为典型的pid控制曲线,可以看出,激光器功率在设定点附近做振幅逐渐减小的振动,由于超调的原因,经过大约4.7ms后激光的功率达到稳定;黑色的曲线为模糊pid的控制结果,由于其根据系统所处状态实时控制pid的三个参数,可以看出在稳定过程中基本没有超调,并且从环路闭合到稳定所需的时间缩短至1.8ms;
将光电管置于bs后用于实验的光路上,测试环路外功率稳定的性能;环路外激光相对强度噪声的功率谱密度,黑色实线和红色实线分别为无功率稳定和有功率稳定时激光的相对强度噪声,而灰色实线为da输出固定电压时的相对强度噪声;在1 hz处激光相对强度噪声从-88dbc/hz被压低到-110dbc/hz,在10hz处从-93dbc/hz压低到-110dbc/hz;在1hz到40hz范围内,有明显改善,对于更高频的部分由于ad前滤波器带宽的选择以及光电管带宽的等原因,功率稳定前后激光的相对强度噪声相当,但都小于-110dbc/hz,满足实验要求;灰色实线在10 khz 的频率范围内处于红色实线之下,说明选择的参考电压芯片以及da芯片能够满足功率稳定的需求;从时域上来来看,激光功率的稳定性可以通过监测环路外功率的变化来获得,给出了功率稳定前后,环路外激光器3小时光功率的变化情况。定义功率相对起伏如下:,
ꢀꢀ
(2)即激光功率的变化量与其平均值的比值。无功率稳定时激光器功率随时间飘移,并且短时间内的浮动也很大;经过功率稳定后,激光功率基本稳定在5.745mw,其相对起伏从0.29%改善至0.035%。
附图说明
[0012]
图1为本发明激光功率稳定实验装置示意图;图2为本发明模糊pid算法流程示意图;图3为本发明功率稳定电路简略示意图;图4为本发明反馈环路的稳定过程示意图;图5为本发明环路外探测光相对强度噪声的功率谱密度示意图;图6为本发明激光功率三小时内的变化示意图。
具体实施方式
[0013]
下面将结合本发明的具体实施例和附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
[0014]
pid模糊控制的自适应激光器功率稳定技术,包括以下步骤:(1)激光通过aom后产生衍射光;(2)激光进入光电管;(3)进入数字信号处理器(dsp);(4)加载到压控振荡器(vco)的调幅端。
[0015]
pid模糊控制的自适应激光器功率稳定技术包括以下具体步骤:(1)激光通过aom后产生衍射光调整光阑只允许+1级衍射光通过,再经过分光棱镜(bs)后被分成两束,一束进入光电管(pd),另一束用作后续的物理实验;(2)激光进入光电管光信号转换成电压信号,经过模数转换器(ad)转换成数字信号;(3)进入数字信号处理器(dsp)
然后进入数字信号处理器(dsp),进行运算处理,计算结果通过数模转换器(da)转换成模拟电压信号后;(4)加载到压控振荡器(vco)的调幅端对aom的衍射效率进行调节,最终实验功率稳定。
[0016]
dsp具有高速数据运算能力,能够对激光器的功率变化进行实时反馈,以及dsp中模糊自适应pid的算法,由于增量式pid相较与位置式pid有着占用内存空间小,且不会出现积分饱和过深的问题,采用位置式pid,其离散形式如下:, (1)其中,k为反馈循环次数,e(k) = s(k)
ꢀ-ꢀ
y(k)为光电管探测电压y(k)与设定电压s(k)在第k次循环时的差值;选用的dsp、ad、da、参考电压芯片的型号分别为tms320f28335、ltc2367-18、ad5781、lt6657-5;其中,pd input为反馈环路内光电管的电压,to aom端口接到aom驱动的调幅端;光电管电压先经过一个低通滤波器后进入跟随器,之后再经过二次滤波进入ad转换器;具体的模数转换过程如下:先由tms320f28335的管脚gpio58发送一个高脉冲到达ltc2367-18的cnv管脚,开始da芯片,最终通过ad5781的out端口经由电压跟随器输出到aom驱动的调幅端;光电管电压先经过一个低通滤波器后进入跟随器,之后再经过二次滤波进入ad转换器。
[0017]
具体的模数转换过程如下:先由tms320f28335的管脚gpio58发送一个高脉冲到达ltc2367-18的cnv管脚,开始转换,在此期间busy端口会被拉高,当转换完成后会自动变换低电平,因此可通过检测gpio57的电压得知转换是否完成,之后再由ltc2367-18的sdo端口将转换结果传给dsp,做进一步的算法处理。
[0018]
数据经过模糊控制器以及pid处理后的结果通过spisimo端口传给da芯片,最终通过ad5781的out端口经由电压跟随器输出到aom驱动的调幅端。
[0019]
综上所述,该pid模糊控制的自适应激光器功率稳定技术,使用时pid模糊控制的自适应激光器功率稳定技术包括以下具体步骤:(1)激光通过aom后产生衍射光:调整光阑只允许+1级衍射光通过,再经过分光棱镜(bs)后被分成两束,一束进入光电管(pd),另一束用作后续的物理实验;(2)激光进入光电管:光信号转换成电压信号,经过模数转换器(ad)转换成数字信号;(3)进入数字信号处理器(dsp):然后进入数字信号处理器(dsp),进行运算处理,计算结果通过数模转换器(da)转换成模拟电压信号后;(4)加载到压控振荡器(vco)的调幅端:对aom的衍射效率进行调节,最终实验功率稳定。
[0020]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1