一种基于可试验数字孪生体的PLC程序设计方法与流程
一种基于可试验数字孪生体的plc程序设计方法
技术领域
[0001]
本发明属于控制设计、虚拟调试技术领域,尤其涉及一种基于可试验数字孪生体的plc程序设计方法。
背景技术:
[0002]
数字孪生是一种能够在虚拟空间中实现对物理空间对象镜像,具有忠实映射、高保真度特性的技术手段,将其应用于车间中可实现对物理车间的实时同步感知,及时发现物理车间中的问题并改进。可试验数字孪生体是仿真技术与数字孪生技术的结合,可在虚拟空间中对不同的应用场景进行仿真,将其应用于车间的设计阶段可对设计方案进行重复仿真验证,提高设计效率,缩短设计周期。
[0003]
数字孪生技术目前已应用于制造车间生产线的设计与优化。如中国专利文献cn111046589a公开了一种智能产线可试验数字孪生体建模方法,该方法通过对智能虚拟产线进行仿真,得到仿真节拍最小的运动路径用于构建智能物理产线,再根据智能虚拟产线的仿真过程设置plc控制逻辑方案,并对其进行验证修改以完成智能产线可试验数字孪生体的构建。再如中国专利文献cn111061232a公开了基于数字孪生的生产线设计与优化方法,该发明按照要素、行为、规则三个层面构建数字孪生模型,建立了虚拟生产线模型以及虚拟生产线与物理生产线的虚实映射与交互机制,可实现虚拟生产线的虚拟调试与仿真运行,避免设计风险,节省设计时间。上述专利文献的重点在于生产线设计与优化的整体方案上,未对方案实施中部分过程的实现方法进行详细描述,具体可总结为以下两个方面:
[0004]
(1)缺乏具体、规范的逻辑模型构建方法。对于复杂的系统,其运行控制逻辑较为复杂,直接构建相应的逻辑模型非常困难,且逻辑模型构建过程中的出错率非常高,难以判断错误的位置;
[0005]
(2)缺少规范的plc程序设计方法。手动设计plc程序的错误率较高,并且需要使用大量的时间,对于缩短设计时间方面非常不利。
技术实现要素:
[0006]
针对上述存在的问题,本发明提供一种基于可试验数字孪生体的plc程序设计方法。
[0007]
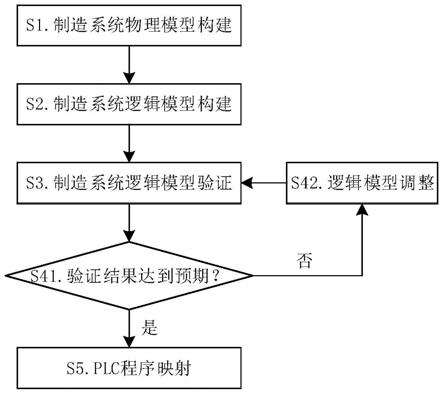
本发明的一种基于可试验数字孪生体的plc程序设计方法,具体步骤如下:
[0008]
s1.制造系统物理模型构建:
[0009]
针对系统中参与生产制造的设备,从几何特征、运动属性与接口多个维度构建设备的高保真度物理模型,将设备物理模型在虚拟空间中排列布局,完成系统物理模型的构建。
[0010]
s2.制造系统逻辑模型构建:
[0011]
将制造系统分为设备、单元以及系统三个层次,从不同层次依次构建制造系统逻辑模型;其中单元在单元层逻辑模型构建过程中视为一个子系统,在系统层逻辑模型构建
过程中视为一个设备。
[0012]
制造系统逻辑模型基于扩展devs构建。扩展devs的代数规范为e_fms=<x,y,s,δ
int
,δ
ext
,λ
a
,λ
d
,λ
m
,λ
c
,t
a
>,其中x是输入事件集(x
i
以事件值为输入,以事件值的变化为输入,x
i
,x
j
∈x),y是输出事件集,s是顺序状态集,δ
int
是内部转移函数,δ
ext
是外部转移函数,λ
a
是到达某状态时的输出函数,λ
d
是偏离某状态时的输出函数,λ
m
是经过一定时间后的输出函数,λ
c
是出现一定次数时的输出函数,t
a
是时间推进函数。其中λ
c
为本发明新增的一类输出函数,用于描述某个状态或事件出现一定次数时的系统响应,如传感器检测到3个产品到达时(即传感器信号触发三次)将产品装箱。
[0013]
s3.制造系统逻辑模型验证:
[0014]
逻辑模型通过步骤s1中的接口与物理模型连接,各层次逻辑模型依次连接,通过运行仿真逻辑模型驱动物理模型进行生产动作仿真。
[0015]
s4.判断物理模型生产动作是否与预期的仿真结果相同,若是,执行步骤s5,否则,进行逻辑模型调整,返回步骤s3。
[0016]
s5.plc程序映射,包括plc位地址的映射与plc程序段的映射。建立逻辑模型到plc梯形图程序的映射规则,实现plc梯形图程序的快速设计,具体的映射规则如下:
[0017]
(1)plc位地址映射:控制模型的输入、输出与输出模型的输出、输入一一对应,分别映射到输入映像存储区(i)与位存储器(m),控制模型的状态映射到位存储器(m),输出模型中描述活动开始的状态映射到输出映像存储区(q)。
[0018]
(2)plc程序段映射:控制模型的一个状态转移中,转移前的状态映射为常开触点与复位指令,分别与左母线和右母线连接,转移后的状态映射为置位指令与右母线连接;输出函数λ
a
、λ
d
根据函数值映射为置位指令或复位指令与右母线连接;外部转移函数的函数输入为输入事件的组合,输入事件x
i
根据条件值(“0”或“1”)映射为常开触点或常闭触点,根据条件值(“0”或“1”)映射为触点负跳沿检测指令或触点正跳沿检测指令,映射结果根据输入事件的逻辑关系(“&”或“||”)串联或并联连接,并与上述已与左母线和右母线连接的部分串联连接。输出模型的一个外部状态转移中,转移后的状态映射为输出线圈与右母线连接,外部转移函数中的输入事件根据条件值(“0”或“1”)映射为常开触点或常闭触点与左母线连接,上述两部分串联连接。
[0019]
进一步的,制造系统物理模型构建具体为:首先使用三维实体造型软件构建制造系统中设备的数字化模型,并将其转换为仿真软件可识别的格式,然后依次判断设备是否为动态设备,若是,则先根据设备的装配关系在仿真软件中建立层级拓扑关系,再针对每个层级设置其行为属性、接口,最后将设备数字化模型按层级关系导入仿真软件;若否,则直接将设备数字化模型导入仿真软件。
[0020]
进一步的,制造系统逻辑模型构建具体为:首先确定建模对象的基本活动,然后确定建模对象的基本组成元素,再确定元素的基本活动,之后根据元素的基本活动构建逻辑模型的输出模型,再之后根据建模对象基本活动与元素基本活动构建逻辑模型的控制模型,最后根据输入输出关系构建控制模型与输出模型的耦合模型,完成逻辑模型的构建。
[0021]
进一步的,plc位地址映射的具体步骤如下:
[0022]
s511.选择控制模型中的集合;
[0023]
s512.将步骤s511中各集合的元素根据规则映射为不同的plc位地址,输入事件集的元素映射到plc输入映像存储区,输出事件集与顺序状态集的元素映射到plc位存储器;
[0024]
s513.选择输出模型顺序状态集中描述活动开始的状态;
[0025]
s514.将步骤s513中描述活动开始的状态映射到plc输出映像存储区;
[0026]
进一步的,plc程序段映射的具体步骤如下:
[0027]
s521.选择控制模型外部转移函数与输出函数;
[0028]
s522.映射为plc程序指令,将步骤s521中的外部转移函数与输出函数映射为不同的plc梯形图程序指令;
[0029]
s523.生成plc控制程序段,将步骤s522中的程序指令根据逻辑关系组合,生成完整的程序段;
[0030]
s524.选择输出模型中的外部转移函数。
[0031]
s525.映射为plc程序指令,将步骤s524中的外部转移函数映射为不同的plc梯形图程序指令;
[0032]
s526.生成输出程序段,将步骤s525中的程序指令根据逻辑关系组合,生成完整的程序段。
[0033]
本发明的有益技术效果如下:
[0034]
a、本发明对devs进行扩展,并将其用于逻辑模型的构建,使得逻辑模型在描述系统运行逻辑方面更加全面,且从不同层级依次构建逻辑模型,简化了逻辑模型的构建过程,降低了逻辑模型的复杂程度;
[0035]
b、本发明将逻辑模型映射为plc程序梯形图,并给出了明确的映射规则,通过构建逻辑模型并对其进行验证后,可快速生成可靠的plc梯形图程序,降低了plc程序设计的难度。
附图说明
[0036]
图1为本发明的总体流程图;
[0037]
图2为本发明的设备物理模型的构建流程图;
[0038]
图3为本发明的制造系统逻辑模型的构建流程图;
[0039]
图4为本发明的plc位地址映射流程图;
[0040]
图5为本发明的plc程序段映射流程图;
[0041]
图6为本发明的某柔性制造系统;
[0042]
图7为本发明的设备逻辑模型中的输出模型实例;
[0043]
图8为本发明的设备逻辑模型中的控制模型实例;
[0044]
图9为本发明的plc位地址映射结果实例;
[0045]
图10为本发明的plc控制程序段映射结果实例;
[0046]
图11为本发明的plc输出程序段映射结果实例。
具体实施方式
[0047]
下面结合附图和具体实施例对本发明做进一步说明:
[0048]
本发明提供了一种基于可试验数字孪生体的plc程序设计方法,图1为该方法的流
程图,具体步骤如下:
[0049]
s1.制造系统物理模型构建:图2为物理模型构建流程,首先使用三维实体造型软件构建制造系统中设备的数字化模型,并将其转换为仿真软件可识别的格式,然后依次判断设备是否为动态设备,若是,则先根据设备的装配关系在仿真软件中建立层级拓扑关系,再针对每个层级设置其行为属性、接口,最后将设备数字化模型按层级关系导入仿真软件;若否,则直接将设备数字化模型导入仿真软件。
[0050]
s2.制造系统逻辑模型构建:图3为逻辑模型构建流程,首先确定建模对象(设备、单元或系统)的基本活动,然后确定建模对象的基本组成元素,再确定元素的基本活动,之后根据元素的基本活动构建逻辑模型的输出模型,再之后根据建模对象基本活动与元素基本活动构建逻辑模型的控制模型,最后根据输入输出关系构建控制模型与输出模型的耦合模型,完成逻辑模型的构建。
[0051]
s3.制造系统逻辑模型验证:将步骤s2中的逻辑模型在基于devs++与osg开发的仿真软件中进行实现,并与物理模型绑定,通过运行仿真验证逻辑模型。
[0052]
s4.判断物理模型生产动作是否与预期的仿真结果相同,若是,执行步骤s5,否则,进行逻辑模型调整,返回步骤s3。其中预期的仿真结果是指设备运动以及设备运动之间的执行顺序准确。
[0053]
s5.plc程序映射:图4为plc位地址映射的流程图,图5为plc程序段映射流程图,具体的步骤如下:
[0054]
(1)plc位地址映射的具体步骤如下:
[0055]
步骤1:选择控制模型中的集合;
[0056]
步骤2:将步骤1中各集合的元素根据规则映射为不同的plc位地址,输入事件集的元素映射到plc输入映像存储区,输出事件集与顺序状态集的元素映射到plc位存储器;
[0057]
步骤3:选择输出模型顺序状态集中描述活动开始的状态;
[0058]
步骤4:将步骤3中描述活动开始的状态映射到plc输出映像存储区。
[0059]
(2)plc程序段映射的具体步骤如下:
[0060]
步骤1:选择控制模型外部转移函数与输出函数;
[0061]
步骤2:映射为plc程序指令,将步骤1中的外部转移函数与输出函数映射为不同的plc梯形图程序指令;
[0062]
步骤3:生成plc控制程序段,将步骤2中的程序指令根据逻辑关系组合,生成完整的程序段;
[0063]
步骤4:选择输出模型中的外部转移函数。
[0064]
步骤5:映射为plc程序指令,将步骤4中的外部转移函数映射为不同的plc梯形图程序指令;
[0065]
步骤6:生成输出程序段,将步骤5中的程序指令根据逻辑关系组合,生成完整的程序段。
[0066]
实施例:
[0067]
s1.制造系统物理模型构建,图6为某柔性制造系统,该系统中的动态设备包括堆垛机、气动夹臂、雕刻机、机械手、激光打标机以及滚筒线等,需根据层级拓扑关系构建物理模型,其余设备为静态设备。
[0068]
s2.制造系统逻辑模型构建,首先确定气动夹臂的基本活动,包括“将工件移出工位”与“将工件移入工位”,将工件移出工位的活动过程为“松开->下降->夹紧->上升->移出工位->下降->松开->上升->夹紧->移入工位”,将工件移入工位的活动过程为“移出工位->松开->下降->夹紧->上升->移入工位->下降->松开->上升->夹紧”;然后确定气动夹臂的基本组成元素,包括水平移动臂、竖直移动臂与抓手;再确定元素的基本活动,水平移动臂包括“移出工位”、“移入工位”,竖直移动臂包括“上升”、“下降”,抓手包括“夹紧”、“松开”;之后根据元素的基本活动构建逻辑模型的输出模型,图7是根据水平移动臂、竖直移动臂与抓手的基本活动构建的3个输出模型;再之后根据建模对象基本活动与元素基本活动构建逻辑模型的控制模型,图8是根据气动夹臂中“将工件移入工位”构建的控制模型;最后根据输入输出关系构建控制模型与输出模型的耦合模型,完成逻辑模型的构建。
[0069]
s3.制造系统逻辑模型验证:将步骤s2中的逻辑模型在基于devs++与osg开发的仿真软件中进行实现,并与物理模型绑定,通过运行仿真验证逻辑模型。
[0070]
s4.判断物理模型生产动作是否与预期的仿真结果相同,若是,执行步骤s5,否则,进行逻辑模型调整,返回步骤s3。其中预期的仿真结果是指设备运动以及设备运动之间的执行顺序准确。
[0071]
s5.plc程序映射:
[0072]
(1)plc位地址映射如下:
[0073]
步骤1:选择控制模型中的集合,图8中控制模型的输入事件集元素有b_movein、d_gmi、d_gmo、d_gr、d_gd、d_go、d_gc,输出事件集元素有s_gmi、s_gmo、s_gr、s_gd、s_go、s_gc,顺序状态集元素有gmi、gmo、gr、gd、go、gc;
[0074]
步骤2:将步骤1中各集合的元素根据规则映射为不同的plc位地址,映射结果如图9所示;
[0075]
步骤3:选择输出模型顺序状态集中描述活动开始的状态,图7的输出模型中描述活动开始的状态有startgmi、startgmo、startgr、startgd、startgo、startgc;
[0076]
步骤4:将步骤3中描述活动开始的状态映射到plc输出映像存储区,映射结果如图9所示。
[0077]
(2)plc程序段映射如下:
[0078]
步骤1:选择控制模型外部转移函数与输出函数,图8中的控制模型包括10个外部转移函数,每个外部转移函数对应2个输出函数;
[0079]
步骤2:映射为程序指令,将步骤1中的外部转移函数与输出函数映射为不同的plc梯形图程序指令;
[0080]
步骤3:生成控制程序段,将步骤2中的程序指令根据逻辑关系组合,生成完整的程序段,结果如图10所示;
[0081]
步骤4:选择输出模型中的外部转移函数,图7中的输出模型包括6个外部转移函数。
[0082]
步骤5:映射为程序指令,将步骤4中的外部转移函数映射为不同的plc梯形图程序指令;
[0083]
步骤6:生成输出程序段,将步骤5中的程序指令根据逻辑关系组合,生成完整的程序段,结果如图11所示;
[0084]
以上实施例仅对本发明的方法进行解释、说明,而非对其进行限制。凡是参照该实施例进行的修改和变更的行为,均在本申请的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1