一种用于配电网人机协同巡检的作业方法与流程
1.本发明涉及配电网设备巡检领域,具体涉及一种用于配电网人机协同巡检的作业方法。
背景技术:
2.在配电网设备巡检作业中,需保证人员到位,现场记录巡检信息,判断设备是否有安全隐患。通过纸质或者电子设备保证巡检到位和巡检信息的完整记录是目前采取最为广泛的方法。人工巡检,主要有以下几个缺点:第一,需要人工逐一走到设备附近,花费时间非常多,效率非常低下。第二,人工巡检收集的信息不完整、不准确,比如杆塔顶端设备在杆塔下部拍摄的图片就无法准确完整反映设备的实时状况。第三,人工记录的信息不标准不规范,不利于历史数据的整理和分析,无法更好的为线路安全运行做出更多的辅助提升。第四,纯无人机巡检对人工技术要求高,不利于大范围的使用。第五,配电网网络往往覆盖于居民居住区域,区域地形复杂,在满足巡检要求同时,一般无人机飞行方式无法使用。
技术实现要素:
3.本发明所要解决的技术问题是:人工巡检的花费时间非常多,效率非常低下,本发明提供了解决上述问题的一种用于配电网人机协同巡检的作业方法。
4.本发明通过下述技术方案实现:
5.一种用于配电网人机协同巡检的作业方法,包括如下步骤:
6.a、对无人机下发巡检任务,巡检任务包括巡检航线、坐标点;
7.b、无人机接收巡检任务,依据无人机数量和区域,进行巡检任务;
8.c、无人机上配置的相机实时传输巡检航线上数据,配电网巡检管理平台通过数据计算巡检对象的高度、角度,得到巡检对象的图像信息;
9.d、无人机监测巡检航线上的巡检对象的周边环境图片,并发至巡检管理平台判断是否影响无人机飞行,巡检管理平台自动分析并规划影响区域并发送至移动终端与无人机,工作人员持移动终端到达巡检区域,视察影响区域人工携带巡检对象进入影响区域,并设置新的区域巡检任务至无人机、巡检管理平台共享,无人机依据新的区域巡检任务进行巡检并执行步骤c后执行步骤e;
10.e、人工巡检步骤d中无人机在新的区域巡检任务中仍无法巡检的影响区域,并通过移动终端记录数据并发送至巡检管理平台。
11.进一步地,其中无人机上配置的相机数据包括录像数据、拍摄图片,还包括无人机相机数据传输时刻在传输时刻的无人机gps坐标数据。
12.进一步地,还包括f、巡检管理平台组合无人机巡检数据和人工巡检数据,并分析巡检数据对应设备是否存在安全运行隐患。
13.进一步地,步骤d还包括无人机在影响区域外侧观测环境并分析降落区域,无人机还将分析的降落区域与实际的降落点、降落时间、降落路径发送至巡检管理平台和移动终
端共享,移动终端依据降落路径、实际的降落点回收无人机。
14.进一步地,还包括巡检管理平台实时监测无人机的电池余量,分析无人机的续航能力,并将相关数据和无人机编号对应发送至移动终端。
15.进一步地,巡检管理平台预先载入待巡检任务的配电网络拓扑结构并标定待巡检设备,载入巡检设备信息和巡检内容,再依据无人机所在区域和无人机数量划分巡检任务,当无人机数量为一时,为单条巡检任务,巡检航线为连续的巡检航线;
16.当可用无人机数量大于一时,对巡检任务进行划分,将总的巡检航线分段发送至相应的无人机,还发送巡检任务至移动终端。
17.进一步地,还包括移动终端通过人工判断巡检任务的合理性,进行巡检任务干预,干预内容包括暂停巡检任务,重划分巡检任务;
18.暂停巡检任务,无人机寻找降落区域;
19.重划分巡检任务,人工圈定限制区域与修改航线内容至巡检管理平台,巡检管理平台依据移动终端内容再次分析巡检任务,分配符合移动终端人工要求的巡检任务。
20.本发明具有如下的优点和有益效果:
21.本发明兼顾人工巡视适应区域广和无人机巡视效率高的优点,更好的发现线路运行安全隐患。并且此种作业方式,还解决了无人机人工操作技能要求高,人工现场巡检对杆头安装的设备无法更好的调整视角收集数据,人工现场巡检无法发现因电网设备缺陷导致局部温度过高的隐患难题等。
22.本发明的作业方式具有较强实用性,能通过人机无缝结合的方式应用,极大的方便配电网络巡检作业。因此,将其应用到配电网络巡检作业中具有十分重要的意义。
附图说明
23.此处所说明的附图用来提供对本发明实施例的进一步理解,构成本申请的一部分,并不构成对本发明实施例的限定。在附图中:
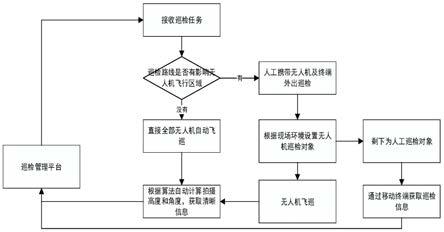
24.图1为本发明的作业方式中人机协同作业流程示意图;
具体实施方式
25.在下文中,可在本发明的各种实施例中使用的术语“包括”或“可包括”指示所发明的功能、操作或元件的存在,并且不限制一个或更多个功能、操作或元件的增加。此外,如在本发明的各种实施例中所使用,术语“包括”、“具有”及其同源词仅意在表示特定特征、数字、步骤、操作、元件、组件或前述项的组合,并且不应被理解为首先排除一个或更多个其它特征、数字、步骤、操作、元件、组件或前述项的组合的存在或增加一个或更多个特征、数字、步骤、操作、元件、组件或前述项的组合的可能性。
26.在本发明的各种实施例中,表述“或”或“a或/和b中的至少一个”包括同时列出的文字的任何组合或所有组合。例如,表述“a或b”或“a或/和b中的至少一个”可包括a、可包括b或可包括a和b二者。
27.在本发明的各种实施例中使用的表述(诸如“第一”、“第二”等)可修饰在各种实施例中的各种组成元件,不过可不限制相应组成元件。例如,以上表述并不限制所述元件的顺序和/或重要性。以上表述仅用于将一个元件与其它元件区别开的目的。例如,第一用户装
置和第二用户装置指示不同用户装置,尽管二者都是用户装置。例如,在不脱离本发明的各种实施例的范围的情况下,第一元件可被称为第二元件,同样地,第二元件也可被称为第一元件。
28.应注意到:如果描述将一个组成元件“连接”到另一组成元件,则可将第一组成元件直接连接到第二组成元件,并且可在第一组成元件和第二组成元件之间“连接”第三组成元件。相反地,当将一个组成元件“直接连接”到另一组成元件时,可理解为在第一组成元件和第二组成元件之间不存在第三组成元件。
29.在本发明的各种实施例中使用的术语仅用于描述特定实施例的目的并且并非意在限制本发明的各种实施例。如在此所使用,单数形式意在也包括复数形式,除非上下文清楚地另有指示。除非另有限定,否则在这里使用的所有术语(包括技术术语和科学术语)具有与本发明的各种实施例所属领域普通技术人员通常理解的含义相同的含义。所述术语(诸如在一般使用的词典中限定的术语)将被解释为具有与在相关技术领域中的语境含义相同的含义并且将不被解释为具有理想化的含义或过于正式的含义,除非在本发明的各种实施例中被清楚地限定。
30.为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。
31.一种用于配电网人机协同巡检的作业方法,如图1所示,包括如下步骤:
32.a、对无人机下发巡检任务,巡检任务包括巡检航线、坐标点;
33.b、无人机接收巡检任务,依据无人机数量和区域,进行巡检任务;
34.c、无人机上配置的相机实时传输巡检航线上数据,配电网巡检管理平台通过数据计算巡检对象的高度、角度,得到巡检对象的图像信息;
35.d、无人机监测巡检航线上的巡检对象的周边环境图片,并发至巡检管理平台判断是否影响无人机飞行,巡检管理平台自动分析并规划影响区域并发送至移动终端与无人机,工作人员持移动终端到达巡检区域,视察影响区域人工携带巡检对象进入影响区域,并设置新的区域巡检任务至无人机、巡检管理平台共享,无人机依据新的区域巡检任务进行巡检并执行步骤c后执行步骤e;
36.e、人工巡检步骤d中无人机在新的区域巡检任务中仍无法巡检的影响区域,并通过移动终端记录数据并发送至巡检管理平台。
37.进一步地,其中无人机上配置的相机数据包括录像数据、拍摄图片,还包括无人机相机数据传输时刻在传输时刻的无人机gps坐标数据。
38.进一步地,还包括f、巡检管理平台组合无人机巡检数据和人工巡检数据,并分析巡检数据对应设备是否存在安全运行隐患。
39.进一步地,步骤d还包括无人机在影响区域外侧观测环境并分析降落区域,无人机还将分析的降落区域与实际的降落点、降落时间、降落路径发送至巡检管理平台和移动终端共享,移动终端依据降落路径、实际的降落点回收无人机。
40.进一步地,还包括巡检管理平台实时监测无人机的电池余量,分析无人机的续航能力,并将相关数据和无人机编号对应发送至移动终端。
41.进一步地,巡检管理平台预先载入待巡检任务的配电网络拓扑结构并标定待巡检
设备,载入巡检设备信息和巡检内容,再依据无人机所在区域和无人机数量划分巡检任务,当无人机数量为一时,为单条巡检任务,巡检航线为连续的巡检航线;
42.当可用无人机数量大于一时,对巡检任务进行划分,将总的巡检航线分段发送至相应的无人机,还发送巡检任务至移动终端。
43.进一步地,还包括移动终端通过人工判断巡检任务的合理性,进行巡检任务干预,干预内容包括暂停巡检任务,重划分巡检任务;
44.暂停巡检任务,无人机寻找降落区域;
45.重划分巡检任务,人工圈定限制区域与修改航线内容至巡检管理平台,巡检管理平台依据移动终端内容再次分析巡检任务,分配符合移动终端人工要求的巡检任务。
46.实施例1:
47.巡检目的物包括于场镇和农村,整个供电网络线路长度4km。附近没有电气化铁路,没有穿越于高等级供电线路。则人员在巡检时,将位于场镇的巡检目的物设置为人工,而其余目的物均分配给无人机,分配无人机时,设置重点巡视瓷瓶是否破损,则无人巡视时,根据目的物的杆塔高度、杆塔性质(耐张、支线、分支),计算悬停角度,如对信息为10米耐张杆,无分支巡视时,计算出该杆进出线角度(基于经纬度),然后在进线和出线两侧根据摄像头焦距,尽可能近拍摄两端绝缘串瓷瓶的清晰照片。
48.实施例2:
49.巡检目的物位于山区乡村,有被其他电力线路穿越,则可以全部分配给无人机,而无人机则根据巡视目的物的交叉跨越信息,首先计算出最少飞跃跨越区域的航线,每次靠近穿越区域时,自动计算飞行高度,同时降低飞行速度,提醒人工视频监控,缓慢飞过跨越区域,再正常巡视,保证巡检安全。
50.以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1