基于机器视觉和座椅定位室内环境控制系统及其运行方法与流程
[0001]
本发明涉及一种基于机器视觉和座椅定位室内环境控制系统及其运行方法。
背景技术:
[0002]
在室内空调冷负荷的组成中,人员发热是室内候车大厅的主要冷负荷源。当室内人员变化时,人员发热发生变化,而这种变化会缓慢通过空气传热传质传递到常规技术的空调温控器处,无法被室内空调系统及时感知,导致室内空调系统的调节延迟,室内环境恶化,室内人员在空调系统做出反应前会感觉不舒适。因此,有待进一步改善。
技术实现要素:
[0003]
本发明所要解决的技术问题是,针对现有技术的不足,提供一种可提高室内舒适性的基于机器视觉和座椅定位室内环境控制系统及其运行方法。
[0004]
本发明解决其技术问题所采用的技术方案是:基于机器视觉和座椅定位室内环境控制系统,包括室内大厅、室内大厅大门、室内大厅座椅、空调送风设备,还设有智能摄像头、边缘计算控制器、电动云台、寻的瞄准红外视觉摄像头、人体感应传感器和数据采集及无线通信模块;所述智能摄像头安装在室内大厅大门上方,对进出室内大厅大门的人员数量进行统计,所述智能摄像头与边缘计算控制器相连;所述空调送风设备、电动云台、寻的瞄准红外视觉摄像头安装在室内大厅内,所述空调送风设备通过送风软管连接有远程送风喷口,所述远程送风喷口安装在电动云台上,所述空调送风设备上安装有空调设备控制器,所述空调送风设备、电动云台、寻的瞄准红外视觉摄像头与空调设备控制器相连,所述空调设备控制器与边缘计算控制器相连;所述人体感应传感器安装在室内大厅座椅上,每个室内大厅座椅安装一个,每个人体感应传感器都有唯一一个地址码,所述人体感应传感器与数据采集及无线通信模块相连,所述数据采集及无线通信模块与边缘计算控制器相连。
[0005]
进一步,还设有无线空气质量监测器,所述无线空气质量监测器安装在室内大厅内,可在室内大厅内任意位置设置;所述无线空气质量监测器与边缘计算控制器相连。所述无线空气质量监测器可采集所在位置的温度、湿度、风速、二氧化碳浓度、pm2.5、甲醛浓度、voc浓度、氧气浓度等空气质量参数,并将参数传输到边缘计算控制器。所述无线空气质量监测器采用电池供电,无线通信,可在候车大厅内任意位置设置。当无线空气质量监测器所在位置空气质量不达标且通过人体感应传感器发现有人坐时,边缘计算控制器向无线空调设备控制器发送控制信号,控制空调送风设备优先向不达标位置送风。
[0006]
进一步,还设有综合监测机器人,所述综合监测机器人位于室内大厅内,所述综合监测机器人上设有机器人手臂端部无线空气质量监测器;所述机器人手臂端部无线空气质量监测器与综合监测机器人、边缘计算控制器相连。所述综合监测机器人为可自动定位、自动巡检采集空气参数的智能机器人。所述综合监测机器人可将机器人手臂端部无线空气质量监测器移动到空间的不同位置、不同高度测量空气质量参数、并记录测量位置坐标,尤其
是可测量、记录人员呼吸区的空气质量参数。
[0007]
进一步,所述双目智能摄像头可智能识别人员和其他物体图像,将人员图像进行区分,统计人员数量并采集人员面部信息,并将人数发送到边缘计算控制器。
[0008]
进一步,所述边缘计算控制器为可进行高速运算、高速通信的智能控制器,可采集各种传感器的信息,并对各种执行器进行控制。
[0009]
进一步,所述送风软管为可伸缩的保温送风软管。所述电动云台可在空调设备控制器控制下360
°
旋转。所述远程送风喷口为借助喷口的高度可将气流喷射输送到2-20米距离处。
[0010]
进一步,所述寻的瞄准红外视觉摄像头为具有红外识别、人体识别功能的智能摄像头,自带微型旋转云台,可自动发现并驱动云台转向指向瞄准人群聚集的“热点”。
[0011]
进一步,所述空调设备控制器为无线空调设备控制器。所述无线空调设备控制器为智能控制器。
[0012]
所述基于机器视觉和座椅定位室内环境控制系统的运行方法,包括以下过程:通过双目智能摄像头识别采集到进入室内大厅的人数,进而通过边缘计算控制器准确计算室内大厅冷负荷和新风量,再迅速对空调送风设备进行精确预调节;通过人体感应传感器实时监测每个座椅上是否有人,进而确定进入室内大厅的人员坐的位置,再通过寻的瞄准红外视觉摄像头指向,电动云台和远程送风喷口向人员送风。
[0013]
进一步,还设有无线空气质量监测器,通过无线空气质量监测器采集所在位置的温度、湿度、风速、二氧化碳浓度、pm2.5、甲醛浓度、voc浓度、氧气浓度等空气质量参数,并将参数传输到边缘计算控制器;当无线空气质量监测器所在位置空气质量不达标且通过人体感应传感器发现有人坐时,边缘计算控制器向空调设备控制器发送控制信号,控制空调送风设备优先向不达标位置送风。
[0014]
进一步,还设有综合监测机器人,通过综合监测机器人将机器人手臂端部无线空气质量监测器移动到空间的不同位置、不同高度测量空气质量参数并记录测量位置坐标,尤其是可测量、记录人员呼吸区的空气质量参数,当测量位置空气质量不达标时,边缘计算控制器向空调设备控制器发送控制信号,控制空调送风设备优先向不达标位置送风。
[0015]
本发明的有益效果如下:1.通过智能摄像头识别采集到进入室内大厅的人数,进而通过边缘计算控制器准确计算室内大厅冷负荷,再迅速对空调送风设备进行精确预调节。
[0016]
2.候车大厅座椅设有人体感应传感器,可实时监测每个座椅上是否有人,进而确定进入室内大厅的人员坐的位置,再通过寻的瞄准红外视觉摄像头指向,电动云台和远程送风喷口向人员送风,提高送风的准确性,进而提升舒适度并节约能耗。
[0017]
3.设有可自动移动的综合监测机器人,综合监测机器人带有机器人手臂端部无线空气质量监测器,可自动移动在各个不同高度测量空气质量等参数为空调送风设备运行提供参数依据,进而提升舒适度并节约能耗。
[0018]
4.本发明适应于铁路、地铁、汽车站、机场等站房场所。
附图说明
[0019]
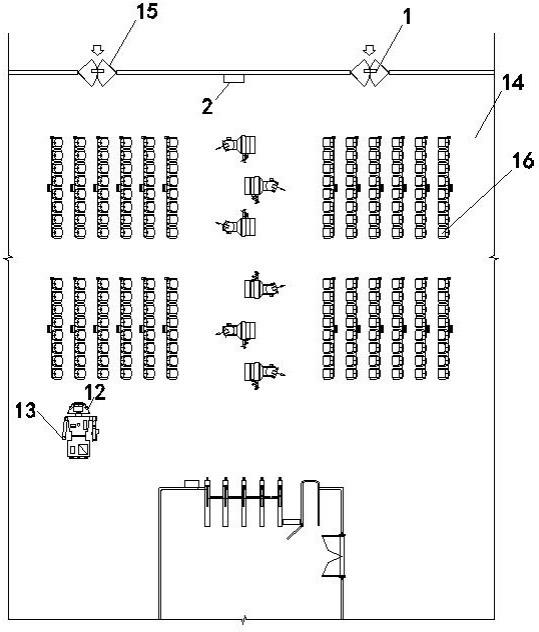
图1 为本发明之基于机器视觉和座椅定位室内环境控制系统实施例的结构示意
图;图2 为图1所示实施例的空调送风设备及相关部件放大示意图;图3 为图1所示实施例的候车大厅座椅及相关部件放大示意图;图中:1.双目智能摄像头,2.边缘计算控制器,3.空调送风设备,4.送风软管,5.电动云台,6.寻的瞄准红外视觉摄像头,7.远程送风喷口,8.无线空调设备控制器,9.人体感应传感器,10.数据采集及无线通信模块,11.无线空气质量监测器,12.综合监测机器人,13.机器人手臂端部无线空气质量监测器,14.候车大厅,15.候车大厅大门,16.候车大厅座椅。
具体实施方式
[0020]
以下结合附图及实施例对本发明作进一步说明。
实施例
[0021]
参照图1-图3,一种基于机器视觉和座椅定位站房室内环境控制系统,包括双目智能摄像头1、边缘计算控制器2、空调送风设备3、电动云台5、寻的瞄准红外视觉摄像头6、人体感应传感器9、数据采集及无线通信模块10、候车大厅14、候车大厅大门15和候车大厅座椅16;所述双目智能摄像头1安装在候车大厅大门15正上方,对进出候车大厅大门15的人员数量进行统计,所述边缘计算控制器2安装在候车大厅14内,所述双目智能摄像头1与边缘计算控制器2相连;所述空调送风设备3、电动云台5、寻的瞄准红外视觉摄像头6安装在候车大厅14内顶部,所述空调送风设备3通过送风软管4连接有远程送风喷口7,所述远程送风喷口7安装在电动云台5上,所述空调送风设备3上安装有无线空调设备控制器8,所述空调送风设备3、电动云台5、寻的瞄准红外视觉摄像头6与无线空调设备控制器8相连,所述无线空调设备控制器8与边缘计算控制器2相连;所述人体感应传感器9安装在候车大厅座椅16上,每个候车大厅座椅16安装一个,每个人体感应传感器9都有唯一一个地址码;所述人体感应传感器9与数据采集及无线通信模块10相连,所述数据采集及无线通信模块10与边缘计算控制器2相连。
[0022]
本实施例中,还设有无线空气质量监测器11,所述无线空气质量监测器11安装在候车大厅14内,可在候车大厅14内任意位置设置;所述无线空气质量监测器11与边缘计算控制器2相连。
[0023]
本实施例中,还设有综合监测机器人12,所述综合监测机器人12位于候车大厅14内,所述综合监测机器人12上设有机器人手臂端部无线空气质量监测器13;所述机器人手臂端部无线空气质量监测器13与综合监测机器人12、边缘计算控制器2相连。
[0024]
本实施例中,所述双目智能摄像头1可智能识别人员和其他物体图像,将人员图像进行区分,统计人员数量并采集人员面部信息,并将人数发送到边缘计算控制器2。
[0025]
本实施例中,所述边缘计算控制器2为可进行高速运算、高速通信的智能控制器,可采集各种传感器的信息,并对各种执行器进行控制。
[0026]
本实施例中,所述空调送风设备3为可对空气进行处理的空调设备。所述空调送风设备3从室内吸入空气,对吸入的空气升温、降温或加湿、除湿及净化处理后送回室内。
[0027]
本实施例中,所述送风软管4为可伸缩的保温送风软管。
[0028]
本实施例中,所述电动云台5可在无线空调设备控制器8控制下360
°
旋转。
[0029]
本实施例中,所述寻的瞄准红外视觉摄像头6为具有红外识别、人体识别功能的智能摄像头,自带微型旋转云台,可自动发现并驱动云台转向指向瞄准人群聚集的“热点”,并将微型旋转云台旋转的位置发送到无线空调设备控制器8,无线空调设备控制器8驱动电动云台5旋转,使得电动云台5的转动角度与寻的瞄准红外视觉摄像头6的微型旋转云台转动角度一致,实现远程送风喷口7与寻的瞄准红外视觉摄像头6的随动、指向一致。
[0030]
本实施例中,所述远程送风喷口7为电动可调远程送风喷口,随电动云台5转动,借助喷口的高度可将气流喷射输送到2-20米距离处。
[0031]
本实施例中,所述无线空调设备控制器8为智能控制器。所述无线空调设备控制器8与空调送风设备3、电动云台5、寻的瞄准红外视觉摄像头6连接并对其根据预设的程序进行控制。所述无线空调设备控制器8与边缘计算控制器2进行无线通信,上传参数或接受边缘计算控制器2的指令。
[0032]
本实施例中,所述人体感应传感器9可感应到坐在候车大厅座椅16上的人,并发出“占位”信号(即该座椅上已有人坐)到数据采集及无线通信模块10。数据采集及无线通信模块10再将“占位”信号传输到边缘计算控制器2。
[0033]
本实施例中,所述无线空气质量监测器11可采集所在位置的温度、湿度、风速、二氧化碳浓度、pm2.5、甲醛浓度、voc浓度、氧气浓度等空气质量参数,并将参数传输到边缘计算控制器2。所述无线空气质量监测器11采用电池供电,无线通信,可在候车大厅14内任意位置设置。当无线空气质量监测器11所在位置空气质量不达标且通过人体感应传感器9发现有人坐时,边缘计算控制器2向无线空调设备控制器8发送控制信号,控制空调送风设备3优先向不达标位置送风。
[0034]
本实施例中,所述综合监测机器人12为可自动定位、自动巡检采集空气参数的智能机器人。所述综合监测机器人12上按现有技术设有机械臂,机械臂端部设有机器人手臂端部无线空气质量监测器13。所述综合监测机器人12可将机器人手臂端部无线空气质量监测器13移动到空间的不同位置、不同高度测量空气质量参数、并记录测量位置坐标,尤其是可测量、记录人员呼吸区的空气质量参数。
[0035]
本实施例中,所述机器人手臂端部无线空气质量监测器13可测量温度、辐射温度、湿度、风速、噪音、二氧化碳浓度、pm2.5、甲醛浓度、voc浓度、氧气浓度、硫化氢浓度并具有烟雾感应功能。
[0036]
所述基于机器视觉和座椅定位室内环境控制系统的运行方法,包括以下过程:通过双目智能摄像头1识别采集到进入候车大厅14的人数,进而通过边缘计算控制器2准确计算候车大厅14冷负荷,再迅速对空调送风设备进行精确预调节;通过人体感应传感器9实时监测每个座椅上是否有人,进而确定进入候车大厅的人员坐的位置,再通过寻的瞄准红外视觉摄像头指向6,电动云台5和远程送风喷口7向人员送风;通过无线空气质量监测器11采集所在位置的温度、湿度、风速、二氧化碳浓度、pm2.5、甲醛浓度、voc浓度、氧气浓度等空气质量参数,并将参数传输到边缘计算控制器2;当无线空气质量监测器11所在位置空气质量不达标且通过人体感应传感器9发现有人坐时,边缘计算控制器2向无线空调设备控制器8发送控制信号,控制空调送风设备3优先向不达标位
置送风;通过综合监测机器人12将机器人手臂端部无线空气质量监测器13移动到空间的不同位置、不同高度测量空气质量参数并记录测量位置坐标,尤其是可测量、记录人员呼吸区的空气质量参数,当测量位置空气质量不达标时,边缘计算控制器2向无线空调设备控制器8发送控制信号,控制空调送风设备优先向不达标位置送风。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1