一种智能割草机器人的智能割草方法与流程
1.本发明属于智能机器人控制技术领域,具体涉及一种智能割草机器人的智能割草方法。
背景技术:
2.近年来,随着城市绿化面积显著提高,公共绿地定时维护、修建工作日益繁琐。为了提高作业效率,减少劳动力成本,传统手动割草机升级为全智能的智能割草机器人成为研究的热点问题。
3.目前市面上很多智能割草机需要埋设边界感应物,不方便大规模野外作业。
技术实现要素:
4.为解决现有技术存在的缺陷,本发明提供一种智能割草机器人的智能割草方法。
5.为了解决上述技术问题,本发明提供了如下的技术方案:
6.本发明提供一种智能割草机的智能割草方法,根据用户设定的参数,在作业区域内规划出n条作业线;结合陀螺数据和卫星定位数据,规划出具体的行走路径,并控制割草机靠近或者沿着作业线作业。
7.作为本发明的一种优选技术方案,割草机靠近或者沿着当前作业线作业过程中,割草机没有获得卫星定位有效数据时,每隔设定距离对割草机器人的运动方向进行调整,该调整过程具体如下:
8.设定割草机沿当前作业线作业时的当前位置为a点,a点到当前作业线的垂直线与当前作业线的交点为b点,根据预设距离bc获得c点位置,a点到b点的距离为ab,b点到c点的距离为bc,a点到c点的距离为ac;
9.当ab≠0时,调转割草机朝向当前作业线,然后通过陀螺仪获得割草机器人a点的当前朝向,然后获得a点的当前朝向与当前作业线的夹角,该夹角为∠dae;同时获得ac与当前作业线的夹角,该夹角为∠dac,
[0010][0011]
若∠dae小于∠dac,则控制割草机器人向靠近当前作业线的方向转向;
[0012]
若∠dae大于∠dac,则控制割草机器人向远离当前作业线的方向转向。
[0013]
作为本发明的一种优选技术方案,割草机在靠近或者沿着当前作业线作业过程中,获得卫星定位的数据有效时,根据预设条件获得参考点1和参考点2的位置,并将参考点1和参考点2构成的直线作为卫星定位参考线,将当前作业线的行数记为n1,其中预设条件为参考点1和参考点2相隔设定距离;然后重新规划出作业区的作业线。
[0014]
作为本发明的一种优选技术方案,在割草机获得卫星定位参考线后,进行作业过程中,获得卫星定位有效数据时,将此时的位置标记为a点,并通过陀螺仪获得割草机器人a点的朝向,然后利用a点、参考点1和参考点2的卫星定位数据计算出割草机到当前作业线的
垂直距离w2;
[0015]
设定a点到当前作业线的垂直线与当前作业线的交点为b点,并根据预设距离bc获得c点位置;根据a点到当前作业线的垂直距离w2、预设距离bc从而获得a点到c点的路径,然后将割草机a点的朝向进行调整,使得割草机从a点行走到c点,进行当前作业线。
[0016]
作为本发明的一种优选技术方案,将割草机的朝向进行调整,使得割草机从a点行走到c点,该调整过程如下:
[0017]
设定a点到当前作业线的垂直线与当前作业线的交点为b点,根据预设距离bc获得c点位置,a点到b点的距离为ab,即w2,b点到c点的距离为bc,a点到c点的距离为ac;
[0018]
然后通过陀螺仪获得割草机a点的当前朝向,然后获得a点的当前朝向与当前作业线的夹角,该夹角为∠dae;同时获得ac与当前作业线的夹角,该夹角为∠dac,
[0019][0020]
若∠dae小于∠dac,则控制割草机向靠近当前作业线的方向转向;
[0021]
若∠dae大于∠dac,则控制割草机向远离当前作业线的方向转向。
[0022]
作为本发明的一种优选技术方案,根据规划的作业线长度,完成当前作业线作业,或根据传感器感应到边界完成当前作业线作业;然后掉头,靠近或者沿着下一行作业线作业,直到完成作业区作业。
[0023]
作为本发明的一种优选技术方案,根据传感器感应到边界完成目标作业为采用摄像头、超声波传感器,红外传感器中的至少一个判断边界;
[0024]
1)根据摄像头获得的图像信息判断边界
[0025]
每行作业线的起点为w,终点为x,起点和终点的距离预设为len,在距离起点w一定距离设置p点,距离终点x一定距离设置q点,从小车位置向当前作业线作垂线,垂点位于p点,q点之间时,且小车车载陀螺指向与当前作业线的夹角在一定范围时,获取小车摄像头图像中靠近未作业区一侧的图像信息,并提取其颜色,纹波,饱和度等信息中的至少一种信息,分析并存储其特征,当小车行驶距离终点距离小于点q到终点x的距离时,将小车获得图像特征信息与已经存储的特征进行比较,存在某种程度差异时,就认为遇到边界,进行下一行作业或者绕行;
[0026]
2)利用超声波雷达判断边界
[0027]
当超声波雷达检测到障碍物的距离为小于等于l1时,小车进行制动,然后计时,时间为t1,如果超声波雷达监测到障碍物的距离大于l1时,说明障碍物离开,将t1清零,小车继续进行作业;如果时间t1大于预设时间tsc,就认为遇到边界,小车掉头进行下一行作业,或者绕行;
[0028]
3)利用红外传感器判断边界
[0029]
当红外传感器感应到前方有人或动物时,小车进行制动,并计时,时间为t2,当人或者动物离开,红外传感器未检测人或者动物时,将t2清零,小车继续进行作业;当t2大于预设时间tsh时,认为小车遇到边界,进行下一行作业,或者绕行。
[0030]
作为本发明的一种优选技术方案,因为陀螺指向会随着时间推移而产生误差,所以利用卫星定位的有效数据对陀螺指向进行修正;
[0031]
割草机在进行当前行作业的过程中,获得卫星定位有效数据时的位置为g1,
g2...gn,在任意两个卫星定位点h点、k点之间,小车每移动一段距离设置一个检测点,共设置n个检查点,割草机到达每个检测点时,可以此时的陀螺指向,每个检测点的陀螺指向与作业线的夹角分别为dir1,dir2...dirn,然后通过比较获得这些夹角中的最大值与最小值,并计算出最大值与最小值的差值,当此差值小于阈值dirsh时,计算出这些检查点的平均值dirav,∠ehd等于dirav;
[0032]
hh垂直直线st于h点,kk垂直直线st于k点,因为参考点1,参考点2,h点都接收到了卫星定位的坐标,根据坐标轴可以计算出此三点构成的三角形的三边边长,进而可以计算出hh的长度,同理可以计算出kk的长度,he垂直kk于e点,可以得到ek的长度:ek=kk-hh,根据点h,点k的卫星定位的坐标值可以计算出hk的长度,计算出:
[0033]
可以利用∠ehk与∠ehd的差值对陀螺的指向进行修正。
[0034]
作为本发明的一种优选技术方案,当小车陀螺感知的俯仰指向与水平面夹角大于预设阈值时,或者小车陀螺感知到的侧倾指向与水平面夹角大于预设阈值时,小车停止作业,倒退,并发出警报。
[0035]
本发明相较于现有技术,具有以下有益效果:
[0036]
本发明公开了一种智能割草机器人的智能割草方法,结合了卫星定位数据,陀螺指向数据,对小车行走路线进行规划,并对小车行进过程中陀螺产生的误差进行修正,使其降低了作业重复率,而且提升了作业效率。通过超声波雷达,摄像头,红外传感器中的至少一种,进行边界识别,降低了用户在作业过程中介入的次数,进一步提升了作业效率。
附图说明
[0037]
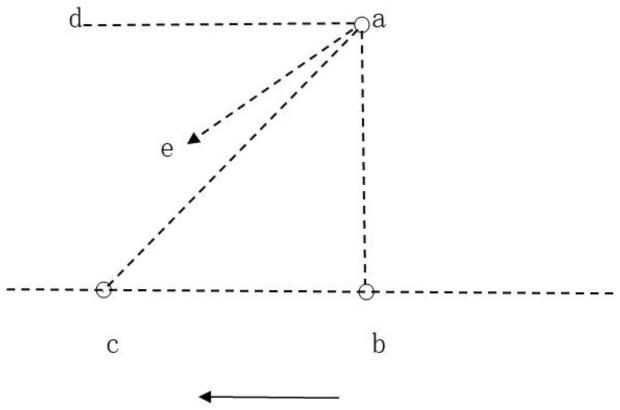
图1是本发明中割草机没有获得卫星定位有效数据时的第一示意图;
[0038]
图2是本发明中割草机没有获得卫星定位有效数据时的第二示意图;
[0039]
图3是本发明中进行作业过程中获得卫星定位有效数据时的第一示意图;
[0040]
图4是本发明中进行作业过程中获得卫星定位有效数据时的第二示意图;
[0041]
图5是本发明中根据摄像头获得的图像信息判断边界的示意图;
[0042]
图6是本发明中利用卫星定位的有效数据对陀螺指向进行修正的示意图。
具体实施方式
[0043]
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
[0044]
为了达到本发明的目的,在本发明的其中一种实施方式中提供一种智能割草机的智能割草方法,根据用户设定的参数,卫星定位数据,在作业区域内规划出n条作业线;结合陀螺数据和卫星定位数据,规划出具体的行走路径,并控制割草机靠近或者沿着作业线作业。
[0045]
根据实际情况,割草机靠近或者沿着当前作业线作业过程中,割草机没有获得卫星定位有效数据时,每隔设定距离对割草机器人的运动方向进行调整,该调整过程具体如下:
[0046]
如图1至图2所示,设定割草机沿当前作业线作业时的当前位置为a点,a点到当前
作业线的垂直线与当前作业线的交点为b点,根据预设距离bc获得c点位置,a点到b点的距离为ab,b点到c点的距离为bc,a点到c点的距离为ac;
[0047]
当ab≠0时,调转割草机朝向当前作业线,然后通过陀螺仪获得割草机器人a点的当前朝向,然后获得a点的当前朝向与当前作业线的夹角,该夹角为∠dae;同时获得ac与当前作业线的夹角,该夹角为∠dac,
[0048][0049]
若∠dae小于∠dac,则控制割草机器人向靠近当前作业线的方向转向;
[0050]
若∠dae大于∠dac,则控制割草机器人向远离当前作业线的方向转向。
[0051]
根据实际情况,割草机在靠近或者沿着当前作业线作业过程中,获得卫星定位数据有效时,根据预设条件获得参考点1和参考点2的位置,并将参考点1和参考点2构成的直线,作为卫星定位参考线,将当前作业线的行数记为n1,其中预设条件为参考点1和参考点2相隔设定距离;然后重新规划出作业区的作业线。
[0052]
具体的,在割草机获得卫星定位参考线后,进行作业过程中,获得卫星定位有效数据时,将此时的位置标记为a点,并通过陀螺仪获得割草机器人a点的朝向,然后利用a点、参考点1和参考点2的卫星定位数据计算出割草机到当前作业线的垂直距离w2;
[0053]
设定a点到当前作业线的垂直线与当前作业线的交点为b点,并根据预设距离bc获得c点位置;根据a点到当前作业线的垂直距离w2、预设距离bc从而获得a点到c点的路径,然后将割草机a点的朝向进行调整,使得割草机从a点行走到c点,靠近或者沿着当前作业线作业。
[0054]
具体的,将割草机的朝向进行调整,使得割草机从a点行走到c点,该调整过程如下:
[0055]
另外,根据预设作业线之间的间距with,计算出当前作业线和卫星定位参考线得距离w,w=(n2-n1)*with,其中n2为当前作业线的行数,n1位卫星参考线所对应得作业线行数。计算出a点到当前作业线的垂直距离w2:1)当a点位于当前作业线与第一行作业线之间时,w2=w-w1;2)当a点位于当前作业线与第一行作业线外侧,w2=w1-w;
[0056]
根据a点到当前作业线的垂直距离w2、预设距离bc计算出∠bac的角度,根据割草机a点的朝向和∠bac的角度计算出割草机需要调整的角度,使得割草机从a点行走到c点。
[0057]
如图3至图4所示,设定a点到当前作业线的垂直线与当前作业线的交点为b点,根据预设距离bc获得c点位置,a点到b点的距离为ab,即w2,b点到c点的距离为bc,a点到c点的距离为ac;
[0058]
然后通过陀螺仪获得割草机a点的当前朝向,然后获得a点的当前朝向与当前作业线的夹角,该夹角为∠dae;同时获得ac与当前作业线的夹角,该夹角为∠dac,
[0059][0060]
若∠dae小于∠dac,则控制割草机向靠近当前作业线的方向转向;
[0061]
若∠dae大于∠dac,则控制割草机向远离当前作业线的方向转向。
[0062]
本实施例还根据规划的作业线长度,完成当前作业线作业,或根据传感器感应到边界完成当前作业线作业;然后掉头,靠近或者沿着下一行作业线作业,直到完成作业区作
业。
[0063]
具体的,根据传感器感应到边界完成目标作业为采用摄像头、超声波传感器,红外传感器中的至少一个判断边界;
[0064]
1)根据摄像头获得的图像信息判断边界
[0065]
如图5所示,每行作业线的起点为w,终点为x,起点和终点的距离预设为len,在距离起点w一定距离设置p点,距离终点x一定距离设置q点,从小车位置向当前作业线作垂线,垂点位于p点,q点之间时,且小车车载陀螺指向与当前作业线的夹角在一定范围时,获取小车摄像头图像中靠近未作业区一侧的图像信息,并提取其颜色,纹波,饱和度等信息中的至少一种信息,分析并存储其特征,当小车行驶距离终点距离小于点q到终点x的距离时,将小车获得图像特征信息与已经存储的特征进行比较,存在某种程度差异时,就认为遇到边界,进行下一行作业或者绕行;
[0066]
2)利用超声波雷达判断边界
[0067]
当超声波雷达检测到障碍物的距离为小于等于l1时,小车进行制动,然后计时,时间为t1,如果超声波雷达监测到障碍物的距离大于l1时,说明障碍物离开,将t1清零,小车继续进行作业;如果时间t1大于预设时间tsc,就认为遇到边界,小车掉头进行下一行作业,或者绕行;
[0068]
3)利用红外传感器判断边界
[0069]
当红外传感器感应到前方有人或动物时,小车进行制动,并计时,时间为t2,当人或者动物离开,红外传感器未检测人或者动物时,将t2清零,小车继续进行作业;当t2大于预设时间tsh时,认为小车遇到边界,进行下一行作业,或者绕行。
[0070]
具体的,因为陀螺指向会随着时间推移而产生误差,所以利用卫星定位的有效数据对陀螺指向进行修正;
[0071]
如图6所示,割草机在进行当前行作业的过程中,获得卫星定位有效数据时的位置为g1,g2...gn,在任意两个卫星定位点h点、k点之间,小车每移动一段距离设置一个检测点,共设置n个检查点,割草机到达每个检测点时,可以此时的陀螺指向,每个检测点的陀螺指向与作业线的夹角分别为dir1,dir2...dirn,然后通过比较获得这些夹角中的最大值与最小值,并计算出最大值与最小值的差值,当此差值小于阈值dirsh时,计算出这些检查点的平均值dirav,∠ehd等于dirav;
[0072]
hh垂直直线st于h点,kk垂直直线st于k点,因为参考点1,参考点2,h点都接收到了卫星定位的坐标,根据坐标轴可以计算出此三点构成的三角形的三边边长,进而可以计算出hh的长度,同理可以计算出kk的长度,he垂直kk于e点,可以得到ek的长度:ek=kk-hh,根据点h,点k的卫星定位的坐标值可以计算出hk的长度,计算出:
[0073]
可以利用∠ehk与∠ehd的差值对陀螺的指向进行修正。
[0074]
dircval为∠ehk与∠ehd的差值:dircval=∠ehk-∠ehd,dircval可能为正数或者负数。tldir1为陀螺的当前指向,此值大于或者等于0度,且小于360度,如果dircval不等于0,tldir2=dircval/2+tldir1,tldir3为修正后的陀螺指向。
[0075]
a)当tldir2大于或者等于360度时,tldir3=tldir2-360
°
;
[0076]
b)当tldir2小于0度时,tldir3=360
°
+tldir2;
[0077]
c)当tldir2大于或者等于0度,且小于360度时,tldir3=tldir2;
[0078]
当小车陀螺感知的俯仰指向与水平面夹角大于预设阈值时,或者小车陀螺感知到的侧倾指向与水平面夹角大于预设阈值时,小车停止作业,倒退,并发出警报。
[0079]
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1