一种船舶污染物排放综合智能监控系统与监控方法
1.本发明涉及船舶污染物排放智能监控技术领域,尤其涉及一种船舶污染物排放综合智能监控系统与监控方法。
背景技术:
2.随着船舶排放法规要求的日益严格,以及人工智能、大数据、物联网等技术的快速发展,人们对船舶绿色化及智能化发展的需求日益迫切,污染物智能监控技术作为船舶智能化与绿色化发展的重要组成部分,是以实现船舶污染物综合实时监控、智能分析与决策,降低船舶污染物排放水平为目标,通过大数据分析技术、智能评估与决策等技术,提高船舶污染物的排放综合监控的智能化水平。
3.船舶污染物排放综合智能监控系统与方法是实现船舶污染物综合智能监控的关键。目前船舶污染物监控技术仍处于发展阶段,监测技术及监测目标较为单一,尚缺少有效的污染物排放综合智能监控技术与方法。无法实现航行状态下各种污染物的综合智能监控与智能分析决策。
技术实现要素:
4.基于此,本发明实施例提出了一种船舶污染物排放综合智能监控系统,此系统集污染物数据采集技术、船舶运行实时数据采集技术、数据存储与处理技术、数据智能实时分析评估与决策技术于一体。以实现对船舶各种污染物排放的智能监测与管控,从而服务于船舶污染物排放综合监控的智能化发展过程。
5.为了实现上述目的,对应的技术方案包括:
6.一种船舶污染物排放综合智能监控系统,其特征在于,包括:
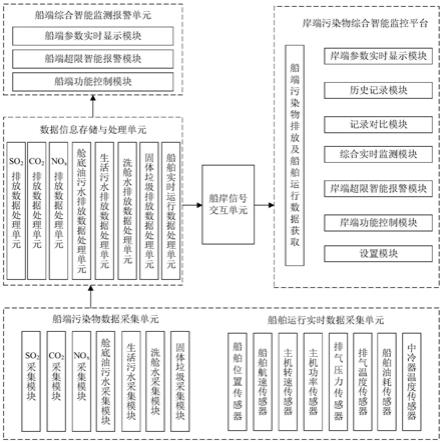
7.船端污染物数据采集单元、船舶运行实时数据采集单元、数据信息存储与处理单元、船端综合智能监测报警单元、船岸信号交互单元以及岸端污染物综合智能监控平台;
8.其中,所述船端污染物数据采集单元能够实时地采集并反馈船端各污染物排放数据;所述各污染物排放数据至少包括so2排放数据、co2排放数据、nox排放数据、舱底油污水排放数据、生活污水排放数据、洗舱水排放数据及固体垃圾排放数据;
9.所述船舶运行实时数据采集单元能够实时地采集并反馈船舶运行状态数据;其中,所述船舶运行状态数据信息至少包括船舶位置数据、船舶航速数据、主机转速数据、主机功率数据、排气压力数据、排气温度数据、船舶油耗数据、中冷器温度数据;
10.所述数据信息存储与处理单元能够接收并处理船端污染物数据采集单元与船舶运行实时数据采集单元返回的数据,进行数据处理后上传,同时转换成能够被直接显示的数字信息;所述数据处理的过程包括对船端污染物排放数据的存储与处理过程以及对船舶运行实时数据的存储与处理过程;其中,所述船端污染物排放数据的存储与处理至少包括so2排放数据的存储与处理、co2排放数据的存储与处理、nox排放数据的存储与处理、舱底油污水排放数据的存储与处理、生活污水排放数据的存储与处理、固体垃圾排放数据的存储
与处理;所述船舶运行实时数据的存储与处理包括船舶位置数据的存储与处理、船舶航速数据的存储与处理、主机转速数据的存储与处理、主机功率数据的存储与处理、排气压力数据的存储与处理、排气温度数据的存储与处理、船舶油耗数据的存储与处理、中冷器温度数据的存储与处理;
11.所述船岸信号交互单元能够实现船端与岸端之间的数据信息交互传输过程;
12.所述船端综合智能监测报警单元能够在显示当前各污染物排放数据与船舶运行状态数据的同时,对所获取污染物数据与船舶运行实时数据进行分析与评估;并在完成自身基本控制的同时对超限污染物数据进行超限报警;所述自身基本控制的过程包括:自检过程、解除超限报警过程、切断排放源过程以及超限报警数据上报过程;
13.所述岸端污染物综合智能监控平台能够实时显示并存储当前各污染物排放数据与船舶运行状态数据,并对所获取污染物数据与船舶运行实时数据进行分析与评估,同时完成自身基本控制过程;所述的分析与评估的过程包括:按照所选定的维度对各污染物排放量进行对比分析及显示,并实时显示各污染物排放量变化趋势;同时能够在污染物排放量超限时进行超限报警,并向海事监管部门反馈超限报警信息。
14.进一步的,所述船端污染物数据采集单元包括so2采集模块、co2采集模块、no
x
采集模块、舱底油污水采集模块、生活污水采集模块、洗舱水采集模块、固体垃圾采集模块;所述so2采集模块能够监测并反馈so2排放浓度;所述co2采集模块能够监测并反馈co2排放浓度;所述no
x
采集模块能够监测并反馈no
x
排放浓度;所述舱底油污水采集模块能够监测并反馈舱底油污水排放浓度;所述生活污水采集模块能够监测并反馈生活污水排放浓度;所述洗舱水采集模块能够监测并反馈洗舱水排放浓度;所述固体垃圾采集模块能够监测并反馈固体垃圾的排放量。
15.进一步的,所述船舶运行实时数据采集单元包括船舶位置传感器、船舶航速传感器、主机转速传感器、主机功率传感器、排气压力传感器、排气温度传感器、船舶油耗传感器、中冷器温度传感器;所述船舶位置传感器实时定位船舶的具体位置并返回数据信号;所述船舶航速传感器实时获取船舶航行速度并返回数据信号;所述主机转速传感器实时采集船舶主机转速并返回数据信号;所述排气压力传感器实时采集船舶排气压力并返回数据信号;所述排气温度传感器实时采集船舶排气温度并返回数据信号;所述船舶油耗传感器实时采集船舶的油耗量并返回数据信号;所述中冷器温度传感器实时采集船舶中冷器进出口温度并返回数据信号。
16.进一步的,所述数据信息存储与处理单元包括以太网数据传输模块、数据转换处理器;所述以太网数据传输模块能够接收并处理船端污染物数据采集单元与船舶运行实时数据采集单元返回的数据;所述数据转换处理器能够存储接收到的数据并进行数据处理,转换成能够被直接显示的数字信息并完成处理后的数据的上传操作。
17.进一步的,所述船端综合智能监测报警单元包括:船端参数实时显示模块、船端超限智能报警模块、船端功能控制模块;所述船端参数实时显示模块能够显示当前各污染物排放数据与船舶运行状态数据;所述船端超限智能报警模块能够在污染物排放量超限时进行超限报警,并向海事监管部门反馈超限报警信息;所述船端功能控制模块能够对所获取污染物数据与船舶运行实时数据进行分析与评估,并完成自身智能控制过程;所述自身智能控制的过程包括:自检过程、解除超限报警过程、与监管网络内的海事监管部门通信、接
收违规排放警告过程。
18.进一步的,所述岸端污染物综合智能监控平台包括:岸端参数实时显示模块、历史记录模块、记录对比模块、综合实时监测模块、岸端超限智能报警模块、岸端功能控制模块;其中,所述岸端参数实时显示模块能够实时显示当前各污染物排放数据与船舶运行状态数据;所述历史记录模块能够存储记录各污染物排放数据与船舶运行状态数据以形成排放记录;所述记录对比模块能够按照所选定的维度对各污染物排放量进行对比分析并显示,所述的维度至少包括时间维度以及地理位置维度;所述综合实时监测模块能够实时显示各污染物排放量变化趋势;所述岸端超限智能报警模块能够在污染物排放量超限时进行超限报警,并向海事监管部门反馈超限报警信息;所述岸端功能控制模块能够对所获取污染物数据与船舶运行实时数据进行分析与评估,完成自身基本控制过程,所述自身基本控制的过程包括:自检过程、解除超限报警过程、与监管网络内的船舶通信、发送违规排放警告过程。
19.此外,为解决传统技术存在的不足,还提出了一种船舶污染物排放综合智能监控方法,其特征在于:
20.s1、通过船端污染物数据采集单元与船舶运行实时数据采集单元,获取污染物排放数据与船舶运行状态数据;
21.s2、通过数据信息存储与处理单元接收并处理船端污染物数据采集单元与船舶运行实时数据采集单元返回的数据;
22.s3、通过船端综合智能监测报警单元实时监测并统计污染物排放数据,并与污染物排放限值进行对比,基于所设定的船端显示与智能决策策略,进行数据显示、超限报警并控制对应的船舶执行单元实现污染物的超排控制;
23.所述的船端显示与智能决策策略包括:比较分析当前的污染物排放量、历史记录排放量百分参数值、污染物排放限值之间的数据关系;若当前的污染物排放量处于高于所给定的历史记录排放量百分参数值且低于污染物排放限值的范围时,船端综合智能监测报警单元自动显示船舶污染物排放数据、船舶实时运行数据与排放控制智能决策方案,并向对应的船端操作人员发出提醒警示,以便于船端操作人员按照排放控制智能决策方案进行相应的减排操作;若当前的污染物排放量高于设定的污染物排放限值时,进行超限报警同时发送给海事监管部门以及相应船舶,并智能分析其超排原因并给出相应的排放控制智能决策方案;若污染物排放量低于污染物排放限值时,系统正常运行;
24.s4、在船端发生报警情况时,通过船端综合智能监测报警单元切断排放源并消除警报;同时岸端海事监管部门通过岸端超限智能报警模块与所述船岸信号交互单元自动向该船舶发送违规排放警告。
25.进一步的,所述排放控制智能决策方案的获取过程包括:
26.将船舶污染物数据超过报警限值的数据作为异常值数据,并对该异常值数据进行分析以及特征提取,以确定出对应的超排原因并给出该超排原因对应的解决方案。
27.进一步的,所将船舶污染物数据超过报警限值的数据作为异常值数据,并对该异常值数据进行分析,以确定出对应的超排原因并给出该超排原因对应的解决方案过程包括:
28.(1)、定义异常值数据集为d={x1,x2,......x
m
},且每个x
i
∈r,r表示全体实数,其中x
i
表示在船舶运行时船端污染物数据采集单元与船舶运行实时数据采集单元所采集的
各项实时数据,其包括so2浓度数据、co2浓度数据、no
x
浓度数据、船底油污水浓度数据、生活污水浓度数据、洗舱水浓度数据、固体垃圾排放量数据、船舶位置数据、船舶航速数据、主机转速数据、主机功率数据、排气压力数据、排气温度数据、船舶油耗数据、中冷器温度数据;
29.(2)、随机选取k个初始质心以及对应的分簇,其中,初始质心表示为u={u1,u2,......u
k
},对应的分簇表示为c={c1,c2,......c
k
};其中k值为导致污染物超排的原因的数量,每一分簇由围绕质心分布的船端污染物数据与船舶运行实时数据异常值数据样本点组成;
30.(3)、对于每个异常值数据样本点,遍历k个质心,通过下式计算得到距离任意异常值数据样本点x
i
最近的质心u
j
,将异常值数据样本点x
i
的类别设置为质心u
j
所对应的簇类,即;
31.c
i
=arg min||x
i
‑
u
j
||2ꢀꢀꢀ
(1)
32.(4)、更新完所有异常值数据样本点类别之后,再次遍历每个簇类中所有的异常值数据样本点,通过下式计算该类新的质心,即;
[0033][0034]
(5)、不断重复步骤(3)和(4),直至所有的异常值数据样本点不再被分配或质心不再变化,则本算法结束;并最后得到k簇结果,每一簇结果都有高度相似的特征,不同的簇则对应船舶不同的超排原因;
[0035]
(6)、首先,利用小波变换分别对不同簇对应的污染物数据信号去噪,再对去噪后的污染物数据信号进行尺度分析,提取所述污染物数据信号在不同尺度上的特征从而进行后续的智能决策分析,所述尺度包括时间与频率;
[0036]
其次,对经过小波变换的污染物数据信号进行频段分析,并分别以各个频带的能量作为特征向量即离散数据特征,将其与排放异常智能决策处理知识库的数据特征进行对比,结合船舶位置传感器发送的船舶实时位置与船舶主机转速信息,确定出其具体超排原因及解决方案;其中所述的排放异常智能决策处理知识库内置于船端综合智能监测报警单元中并以数据库的形式进行存储,该知识库针对每一超排原因均设置相应的解决方案,此知识库包括三个维度,分别为数据信号特征、对应的超排原因、对应的解决方案;具体解决方案形式如下:
[0037][0038]
进一步的,所确定出其具体超排原因及解决方案具体步骤如下:
[0039]
(61)、选择daubechies小波作为小波基函数,固定尺度因子a;
[0040]
(62)、通过下式计算小波系数:
[0041][0042]
式中,wt
x
(a,τ)为所求小波系数;a为尺度因子,其作用是对小波基函数作伸缩;τ为平移因子;x(t)为待测数据信号;t表示时间。
[0043]
(63)、对污染物数据信号采用小波阈值去噪,阈值的确定方法为极大极小阈值选择方法。确定阈值后,使用硬阈值去噪法对含有噪声系数的小波系数进行过滤,去除其高斯噪声系数,即当小波系数的绝对值小于给定阈值时,令其为零;大于阈值时,则令其保持不变,对应的公式如下:
[0044]
[0045]
式中,w为小波系数,λ为相应阈值。
[0046]
(64)、将经过阈值处理后的小波系数重构,得到去噪后的信号;
[0047]
(65)、以τ0为步长连续改变平移因子τ,使小波沿时间轴位移,重复上述(61)
‑
(64)步骤,完成第一次分析;
[0048]
(66)、以a0为步长连续增加尺度因子a,重复上述步骤(62)
‑
(65),完成第二次分析;
[0049]
(67)、循环上述步骤(61)
‑
(66),直至某一时域污染物数据信号全部分析完毕。
[0050]
实施本发明实施例,将具有如下有益效果:
[0051]
采用了上述技术之后,本发明实现了船舶各污染源的综合智能监测与报警,具体的可实现各污染物排放的实时显示及统计分析,污染物超限排放的智能分析与报警,以及自动给出污染源超限排放智能分析与决策方案。因此本发明可以实现船舶多污染物实时在线监控以及与海事监管部门的联防联控,从而提高船舶污染物排放综合监控的智能化水平,服务于船舶的绿色化发展。
附图说明
[0052]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0053]
其中:
[0054]
图1为一个实施例中所述系统的结构框架图;
[0055]
图2为一个实施例中所述污染物排放超限智能报警实现流程图;
[0056]
图3为一个实施例中所述一种船舶污染物排放综合智能监控方法流程图;
具体实施方式
[0057]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0058]
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在限制本发明。可以理解,本发明所使用的术语“第一”、“第二”等可在本文中用于描述各种元件,但这些元件不受这些术语限制。这些术语仅用于将第一个元件与另一个元件区分。举例来说,在不脱离本申请的范围的情况下,可以将第一元件称为第二元件,且类似地,可将第二元件为第一元件。第一元件和第二元件两者都是元件,但其不是同一元件。
[0059]
在本实施例中,特提出了一种船舶污染物排放综合智能监控系统,如图1
‑
图3所示,该系统由船端污染物数据采集单元、船舶运行实时数据采集单元、数据信息存储与处理单元、船端综合智能监测报警单元、船岸信号交互单元以及岸端污染物综合智能监控平台组成;
[0060]
其中,所述船端污染物数据采集单元能够实时地采集并反馈船端各污染物排放数据;所述各污染物排放数据至少包括so2排放数据、co2排放数据、nox排放数据、舱底油污水排放数据、生活污水排放数据、洗舱水排放数据及固体垃圾排放数据;
[0061]
所述船舶运行实时数据采集单元能够实时地采集并反馈船舶运行状态数据;其中,所述船舶运行状态数据信息至少包括船舶位置数据、船舶航速数据、主机转速数据、主机功率数据、排气压力数据、排气温度数据、船舶油耗数据、中冷器温度数据;
[0062]
所述数据信息存储与处理单元能够接收并处理船端污染物数据采集单元与船舶运行实时数据采集单元返回的数据,进行数据处理后上传,同时转换成能够被直接显示的数字信息;所述数据处理的过程包括对船端污染物排放数据的存储与处理过程以及包括对船舶运行实时数据的存储与处理过程;其中,所述船端污染物排放数据的存储与处理至少包括so2排放数据的存储与处理、co2排放数据的存储与处理、nox排放数据的存储与处理、舱底油污水排放数据的存储与处理、生活污水排放数据的存储与处理、固体垃圾排放数据的存储与处理;所述船舶运行实时数据的存储与处理包括船舶位置数据的存储与处理、船舶航速数据的存储与处理、主机转速数据的存储与处理、主机功率数据的存储与处理、排气压力数据的存储与处理、排气温度数据的存储与处理、船舶油耗数据的存储与处理、中冷器温度数据的存储与处理;
[0063]
所述船岸信号交互单元能够实现船端与岸端之间的数据信息交互传输过程;
[0064]
所述船端综合智能监测报警单元能够在显示当前各污染物排放数据与船舶运行状态数据的同时,对所获取污染物数据与船舶运行实时数据进行分析与评估;并在完成自身基本控制的同时对超限污染物数据进行超限报警并向海事监管部门反馈超限报警信息;所述自身基本控制的过程包括:自检过程、解除超限报警过程、切断排放源过程以及超限报警数据上报过程;
[0065]
所述岸端污染物综合智能监控平台能够实时显示并存储当前各污染物排放数据与船舶运行状态数据,并对所获取污染物数据与船舶运行实时数据进行分析与评估,同时完成自身基本控制过程;所述的分析与评估的过程包括:按照所选定的维度对各污染物排放量进行对比分析及显示,并实时显示各污染物排放量变化趋势;同时能够在污染物排放量超限时进行超限报警,并向海事监管部门反馈超限报警信息。
[0066]
在一些具体的实施例中,所述船端污染物数据采集单元包括so2采集模块、co2采集模块、nox采集模块、舱底油污水采集模块、生活污水采集模块、洗舱水采集模块、固体垃圾采集模块;所述so2采集模块主要监测so2排放浓度并返回浓度信号;所述co2采集模块主要监测co2排放浓度并返回浓度信号;所述nox采集模块主要监测nox排放浓度并返回浓度信号;所述舱底油污水采集模块主要监测舱底油污水排放浓度并返回浓度信号;所述生活污水采集模块主要监测生活污水排放浓度并返回浓度信号;所述洗舱水采集模块主要监测洗舱水排放浓度并返回浓度信号;所述固体垃圾采集模块监测固体垃圾的排放量,进一步地,其包括两个hw
‑
lde智能电磁流量计子模块,能够直接通过以太网输出流量值,通过计算流量的差值,从而监测固体垃圾的排放量。
[0067]
在一些具体的实施例中,所述数据信息存储与处理单元包括以太网数据传输模块、数据转换处理器;所述以太网数据传输模块能够接收并处理船端污染物数据采集单元与船舶运行实时数据采集单元返回的数据;所述数据转换处理器能够存储接收到的数据并
进行数据处理,转换成能够被直接显示的数字信息(如将返回的信息通过a/d转换成可直接显示的数字信息)并完成处理后的数据的上传操作。
[0068]
进一步的,气体污染物的排放监测数据按照比排放的方法对各类污染物的比排放值进行换算。
[0069]
以no
x
的比排放值计算为例,其具体换算公式如下:
[0070][0071]
式中代表no
x
的比排放值,单位g/(kw
·
h);代表no
x
的浓度百分数;k
hd
代表湿度修正系数;m
混
代表单位功率排气流量,单位为g/(kw
·
h),如下式所示:
[0072][0073]
式中:b为单位时间油耗量,单位g/h;t为扭矩,单位n
·
m;n为转速,单位r/min;为氧气的浓度百分数。上述换算关系也适用于对sox与co2的换算过程。
[0074]
在一些具体的实施例中,所述船岸信号交互单元通过5g传输技术实现船端与岸端之间的数据信息相互传输过程,进一步的,所述船岸信号交互单元能够实现数据信息存储与处理单元处理后的数据信息与岸端污染物综合智能监控平台的信息交互。
[0075]
在一些具体的实施例中,所述船端综合智能监测报警单元包括:参数实时显示模块、船端超限智能报警模块、船端功能控制模块;其中,所述参数实时显示模块能够实时显示当前各污染物排放数据与船舶运行状态数据,即所述参数实时显示模块主要负责显示当前各个污染物排放的具体数值与船舶运行实时数据,方便操作人员观测排放具体数值;所述船端超限智能报警模块能够在污染物排放量超限时进行超限报警;所述船端功能控制模块能够对所获取污染物数据与船舶运行实时数据进行分析与评估,并完成自身智能控制过程,所述自身智能控制的过程包括:自检过程、解除超限报警过程、与监管网络内的海事监管部门通信、接收违规排放警告过程。其中,所述的超限智能报警模块可将某一污染物排放量大于设定的限值(相关法律标定上限值)的超限报警信号自动发送给岸端海事监管部门。
[0076]
在一些具体的实施例中,所述岸端污染物综合智能监控平台包括:岸端参数实时显示模块、历史记录模块、记录对比模块、综合实时监测模块、岸端超限智能报警模块、岸端功能控制模块;其中,所述岸端参数实时显示模块能够实时显示当前各污染物排放数据与船舶运行状态数据;所述历史记录模块能够存储记录各污染物排放数据与船舶运行状态数据以形成排放记录,如以表格的形式实现排放记录;所述记录对比模块能够按照所选定的维度对各污染物排放量进行对比分析并显示,以实现不同时间、不同地点的各污染物排放量的对比分析与显示,所述的维度至少包括时间维度以及地理位置维度;所述综合实时监测模块能够实时显示各污染物排放量变化趋势以清晰地显示各污染物排放量变化趋势;所述岸端超限智能报警模块能够在污染物排放量超限时进行超限报警,并向海事监管部门反馈超限报警信息(船舶污染物排放数据与船舶运行实时参数);所述岸端功能控制模块能够对所获取污染物数据与船舶运行实时数据进行分析与评估,完成自身基本控制过程,所述自身基本控制的过程包括:启动关闭过程、自检过程(自动确认各个传感器、软件是否正常工作)、解除超限报警过程(当排放值低于限值时系统消除超限报警)、与监管网络内的船舶通信、发送违规排放警告过程(当排放值高于限值时系统自动进行统计分析,将超限原因发
送至海事监管部门)。在更进一步的实施例中,该单元还包括设置模块对系统进行一些常规设置,包括显示文字大小、超限报警形式等。
[0077]
所述污染物超限值的设置可以参考:即基于《船舶发动机排气污染物排放量限值及测量方法》)(gb15097
‑
2016)、《船舶污染物排放标准》(gb3552
‑
83)、imo marpol73/78公约自动获取不同通航环境与不同运输条件下的船舶污染物排放限值,具体如下:
[0078]
a1、如使用主管机关认可的废气滤清系统的船舶推进机械,其so2排放限值自动设定为6.0g/(kw
·
h)。
[0079]
a2、对于在航船舶,无论何种情况,其co2排放限值自动设定为10.0g/(kw
·
h)。
[0080]
a3、对2000年1月1日或以后在船上安装的柴油机或经重大改装的柴油机输出功率超过130kw,以及2011年1月1日及以后建造的船上安装的船用柴油机。其nox排放限值确定如下:
[0081]
a31、当主机转速n小于130r/min,nox排放限值自动设定为17.0g/(kw
·
h)。
[0082]
a32、当主机转速n大于等于130r/min,但小于2000r/min,no
x
排放限值自动设定为45
·
n
‑
0.2
g/(kw
·
h)。
[0083]
a33、当主机转速n大于等于2000r/min时,no
x
排放限值自动设定为9.8g/(kw
·
h)。
[0084]
a4、对于在航船舶,生活污水排放限值确定如下:
[0085]
a41、当船舶距最近陆地4n mile以内,其生化需氧量排放限值自动设定为50mg/l,悬浮物排放限值自动设定为150mg/l,大肠菌群排放限值自动设定为250个/100ml。
[0086]
a42、当船舶距最近陆地4
‑
12n mile时,要求海面无明显悬浮物,大肠菌群排放限值自动设定为1000个/100ml。
[0087]
a5、对于在航船舶,其含油污水排放限值确定如下:
[0088]
a51、船舶在内河或距最近陆地12n mile以内航行时,其浓度排放限值自动设定为15mg/l。
[0089]
a52、船舶在内河或距最近陆地12n mile以外航行时,其浓度排放限值自动设定为100mg/l。
[0090]
a6、未经粉碎的禁止在距最近陆地12n mile以内投弃入海,在距最近陆地3n mile处,可排放的经过粉碎且颗粒直径排放限值自动设定为25mm。
[0091]
此外,为解决传统技术存在的不足,还提出了一种船舶污染物排放综合智能监控方法,其特征在于:
[0092]
s1、通过船端污染物数据采集单元与船舶运行实时数据采集单元,获取污染物排放数据与船舶运行状态数据;
[0093]
s2、通过数据信息存储与处理单元接收并处理船端污染物数据采集单元与船舶运行实时数据采集单元返回的数据;
[0094]
s3、通过船端综合智能监测报警单元实时监测并统计污染物排放数据,并与污染物排放限值进行对比分析,基于所设定的船端显示与智能决策策略,进行数据显示、超限报警并控制对应的船舶执行单元实现污染物的超排控制;
[0095]
所述的船端显示与智能决策策略包括:比较分析当前的污染物排放量、历史平均排放量、污染物排放限值之间的数据关系;若当前的污染物排放量高于历史平均排放量的20%且低于污染物排放限值时,船端综合智能监测报警单元自动显示船舶污染物排放数
据、船舶实时运行数据与所设定的排放控制智能决策方案,并向对应的船端操作人员发出提醒警示,以便于船端操作人员按照排放控制智能决策方案进行相应的减排控制操作;若当前的污染物排放量高于设定的污染物排放限值时,进行超限报警同时向海事监管部门反馈超限报警信息,并实现超限分析与智能决策减排方案;若污染物排放量低于污染物排放限值时,系统正常运行;
[0096]
s4、在船端发生报警情况时,通过船端综合智能监测报警单元切断排放源并消除警报;同时岸端海事监管部门通过岸端超限智能报警模块与所述船岸信号交互单元自动向该船舶发送违规排放警告。
[0097]
在其中一个具体实施例中,所述排放控制智能决策方案的获取过程包括:
[0098]
将船舶污染物数据超过报警限值的数据作为异常值数据,并对该异常值数据进行分析(如聚类分析)以及特征提取,以确定出对应的超排原因并给出该超排原因对应的解决方案。
[0099]
在其中一个具体实施例中,将船舶污染物数据超过报警限值的数据作为异常值数据,并对该异常值数据进行聚类分析,以确定出对应的超排原因并给出该超排原因对应的解决方案过程包括:
[0100]
(1)、定义异常值数据集为d={x1,x2,......x
m
},且每个x
i
∈r,其中x
i
表示在船舶运行时船端污染物数据采集单元与船舶运行实时数据采集单元所采集的各项实时数据,其包括so2浓度数据、co2浓度数据、no
x
浓度数据、船底油污水浓度数据、生活污水浓度数据、洗舱水浓度数据、固体垃圾排放量数据、船舶位置数据、船舶航速数据、主机转速数据、主机功率数据、排气压力数据、排气温度数据、船舶油耗数据、中冷器温度数据;
[0101]
(2)、随机选取k个初始质心以及对应的分簇,其中,初始质心表示为u={u1,u2,......u
k
},对应的分簇表示为c={c1,c2,......c
k
};其中k值为导致污染物超排的原因的数量,每一分簇由围绕质心分布的船端污染物数据与船舶运行实时数据异常值数据样本点组成;
[0102]
(3)、对于每个异常值数据样本点,遍历k个质心,通过下式计算得到距离任意异常值数据样本点x
i
最近的质心u
j
,将异常值数据样本点x
i
的类别设置为质心u
j
所对应的簇类,即;
[0103]
c
i
=arg min||x
i
‑
u
j
||2ꢀꢀꢀ
(3)
[0104]
(4)、更新完所有异常值数据样本点类别之后,再次遍历每个簇类中所有的异常值数据样本点,通过下式计算该类新的质心,即;
[0105][0106]
(5)、不断重复步骤(3)和(4),直至所有的异常值数据样本点不再被分配或质心不再变化,则本算法结束;并最后得到k簇结果,每一簇结果都有高度相似的特征,不同的簇则对应船舶不同的超排原因;
[0107]
(6)、利用小波变换对不同簇的数据信号去噪,再对去噪后的数据信号进行多尺度分析,提取数据信号在不同尺度上的特征从而进行智能决策,通过在监控系统中针对每一
超排原因内置相应的解决方法,并将其作为排放异常智能决策处理知识库,此知识库以数据库的形式进行存储;具体的包括对经过小波变换的污染物数据信号进行频段分析,并分别以各个频带的能量作为其离散数据特征的特征向量(如在python中,scipy提供了一些信号处理的函数进行特征向量获取。在matlab中,有相应的小波工具箱进行获取),将其与排放异常智能决策处理知识库的数据特征进行对比,结合船舶位置传感器发送的船舶实时位置与船舶主机转速信息,确定出其具体超排原因及解决方案;其中所述的排放异常智能决策处理知识库包括三个维度,分别为数据信号特征、对应的超排原因、对应的解决方案;本例中获取了8个特征向量,具体解决方案形式如下:
[0108][0109][0110]
可选的,在其中一个实施例中,确定出其具体超排原因及解决方案具体步骤如下:
[0111]
(61)、选择daubechies小波作为小波基函数,固定尺度因子a;
[0112]
(62)、通过下式计算小波系数:
[0113]
[0114]
式中,wt
x
(a,τ)为所求小波系数;a为尺度因子,其作用是对小波基函数作伸缩;τ为平移因子;x(t)为待测数据信号;t表示时间。
[0115]
(63)、对污染物数据信号采用小波阈值去噪,阈值的确定方法为极大极小阈值选择方法。确定阈值后,使用硬阈值去噪法对含有噪声系数的小波系数进行过滤,去除其高斯噪声系数,即当小波系数的绝对值小于给定阈值时,令其为零;大于阈值时,则令其保持不变,对应的公式如下:
[0116][0117]
式中,w为小波系数,λ为相应阈值。
[0118]
(64)、将经过阈值处理后的小波系数重构,得到去噪后的信号;
[0119]
(65)、以τ0为步长连续改变平移因子τ,使小波沿时间轴位移,重复上述(61)
‑
(64)步骤,完成第一次分析;
[0120]
(66)、以a0为步长连续增加尺度因子a以对小波基进行尺度变换,重复上述步骤(62)
‑
(65),完成第二次分析;
[0121]
(67)、循环上述步骤(61)
‑
(66),直至某一时域污染物数据信号全部分析完毕。
[0122]
上述解决方案可参考基于《船舶发动机排气污染物排放量限值及测量方法》)gb15097
‑
2016)、《船舶污染物排放标准》(gb3552
‑
83)、imo marpol73/78公约,确定最佳的排放控制决策方案。
[0123]
以上所述实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本申请专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1