用于无级变速器的高保真高容错的增量编码器测量方法与流程
1.本发明涉及增量编码器技术领域,尤其涉及一种用于无级变速器的高保真高容错的增量编码器测量方法。
背景技术:
2.增量编码器广泛应用于高性能电机驱动中。但是其在操作过程中容易遇到问题和高度干扰,这样会造成编码器脉冲的误读,进而导致出现错误的信号。并且在编码器计数器收到z 脉冲而重置时,角度误差可能会不断累积,从而造成驱动过流,甚至会导致驱动器跳闸然后电机停止工作。
技术实现要素:
3.本发明所要解决的技术问题是:提供一种用于无级变速器的高保真高容错的增量编码器测量方法,采用这种方法检测准确且可以有效防止过流。
4.本发明所采用的技术方案是:一种用于无级变速器的高保真高容错的增量编码器测量方法,它包括以下步骤:
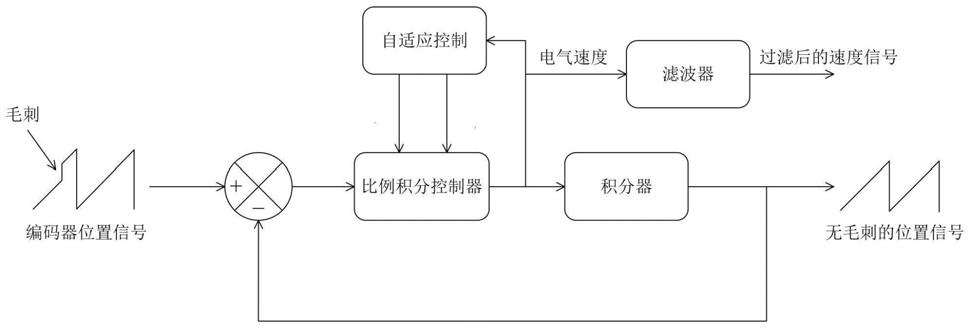
5.s1、编码器采集到需要矫正的位置信号s(t);
6.s2、将s(t)和最终位置信号c(t)做比较,产生的误差e(t)=s(t)
‑
c(t),并且将产生的误差e(t)输入到pi控制器,输出一个速度信号v(t);
7.s3、v(t)作为输入信号通过自适应控制,产生对应的pi参数反馈给pi控制器;与此同时,对v(t)进行滤波,可得到能用于速度环的速度信号v'(t);与此同时,v(t)通过一个积分器输出新的最终位置信号c'(t)。
8.作为优选,pi控制器为:v(t)=e
总
(t)*ki+e(t)*kp,且pi参数包括kp与ki,其中,kp 为比例系数,ki为积分系数,e
总
(t)为误差总和。
9.作为优选,步骤s3所述自适应控制是指
[0010][0011]
ki=kp*bw/tan(pm)
[0012]
其中,kp为比例系数,ki为积分系数,bw为带宽,pm为相位裕度,且相位裕度为设定的定值,带宽与速度成正比。
[0013]
作为优选,所述滤波采用低通滤波器进行滤波。
[0014]
采用以上方法与现有技术相比,本发明具有以下优点:通过基于速度的带有变量优化的锁相环,将编码器位置作为输入,可以输出没有毛刺的位置和已经被过滤的速度信号。这样做的目的是将误差“分散”在几个采样周期中,从而达到与磁场定向控制位置再校准的无缝对接,进而使得测量准确,且可以有效的防止过流。
附图说明
[0015]
图1为本发明的用于无级变速器的高保真高容错的增量编码器测量方法的控制框
图。
具体实施方式
[0016]
以下通过具体实施方式对本发明做进一步描述,但是本发明不仅限于以下具体实施方式。
[0017]
一种用于无级变速器的高保真高容错的增量编码器测量方法,首先其硬件部分包括了包括以下部分
[0018]
1、带a,b和z脉冲的增量编码器;
[0019]
2、一个数字信号处理器用于处理编码器信号和接收z脉冲来复原最初的校准位置;
[0020]
位置传感器的信号经过信息系统过滤,能达到以下目的:
[0021]
用位置传感器检测问题;
[0022]
能够补偿经过几个采样周期产生的位置误差,从而防止过流。
[0023]
其方法包括以下步骤:
[0024]
s1、编码器采集到需要矫正的位置信号s(t);即增量编码器采集到带有毛刺或畸变的位置信号s(t);
[0025]
s2、将s(t)和最终位置信号c(t)做比较,产生的误差e(t)=s(t)
‑
c(t),并且将产生的误差e(t)输入到pi控制器,输出一个速度信号v(t);其中最终位置信号c(t)为上一次得到的最终位置信号,即上一次测得的那个去毛刺后的位置信号,如果没有上一次的最终位置信号,则表示没有误差;pi控制器为比例积分控制器,其控制逻辑是:v(t)=e
总
(t)*ki+e(t)*kp, kp为比例系数,ki为积分系数,e
总
(t)为误差总和,即输出(速度)=误差总和 (e(t)+e(t
‑
ts)+e(t
‑
2ts)+.....)乘以积分系数+当前误差e(t)乘以比例系数;
[0026]
s3、v(t)作为输入信号通过自适应控制,产生对应的pi参数反馈给pi控制器,具体的自适应控制是指:
[0027]
ki=kp*bw/tan(pm);
[0028]
其中,kp为比例系数,ki为积分系数,bw为带宽,pm为相位裕度,且相位裕度为设定的定值,带宽与速度成正比,在本具体实施例中,设定pm为60,且bm(hz)*100=v(t)(rpm),输入的速度值改变了,则根据自适应带宽也改变了,使得比例系数与积分系数均改变了,进而达到自适应控制pi控制器的效果;与此同时,采用低通滤波器对v(t)进行滤波,公式为 1/(ts+1),这样可以消除高频杂波,可得到能用于速度环的速度信号v'(t);与此同时,v(t) 通过一个积分器输出新的最终位置信号c'(t),该积分器为是ki2/s,目的是对输出信号v(t) 进行积分。
[0029]
而且因为编码器就是根据角度信息来得到位置信息的,因此修正位置信号即修正角度信号。受锁相环原理启发,假设已得到的最终输出的角度信号为θ0,新的输入的角度信号为θ1, 比例积分控制器的输入为sin(θ1‑
θ0),比例积分控制器输出y为:
[0030]
y=sin(θ1‑
θ0)*(kp+ki/s),接下来,使用积分器对y进行积分,假设当前y的总和为 y
总
(t),将要得到的最终输出角度信号θ2为:θ2=y
总
(t)=y(t)+y(t
‑
t
s
)+y(t
‑
2t
s
)+......。
[0031]
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的技术人员应当理解,其依然可以对
前述实施例所记载的技术方案进行修改,或者对其中部分技术特征进行同等替换;而这些修改或者替换,并不使相应的技术方案的本质脱离本发明各实施例技术方案的精神与范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1