行驶路径生成装置以及控制装置的制作方法
1.本公开涉及行驶路径生成装置以及控制装置。
2.本技术基于在2019年6月18日日本技术的日本特愿2019-112892号来主张优先权,在此引用其内容。
背景技术:
3.在下述专利文献1中公开了无人自主行驶的车辆的行驶控制方法。在该行驶控制方法中,在通过有人操纵使其行驶在实际行驶路线并获取行驶路径的位置信息之后,基于该位置信息使车辆自主行驶。
4.现有技术文献
5.专利文献
6.专利文献1:日本专利第2662946号公报
技术实现要素:
7.然而,有在行驶路径中存在有事故风险的场所(以下称为“危险场所”)的情况。但是,在上述专利文献1中,在进行自主行驶时,没有考虑危险场所,对于实现搬运车辆的安全行驶方面还有改进的余地。
8.本公开是鉴于这样的情况而完成的,其目的在于提供一种能够使车辆更安全地行驶的行驶路径生成装置以及控制装置。
9.本公开的第一方式是一种行驶路径生成装置,具备:行驶路径获取部,其获取用于使移动体自主行驶或者通过远程操纵而行驶的行驶路径的位置信息;周围信息获取部,其获取所述移动体的周围的信息即周围环境信息;危险场所检测部,其在所述移动体在所述行驶路径上行驶时,从所述周围环境信息检测有事故风险的危险场所;以及信息处理部,其对与所述危险场所检测部检测出的所述危险场所对应的所述位置信息附加包含表示所述危险场所的第一信息的危险场所信息。
10.作为本公开的第二方式,在上述第一方式的行驶路径生成装置中,也可以是,所述危险场所是有道路标志的第一危险场所和所述移动体及障碍物接近的第二危险场所中的至少一个以上。
11.作为本公开的第三方式,在上述第一方式或第二方式的行驶路径生成装置中,也可以是,所述信息处理部对与所述危险场所检测部检测出的所述危险场所对应的所述位置信息附加还包含表示用于降低在所述危险场所的风险的所述移动体的动作的第二信息的所述危险场所信息。
12.本公开的第四方式是一种控制装置,具备:上述第一方式或者第二方式的行驶路径生成装置;以及行驶控制装置,其使所述移动体自主行驶或者通过远程操纵而行驶,所述行驶控制装置在所述移动体在附加有所述危险场所信息的所述位置信息的位置行驶时,控制所述移动体的行驶,以使所述移动体的行驶速度减速到规定的速度以下。
13.本公开的第五方式是一种控制装置,具备:上述第三方式的行驶路径生成装置;以及行驶控制装置,其使所述移动体自主行驶或者通过远程操纵来行驶,其所述行驶控制装置在所述移动体在附加有所述危险场所信息的所述位置信息的位置行驶时,根据附加于所述位置信息的所述第二信息来控制所述移动体的行驶。
14.如以上说明的那样,根据本公开,能够使车辆更安全地行驶。
附图说明
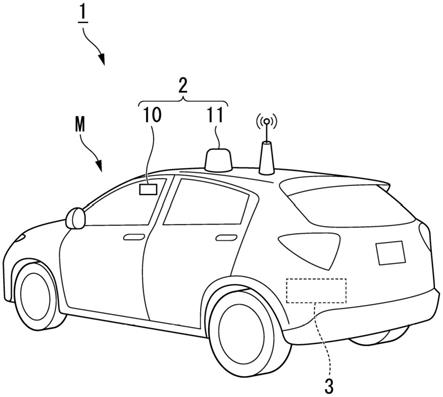
15.图1是表示本实施方式的行驶控制系统的概要结构的图。
16.图2是表示本实施方式的控制装置的概要结构的图。
17.图3是说明本实施方式的危险场所的图。
18.图4是以表格形式表示本实施方式的储存部中储存的路线信息的一个例子的图。
19.图5是说明本实施方式的路线信息的生成处理的动作的流程的图。
20.图6a是表示本实施方式的危险场所信息的变形例的图。
21.图6b是表示本实施方式的危险场所信息的变形例的图。
具体实施方式
22.以下,使用附图对本实施方式的行驶路径生成装置以及具备该行驶路径生成装置的控制装置进行说明。
23.图1是表示本实施方式的行驶控制系统1的概要结构的图。
24.本实施方式的行驶控制系统1通过控制移动体的行驶,来进行车辆、机器人等移动体的自主驾驶。在本实施方式中,移动体是车辆m。车辆m既可以是有人,也可以是无人。车辆m可以是一般车辆,也可以是搬运集装箱的搬运车辆(半挂车或全挂车),也可以是土木工程或建筑工程中使用的铲车、推土机或起重车等工程机械。
25.行驶控制系统1具备周围测量装置2和控制装置3。
26.周围测量装置2测量车辆m的周围的信息。在本实施方式中,周围测量装置2具备相机10以及距离传感器11。
27.相机10拍摄车辆m的周围(前方、侧方、后方等)。相机10将拍摄图像(图像数据)发送到控制装置3。
28.距离传感器11测量至车辆m的周围的物体的距离。例如,距离传感器11是激光测距仪(lrf)或激光雷达等二维或三维的测量装置,测量车辆m的周围的形状。该周围的形状例如是存在于通行路的地面、周围的构造物的立体形状。即,车辆m的周围的形状是指包围车辆m的构造物的立体形状。更具体而言,例如,距离传感器11针对测量范围在水平方向或垂直方向上扫描激光,根据该激光的反射光获取该测量范围内的多个测量点的三维坐标值。由此,对车辆m的周围进行三维测量。距离传感器11将测量数据发送至控制装置3。
29.控制装置3具备:路径获取模式,在车辆m以有人操纵在行驶路径h上行驶的情况下,获取该行驶路径h的位置信息;以及自主行驶模式,基于以路径获取模式获取的位置信息来控制车辆m的行驶,从而使车辆m沿着行驶路径h自主行驶。
30.以下,对本实施方式的控制装置3的结构进行说明。
31.图2是表示本实施方式的控制装置3的概要结构的图。
32.控制装置3具备行驶路径生成装置4以及行驶控制装置5。行驶路径生成装置4可以由cpu或mpu等微处理器、mcu等微控制器等构成。
33.行驶路径生成装置4具备位置信息获取部20、行驶路径获取部21、周围信息获取部22、危险场所检测部23、信息处理部24以及储存部25。位置信息获取部20、行驶路径获取部21、周围信息获取部22、危险场所检测部23、信息处理部24以及储存部25中的全部或者一部分是由cpu(central processing unit:中央处理单元)、ram(random access memory:随机存取存储器)、rom(read only memory:只读存储器)等主存储装置、ssd(solid state drive:固态驱动器)、hdd(hard disc drive:硬盘驱动器)等辅助存储装置等构成的一种计算机。
34.位置信息获取部20获取车辆m的当前位置的信息(以下,称为“位置信息”)pm。例如,位置信息获取部20也可以使用gps(global positioning system:全球定位系统),从而以全局坐标获取车辆m的位置信息pm。但是,本公开并不限定于此。例如,位置信息获取部20也可以使用上述测量数据(点群数据)进行应用了icp算法的扫描匹配,来获取车辆m的位置信息pm。此外,位置信息获取部20也可以利用rfid、磁传感器等获取自身位置。即,在本公开中,获取位置信息获取部20中的位置信息pm的方法没有特别限定。位置信息获取部20能够使用各种公知技术获取车辆m的位置信息pm。
35.行驶路径获取部21在路径获取模式中获取用于使车辆m自主行驶或者通过远程操纵而行驶的行驶路径h的位置信息(以下,称为“路线信息”)pc。例如,行驶路径获取部21在路径获取模式中,在车辆m利用有人而在行驶路径h上行驶的情况下以时间序列获取来自位置信息获取部20的位置信息pm来获取路线信息pc。即,在车辆m利用有人而在行驶路径h上行驶时得到的位置信息pm成为路线信息pc。
36.但是,行驶路径获取部21只要能够获取路线信息pc即可,其路线信息pc的获取方法没有特别限定。行驶路径获取部21例如也可以从外部(车辆m的外部)的装置获取路线信息pc。
37.周围信息获取部22获取周围环境信息即车辆m的周围的信息。具体而言,周围信息获取部22在路径获取模式中,配合路线信息pc的获取,获取来自相机10的拍摄图像以及来自距离传感器11的测量数据作为周围环境信息。例如,周围信息获取部22在路径获取模式中,将每隔一定周期获取的路线信息pc与周围环境信息(拍摄图像以及测量数据)相关联。
38.这样,周围信息获取部22在从行驶路径h的起点到终点之间获取车辆m的周围的信息即周围环境信息。
39.如图3所示,危险场所检测部23在车辆m在行驶路径h上行驶时,从周围环境信息检测存在事故风险的危险场所pd。该危险场所pd是后述的危险场所pd1和危险场所pd3中的至少一个以上。即,危险场所pd既可以是危险场所pd1,也可以是危险场所pd3,也可以包含危险场所pd1以及危险场所pd3的双方。另外,上述危险场所pd也可以还包括后述的危险场所pd2。在此,危险场所pd1是有人行横道、暂时停止等道路标志的场所。危险场所pd2是发生路面凹凸、裂纹以及车辙挖掘中的任何一个场所。危险场所pd3是车辆m与障碍物接近的场所。例如,危险场所pd3是车辆m与障碍物的距离为阈值以下的场所。
40.另外,危险场所pd1是本公开的“第一危险场所”的一个例子。危险场所pd3是本公开的“第二危险场所”的一个例子。
41.例如,危险场所检测部23通过应用公知的技术来从周围环境信息检测道路标志。例如,危险场所检测部23通过应用“汽车技术会论文集,2014年45卷6号p.1165-1170”中记载的方法,能够从测量数据检测道路标志。
42.而且,危险场所检测部23将从周围环境信息检测出的道路标志的位置设定为危险场所pd1,并从与该周围环境信息相关联的位置信息pm等检测该危险场所pd1。换言之,危险场所检测部23基于周围环境信息中的表示道路标志的特定的周围环境信息,设定危险场所pd1,基于从行驶路径h的起点到终点以时间序列获取的车辆m的位置信息pm(或行驶路径h的路线信息pc)中的与该特定的周围环境信息相关联的特定的位置信息pm(或特定的路线信息pc等),检测行驶路径h上的危险场所pd1的位置。
43.例如,危险场所检测部23通过应用公知的技术,从拍摄图像、测量数据检测路面的状态(路面凹凸、裂纹、以及车辙挖掘等)。例如,危险场所检测部23通过应用“土木学会论文集、2015年70卷3号p.i_9-i_16”、“土木学会论文集、2013年69卷3号p.i_9-i_16”中记载的方法,能够从拍摄图像、测量数据检测路面的状态(路面凹凸、裂纹、以及车辙挖掘等)。
44.而且,危险场所检测部23将从周围环境信息检测出的路面凹凸、裂纹以及车辙挖掘的任何一个位置设定为危险场所pd2,从与该周围环境信息相关联的位置信息pm等来检测该危险场所pd2。换言之,危险场所检测部23基于周围环境信息中的表示路面凹凸、裂纹以及车辙挖掘的特定的周围环境信息,设定危险场所pd2,基于从行驶路径h的起点到终点以时间序列获取的车辆m的位置信息pm(或者行驶路径h的路线信息pc)中的与该特定的周围环境信息相关联的特定的位置信息pm(或者特定的路线信息pc等),检测行驶路径h上的危险场所pd2的位置。
45.例如,危险场所检测部23也可以通过应用公知的技术,从而从拍摄图像、测量数据来测量车辆m与障碍物的距离。而且,例如,危险场所检测部23在车辆m与障碍物的距离为阈值以下的情况下判定为该车辆m正在接近障碍物,将该车辆m的位置信息pm检测为第三危险场所。换言之,危险场所检测部23基于周围环境信息中的车辆m与障碍物的距离为阈值以下的特定的周围环境信息,设定危险场所pd3,基于从行驶路径h的起点到终点以时间序列获取的车辆m的位置信息pm(或行驶路径h的位置信息pc等)中的与该特定的周围环境信息相关联的特定的位置信息pm(或特定的路线信息pc等),检测行驶路径h上的危险场所pd3的位置。
46.信息处理部24对与危险场所检测部23检测出的危险场所pd对应的路线信息pc附加包含表示危险场所pd的第一信息的危险场所信息,并储存于储存部25。例如,信息处理部24将与危险场所检测部23检测出的危险场所pd对应的路线信息pc和包含表示危险场所pd的第一信息的危险场所信息相关联,并储存于储存部25。
47.例如,在路线信息pc1~pc11中的路线信息pc3以及路线信息pc4是与危险场所pd1对应的位置的情况下,信息处理部24对路线信息pc3以及路线信息pc4附加危险场所信息。例如,在路线信息pc1~pc11中的路线信息pc10以及路线信息pc11是与危险场所pd3对应的位置的情况下,信息处理部24对路线信息pc10以及路线信息pc11附加危险场所信息。例如,在路线信息pc1~pc11中的路线信息pc7以及路线信息pc8是与危险场所pd2对应的位置的情况下,信息处理部24也可以对路线信息pc7以及路线信息pc8附加危险场所信息。
48.储存部25储存路线信息pc。图4是以表格形式表示储存部25中储存的路线信息pc
的一个例子的图。在储存部25中设置有路线信息表。例如,储存部25是非易失性存储器。
49.在路线信息表中,将各路线信息pc和表示该各路线信息pc是否为危险场所pd的危险场所信息相关联地储存。各路线信息pc是指按时间序列获取的多个路线信息pc1、pc2、
…
的各个路线信息。换言之,在路线信息表中,将行驶路径h上的各位置信息pm和表示该各位置信息pm是否为危险场所pd的危险场所信息相关联地储存(由位置信息pm获取路线信息pc的情况)。各位置信息pm是指按时间序列获取的多个位置信息的各个位置信息。另外,在本实施方式中,不与危险场所信息相关联的路线信息pc表示不是危险场所pd。
50.行驶控制装置5基于储存于储存部25的路线信息pc,使车辆m自主行驶或者通过远程操纵来行驶。在本实施方式中,行驶控制装置5在自主行驶模式下,基于储存于储存部25的路线信息pc,使车辆m自主行驶。
51.具体而言,行驶控制装置5在自主行驶模式下,控制车辆m的加速器ac、制动器br以及方向盘st以使车辆m沿着储存于储存部25的路线信息pc行驶。而且,行驶控制装置5在车辆m在附加有危险场所信息的路线信息pc的位置行驶时,使车辆m的行驶速度减速到预定的速度以下。附加有危险场所信息的路线信息pc的位置是指按时间序列获取的路线信息pc1、pc2、
···
中的附加有危险场所信息的特定路线信息pc所表示的、行驶路径h上的特定位置。
52.此外,行驶控制装置5也可以在车辆m在附加有危险场所信息的路线信息pc的位置行驶的情况下,将表示车辆m正在危险场所pd行驶的通知以无线的方式发送到远程监视者的终端。远程监视者的终端是用于远程监视车辆m的监视者监视车辆m的终端。
53.此外,行驶控制装置5也可以在车辆m在附加有危险场所信息的路线信息pc的位置行驶的情况下,通过警报音、广播等对周围输出警告。
54.以下,使用图5对本实施方式的行驶路径生成装置4的动作的流程进行说明。图5是说明本实施方式的路线信息pc的生成处理的动作的流程的图。
55.例如,驾驶员操作设于行驶路径生成装置4的操作部(未图示)。由此,使行驶路径生成装置4转移到路径获取模式。而且,驾驶员驾驶车辆m在想要使车辆m自主行驶的行驶路径h上行驶。由此,使行驶路径生成装置4学习该行驶路径h。
56.具体而言,行驶路径获取部21若被转移到路径获取模式,则通过从位置信息获取部20按时间序列获取位置信息pm(步骤101),来记录行驶路径h的路线信息pc(步骤s102)。换言之,行驶路径获取部21将从位置信息获取部20按时间序列获取的车辆m的位置信息pm记录为行驶路径h的路线信息pc。进而,周围信息获取部22在步骤s101中,配合路线信息pc的获取,获取来自相机10的拍摄图像和来自距离传感器11的测量数据作为周围环境信息。另外,在路径获取模式下获取的路线信息pc与周围环境信息相关联。
57.另外,若行驶路径h的行驶完成,则驾驶员操作上述操作部(未图示)而结束路径获取模式。
58.接着,危险场所检测部23基于周围环境信息,检测存在事故风险的危险场所pd(步骤s103)。另外,危险场所检测部23既可以在路径获取模式下实时地进行危险场所pd的检测处理,也可以在路径获取模式完成之后进行。换言之,在路径获取模式中,既可以一边从周围信息获取部获取周围环境信息一边检测危险场所pd,也可以在路径获取模式结束后,从以时间序列获取的周围环境信息来检测危险场所pd。
59.若危险场所检测部23中的危险场所pd的检测处理完成,则信息处理部24对与该危险场所pd对应的路线信息pc附加包含表示危险场所pd的第一信息的危险场所信息,并储存到储存部25。例如,信息处理部24将与危险场所检测部23检测出的危险场所pd对应的路线信息pc和危险场所信息相关联,储存在储存部25中(步骤s104)。
60.由此,本实施方式的路线信息pc的生成处理完成。
61.以上,参照附图对本发明的实施方式进行了详细叙述,但具体的结构不限于该实施方式,也包括不脱离该公开的主旨的范围的设计等。
62.(变形例1)
63.在上述实施方式中,周围信息获取部22配合路线信息pc的获取,获取拍摄图像以及测量数据作为周围环境信息,但并不限定于此。周围信息获取部22也可以配合路线信息pc的获取,获取拍摄图像和测量数据中的任一个作为周围环境信息。
64.(变形例2)
65.在上述实施方式中,第一信息也可以是表示危险场所类别的信息。例如,在危险场所检测部23检测出的危险场所pd1是人行横道的道路标志的情况下,如图6a所示,信息处理部24也可以对与该人行横道的道路标志对应的路线信息pc附加表示是人行横道的信息(表示危险场所pd1基于人行横道的道路标示的信息)作为第一信息。此外,在危险场所检测部23检测出的危险场所pd2为路面凹凸的情况下,如图6a所示,信息处理部24也可以对与该路面凹凸对应的路线信息pc附加表示路面凹凸的信息(表示危险场所pd2基于路面凹凸的信息)作为第一信息。再有,在是危险场所检测部23检测出的危险场所pd3的情况下,如图6a所示,信息处理部24也可以对与该危险场所pd3对应的路线信息pc附加表示是危险场所pd3(车辆m与障碍物的接近)的信息(表示危险场所pd3基于车辆m与障碍物的接近的信息)作为第一信息。
66.(变形例3)
67.上述信息处理部24也可以对与危险场所检测部23检测出的危险场所pd对应的路线信息pc附加还包含表示用于降低在该危险场所pd的风险的车辆m的动作的第二信息的危险场所信息。例如,如图6b所示,信息处理部24也可以对与危险场所检测部23检测出的危险场所pd1对应的路线信息pc附加表示暂时停止的动作、减速动作的信息作为表示用于降低在该危险场所pd1的风险的车辆m的动作的第二信息。此外,如图6b所示,信息处理部24也可以对与危险场所检测部23检测出的危险场所pd2(路面凹凸)对应的路线信息pc附加表示回避动作的信息作为表示用于降低在该危险场所pd2处的风险的车辆m的动作的第二信息。该回避动作是以避开危险场所pd2的方式行驶的动作。此外,如图6b所示,信息处理部24也可以对与危险场所检测部23检测出的危险场所pd3对应的路线信息pc附加表示减速动作的信息作为表示用于降低在该危险场所pd3的风险的车辆m的动作的第二信息。
68.由此,行驶控制装置5在自主行驶模式中,在基于储存于储存部25的路线信息pc使车辆m自主行驶时,读取第二信息,进行与各危险场所pd对应的动作。由此,能够降低事故风险。
69.(变形例4)
70.在上述控制装置3通过远程操纵来控制车辆m的行驶的情况下,行驶控制装置5在车辆m在危险场所pd行驶的情况下,也可以将车辆m的行驶速度强制性地限制为预定的速度
以下。再有,行驶控制装置5在车辆m在危险场所pd行驶的情况下,可以通知远程操纵者,也可以对周围通过警报音、广播等输出警告。
71.(变形例5)
72.在上述实施方式中,作为危险场所pd,以3种危险场所(危险场所pd1、危险场所pd2、危险场所pd3)为例进行了说明,但本公开不限于此。在本公开中,只要将有事故风险的场所检测为危险场所pd即可,该危险场所的种类、数量没有特别限定。
73.(变形例6)
74.上述危险场所pd1既可以是有道路标志的场所,也可以是有行驶道路标识的场所,也可以是其双方。
75.如上所述,本实施方式的行驶路径生成装置4对与危险场所检测部23检测出的危险场所pd对应的路线信息pc附加包含表示危险场所pd的第一信息的危险场所信息。
76.根据这样的结构,在基于路线信息pc使车辆m自主行驶的情况下,能够根据对该路线信息pc附加的危险场所信息来掌握危险场所pd,能够使车辆m安全地自主行驶。
77.另外,也可以通过计算机实现上述的行驶路径生成装置4的全部或一部分。在该情况下,上述计算机也可以具备cpu、gpu等处理器以及计算机可读记录介质。而且,也可以通过将用于由计算机实现上述行驶路径生成装置4的全部或一部分功能的程序记录在上述计算机可读记录介质中,使上述处理器读取并执行记录在该记录介质中的程序来实现。在此,“计算机可读记录介质”是指软盘、光磁盘、rom、cd-rom等可移动介质、内置于计算机系统的硬盘等存储装置。再有,“计算机可读记录介质”也可以包括如经由互联网等网络或电话线路等通信线路发送程序的情况下的通信线那样在短时间内动态地保持程序的介质、如成为该情况下的服务器或客户端的计算机系统内部的易失性存储器那样保持一定时间程序的介质。此外,上述程序可以是用于实现前述的功能的一部分的程序,还可以是能够通过与已经记录在计算机系统中的程序的组合来实现前述的功能的程序,也可以使用fpga等可编程逻辑器件来实现的程序。
78.产业上利用可能性
79.根据本公开,能够使车辆更安全地行驶。
80.附图标记的说明
81.1—行驶控制系统,2—周围测量装置,3—控制装置,4—行驶路径生成装置,5—行驶控制装置,20—位置信息获取部,21—行驶路径获取部,22—周围信息获取部,23—危险场所检测部,24—信息处理部,25—储存部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1