一种插秧机无人驾驶系统和控制方法与流程
1.本发明属于插秧技术领域,尤其涉及一种插秧机无人驾驶系统和控制方法。
背景技术:
2.目前国内随着人口增长,水稻需求量越来越大,可耕地资源及农业从业人员却再减少;插秧机驾驶及操作负责,需专业人员培训后才能上岗。
技术实现要素:
3.本发明所要解决的技术问题是针对背景技术的不足提供了一种插秧机无人驾驶系统和控制方法,能够实现自动化插秧,节省人力提高秧苗的成活率。
4.本发明为解决上述技术问题采用以下技术方案:一种插秧机无人驾驶系统,包括天线、车载终端、控制器、驱动电机、方向盘电机、角度传感器和推杆电机,其中:天线,用于接收定位信息并将其发送给车载终端;车载终端,与天线连接,用于记录定位信息、计算并设置行驶路线和行驶速度,然后将行驶信号发送给控制器;控制器,与车载终端连接,用于接收车载终端的行驶信号,并控制驱动电机;驱动电机,与控制器连接,驱动电机上通过传动装置连接有行走部件;方向盘电机,与车载终端连接,方向盘电机上连接有转向部件;角度传感器,与控制器连接;推杆电机,与控制器连接,推杆电机上连接有提升油缸。
5.进一步的,所述天线选用gnss天线。
6.进一步的,所述控制器上还连接有电控手柄、秧台上升按钮和秧台下降按钮。
7.进一步的,所述控制器上还连接有显示屏。
8.一种插秧机无人驾驶系统的控制方法,包括如下步骤:步骤1,路线设置,接收定位信息并将其发送给车载终端,然后车载终端接收天线的定位信息并记录下来,同时计算并设置行驶路线和行驶速度;步骤2,插秧机行走,车载终端将设置好的形式路线和形式速度信号发送给控制器,控制器开启驱动电机,通过传动装置驱动行走部件;步骤3,方向纠偏,车载终端开启方向盘电机,驱动方向盘转动,车载终端通过天线的定位信息不断调整行驶方向;步骤4,转向和掉头,车载终端发送减速信号给控制器,控制器控制驱动电机减速,从而让插秧机减速;同时,车载终端发送秧台上升信号给控制器,控制器开启推杆电机,驱动提升油缸上升;然后车载终端驱动方向盘电机实现转向或者掉头,同时角度传感器反馈插秧机转动角度;步骤5,人为介入驾驶,通过向前或者向后推动电控手柄,向控制器发出指令,控制
驱动电机,驱动传动装置和行走部件实现人工驾驶;通过按压秧台上升按钮和秧台下降按钮,向控制器发送指令,控制推杆电机,驱动提升油缸来进行插秧操作;当需要转向时,操纵方向盘实现转向。
9.本发明采用以上技术方案与现有技术相比,具有以下技术效果:本发明可以实现插秧机的自动驾驶、提速减速、转向掉头和自动插秧,从而提高插秧效率,节省人力和时间成本;另外,本发明还可以人工干预操作,从而在自动化系统发生故障时,可以通过人工操作,避免耽误插秧进度。
附图说明
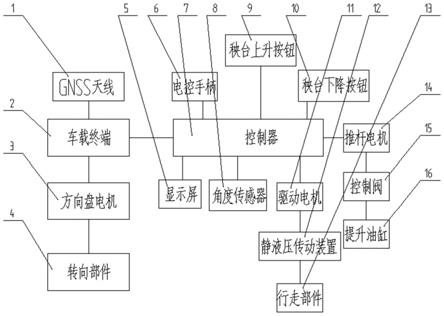
10.图1为本实施例的整体结构示意图。
11.图中,1、gnss天线,2、车载终端,3、方向盘电机,4、转向部件,5、显示屏,6、电控手柄,7、控制器,8、角度传感器,9、秧台上升按钮,10、秧台下降按钮,11、驱动电机,12、静液压传动装置,13、行走部件,14、推杆电机,15、控制阀,16、提升油缸。
具体实施方式
12.下面结合附图对本发明的技术方案做进一步的详细说明:本发明的描述中,需要理解的是,术语“左侧”、“右侧”、“上部”、“下部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,“第一”、“第二”等并不表示零部件的重要程度,因此不能理解为对本发明的限制。本实施例中采用的具体尺寸只是为了举例说明技术方案,并不限制本发明的保护范围。
13.一种插秧机无人驾驶系统,如图1所示,包括天线、车载终端、控制器、驱动电机、方向盘电机、角度传感器和推杆电机,其中:天线,用于接收定位信息并将其发送给车载终端;车载终端,与天线连接,用于记录定位信息、计算并设置行驶路线和行驶速度,然后将行驶信号发送给控制器;控制器,与车载终端连接,用于接收车载终端的行驶信号,并控制驱动电机;驱动电机,与控制器连接,驱动电机上通过传动装置连接有行走部件;方向盘电机,与车载终端连接,方向盘电机上连接有转向部件;角度传感器,与控制器连接;推杆电机,与控制器连接,推杆电机上连接有提升油缸。
14.进一步的,所述天线选用gnss天线。所述控制器上还连接有电控手柄、秧台上升按钮和秧台下降按钮。所述控制器上还连接有显示屏。
15.一种插秧机无人驾驶系统的控制方法,包括如下步骤:步骤1,路线设置,接收定位信息并将其发送给车载终端,然后车载终端接收天线的定位信息并记录下来,同时计算并设置行驶路线和行驶速度;步骤2,插秧机行走,车载终端将设置好的形式路线和形式速度信号发送给控制器,控制器开启驱动电机,通过传动装置驱动行走部件;步骤3,方向纠偏,车载终端开启方向盘电机,驱动方向盘转动,车载终端通过天线
的定位信息不断调整行驶方向;步骤4,转向和掉头,车载终端发送减速信号给控制器,控制器控制驱动电机减速,从而让插秧机减速;同时,车载终端发送秧台上升信号给控制器,控制器开启推杆电机,驱动提升油缸上升;然后车载终端驱动方向盘电机实现转向或者掉头,同时角度传感器反馈插秧机转动角度;步骤5,人为介入驾驶,通过向前或者向后推动电控手柄,向控制器发出指令,控制驱动电机,驱动传动装置和行走部件实现人工驾驶;通过按压秧台上升按钮和秧台下降按钮,向控制器发送指令,控制推杆电机,驱动提升油缸来进行插秧操作;当需要转向时,操纵方向盘实现转向。
16.具体实施说明:所述的gnss天线1用来导航、定位并将信息发送给车载终端2;所述的车载终端2接收gnss天线1的位置信息、驱动方向盘电机3、并和控制器7进行can通讯控制行走及秧台提升;所述的方向盘电机3控制方向盘转动,通过转向部件4实现插秧机的转向;所述的显示屏5能显示插秧机的参数及控制状态;所述的电控手柄6发送行走信号给控制器7;所述的控制器7接收电控手柄6的信号并发送行走信号给驱动电机11;所述的驱动电机11控制静液压传动装置12;所述的静液压传动装置12驱动行走部件13实现行走;所述的角度传感器8能反馈秧台的实际角度;所述的秧台上升按钮9和秧台下降按钮10能操作秧台的上升和下降;所述的推杆电机14能控制控制阀15;所述的控制阀15能控制提升油缸16上升下降。
17.具体的操纵方法如下:1、路线设置过程:所述的gnss天线1发送定位信息给车载终端2,所述的车载终端2用来记录定位信息点、设置及计算行驶路线。
18.2、插秧机行走过程:所述的车载终端2根据设置的行驶路线,发送行驶信号给控制器7,控制器7控制驱动电机11动作,驱动电机11带动静液压传动装置12上的半月板转动,静液压传动装置12就驱动行走部件13执行行走动作。通过车载终端2上设置的行驶速度,可使驱动电机11控制静液压传动装置12上的半月板转动的角度,来实现行走速度的控制。车载终端2通过gnss天线反馈的位置信息计算行驶的速度。
19.3、左、右转向,掉头过程:所述的车载终端2通过gnss天线1实时确认位置信息,当沿着设置的行驶路线行走出现偏差时,车载终端2驱动方向盘电机3控制方向盘转动,车载终端2通过gnss天线1定位的位置信息,不断的调整行驶方向,使插秧机沿设置路线行驶。当设置的路线需要左、右转向和掉头时,车载终端2发送减速信号给控制器7,控制器7控制驱动电机11,驱动电机11减小静液压传动装置12上的半月板转动的角度,插秧机减速;同时车载终端2发送秧台上升信号给控制器7,控制器7控制推杆电机14带动控制阀15工作使提升油缸16实现秧台上升,角度传感器8反馈秧台的实际位置信号给控制器7,秧台上升到位后,控制器7停止输出控制推杆电机14的信号,然后车载终端2驱动方向盘电机3,实现转向或掉头。当转向或掉头结束后,车载终端2发送秧台下降信号给控制器7,控制器7控制推杆电机14带动控制阀15工作使提升油缸16实现秧台下降,角度传感器8反馈秧台的实际位置信号给控制器7,秧台下降到
位后,控制器7停止输出控制推杆电机14的信号,同时控制器控制插秧机加速行走。
20.4、人为介入驾驶:当电控手柄6往前推时,控制器7控制驱动电机11动作,驱动电机11带动静液压传动装置12上的半月板正转,静液压传动装置12就驱动行走部件13执行前进动作。通过操作电控手柄6前推幅度,可使驱动电机11控制静液压传动装置12上的半月板正转的角度,来实现前进速度的控制。
21.当电控手柄6回中位时,控制器7控制驱动电机11动作,驱动电机11带动静液压传动装置12上的半月板回中位,静液压传动装置12停止驱动行走部件13,插秧机停车。
22.当电控手柄6往后推时,控制器7控制驱动电机11动作,驱动电机11带动静液压传动装置12上的半月板反转,静液压传动装置12就驱动行走部件13执行后退动作。通过操作电控手柄6后推幅度,可使驱动电机11控制静液压传动装置12上的半月板反转的角度,来实现后退速度的控制。
23.当按下秧台上升按钮9时,控制器7接收到秧台上升的指令,控制推杆电机14带动控制阀15工作使提升油缸16实现秧台上升,角度传感器8反馈秧台的实际位置信号给控制器7,秧台上升到位后,控制器7停止输出控制推杆电机14的信号。
24.当按下秧台下降按钮10时,控制器7接收到秧台下降的指令,控制推杆电机14带动控制阀15工作使提升油缸16实现秧台下降,角度传感器8反馈秧台的实际位置信号给控制器7,秧台下降到位后,控制器7停止输出控制推杆电机14的信号。当需要转向时,转动方向盘即实现转向。
25.本技术领域技术人员可以理解的是,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
26.以上实施例仅为说明本发明的技术思想,不能以此限定本发明的保护范围,凡是按照本发明提出的技术思想,在技术方案基础上所做的任何改动,均落入本发明保护范围之内。上面对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以再不脱离本发明宗旨的前提下做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1