一种减少光整带钢头部未光整的控制方法和控制系统与流程
1.本发明属于光整机技术领域,尤其涉及一种减少光整带钢头部未光整的控制方法和控制系统。
背景技术:
2.光整机是镀锌生产线的重要组成部分,起到控制板形、调节锌花尺寸、转印粗糙度等功能,并且是连接退火炉、锌锅与出口段的桥梁,一旦光整机出现问题,直接影响镀锌生产线的正常运行。某冷轧厂光整机为四辊光整机,由于生产的订单较多,某些订单产品存在不需光整的情况,由不光整订单产品切换到光整订单产品时,操作人员一般需要闭合光整机机架对光整订单产品进行光整。
3.但是,光整机的机架闭合需要一定的时间,而现有技术中靠人工无法控制当光整订单产品的焊缝到达光整机时,光整机刚好闭合,所以经常出现当操作人员启动光整机到机架闭合的这段时间,光整订单产品已经通过光整机一定的距离,导致出现带钢头部有不光整的现象,不能交付用户使用,损失较大,严重影响经济效益。
技术实现要素:
4.针对上述现有技术的不足,本发明提供一种减少光整带钢头部未光整的控制方法和控制系统,以解决现有技术中带钢头部有不光整的现象,不能交付用户使用,损失较大,严重影响经济效益的技术问题。
5.本发明通过以下技术方案来实现上述目的:
6.一种减少光整带钢头部未光整的控制方法,所述控制方法应用于不光整带钢与光整带钢之间的焊缝达到光整机之前的阶段,具体包括:
7.获取光整机机架的闭合时间t1;
8.确定焊缝检测点与所述光整机之间的距离,所述焊缝检测点可检测到所述不光整带钢与所述光整带钢之间的焊缝,所述焊缝从所述焊缝检测点移动至所述光整机的时间为t2,t2>t1;
9.所述焊缝经过所述焊缝检测点之后移动至所述光整机的时间为t3,当t3=t1时,开始操作光整机机架闭合;
10.在所述焊缝达到光整机机架时,所述光整机机架闭合完毕。
11.进一步地,所述光整机机架的闭合时间t1为45
‑
90秒。
12.进一步地,所述焊缝从所述焊缝检测点移动至所述光整机的时间为t2,具体包括:
13.获取整体带钢的实际运行速度,所述整体带钢匀速运行;
14.根据所述焊缝检测点与所述光整机之间的距离以及所述整体带钢的实际运行速度计算所述焊缝从所述焊缝检测点移动至所述光整机机架的时间t2。
15.进一步地,所述计算所述焊缝从所述焊缝检测点到达所述光整机的时间t2由以下公式得到:
16.t2=s/v
17.其中,
18.s(米)为所述焊缝检测点与所述光整机之间的距离;
19.v(米/秒)为所述整体带钢的实际运行速度。
20.进一步地,所述焊缝检测点与所述光整机之间的距离为210
‑
230米,所述整体带钢的实际运行速度为1.8
‑
2.2米/秒。
21.进一步地,所述焊缝经过所述焊缝检测点之后移动至所述光整机机架的时间为t3,具体包括:
22.获取所述焊缝经过所述焊缝检测点之后与所述光整机之间的距离;
23.根据所述焊缝经过所述焊缝检测点之后与所述光整机之间的距离以及所述整体带钢的实际运行速度计算所述焊缝经过所述焊缝检测点之后移动至所述光整机机架的时间t3。
24.进一步地,所述焊缝经过所述焊缝检测点之后移动至所述光整机的时间为t3由以下公式得到:
25.t3=δs/v
26.其中,
27.δs(米)为所述焊缝经过所述焊缝检测点后与光整机之间的距离;
28.v(米/秒)为所述整体带钢的实际运行速度。
29.本发明还提供了一种减少需光整带钢头部不光整的控制系统,所述控制系统应用于不光整带钢切换为光整带钢的焊缝达到光整机之前的阶段,所述控制系统包括:
30.获取模块:用于获取光整机机架的闭合时间t1,所述焊缝检测点与所述光整机之间的距离,所述焊缝经过所述焊缝检测点后与所述光整机之间的距离以及所述整体带钢的实际运行速度;
31.检测模块:用于在所述焊缝检测点检测所述不光整带钢与光整带钢之间的焊缝;
32.计算模块:用于计算所述焊缝从所述焊缝检测点移动至所述光整机的时间t2以及所述焊缝经过所述焊缝检测点之后移动至所述光整机的时间t3;
33.执行模块:用于当t3=t1时,启动光整机机架。
34.本发明还提供了一种电子设备,包括存储器、处理器及存储在存储器上运行的计算机程序,所述处理器执行所述程序时实现以上任一项所述方法的步骤。
35.本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现以上任一项所述方法的步骤。
36.本发明的有益效果是:
37.本发明所提供的一种减少光整带钢头部不光整的控制方法,当经过光整机的带钢即将从不光整带钢切换到光整带钢,不光整带钢与光整带钢之间的焊缝还未到达光整机时,获取光整机机架的闭合时间t1,确定焊缝检测点与光整机之间的距离,焊缝从焊缝检测点移动至光整机机架的时间为t2大于t1,随着焊缝继续移动,焊缝移动至光整机的距离和时间均持续缩短,当焊缝经过焊缝检测点之后移动至光整机的时间t3等于t1时,开始操作光整机机架闭合,这样一来,不光整带钢与光整带钢之间的焊缝到达光整机时,光整机机架刚好完成闭合并随之对光整带钢进行光整,实现全过程自动化,避免了人工操作的不准确性,减
少了光整带钢头部不光整的现象,提高了生产效率。
附图说明
38.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
39.图1为不光整带钢经过光整机的示意图;
40.图2为不光整带钢与光整带钢之间的焊缝经过光整机的示意图;
41.图3为本发明实施例的一种减少光整带钢头部不光整的控制方法的流程示意图。
具体实施方式
42.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
43.图1为不光整带钢经过光整机的示意图,图2为不光整带钢与光整带钢之间的焊缝经过光整机的示意图,结合图1及图2,当不光整带钢2经过光整机1时,光整机1机架为打开状态,当不光整带钢2的后一卷为光整带钢3时,光整机1机架需在不光整带钢2与光整带钢3之间的焊缝4到达光整机1时闭合,以对光整带钢3进行光整,但光整机1机架闭合需要一定时间,现有技术中经常出现光整机1机架闭合完成时,光整带钢3已经通过光整机1一段距离,导致出现光整带钢3头部不光整现象。
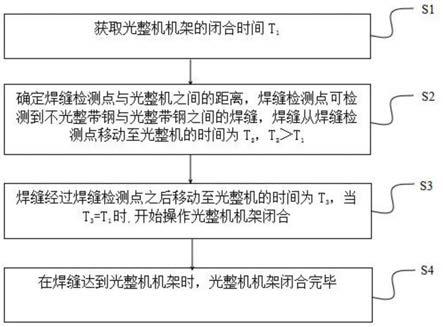
44.基于此,申请人进行改进,提供了一种减少光整带钢头部不光整的控制方法,该控制方法应用于不光整带钢与光整带钢之间的焊缝达到光整机之前的阶段,图3为本发明实施例的一种减少光整带钢头部不光整的控制方法的流程示意图,结合图3,该控制方法包括:
45.s1:获取光整机1机架的闭合时间t1;
46.s2:确定焊缝检测点与光整机1之间的距离,焊缝检测点可检测到不光整带钢2与光整带钢3之间的焊缝,焊缝4从焊缝检测点移动至光整机1的时间为t2,t2>t1;
47.s3:焊缝4经过焊缝检测点之后移动至光整机1的时间为t3,当t3=t1时,开始操作光整机1机架闭合;
48.s4:在焊缝4达到光整机1机架时,光整机1机架闭合完毕。
49.本发明实施例所提供的一种减少光整带钢头部不光整的控制方法,当经过光整机1的带钢即将从不光整带钢2切换到光整带钢3,不光整带钢2与光整带钢3之间的焊缝4还未到达光整机1时,获取光整机1机架的闭合时间t1,确定焊缝检测点4与光整机1之间的距离,焊缝4从焊缝检测点移动至光整机1机架的时间t2大于t1,随着焊缝4继续移动,焊缝4移动至光整机1的距离和时间均持续缩短,当焊缝4经过焊缝检测点之后移动至光整机1的时间t3等于t1时,开始操作光整机1机架闭合,这样一来,不光整带钢2与光整带钢3之间的焊缝4到达光整机1时,光整机1机架刚好完成闭合并随之对光整带钢3进行光整,减少了光整带钢3
头部不光整的现象,提高了生产效率。
50.本实施例的方案是通过在逻辑编程控制器plc中编程实现的,为了方便现场作业人员使用,在光整机控制系统的人机交互页面上增设投用本方法的功能按钮,作业人员可根据现场生产实际情况判断是否使用此功能,例如当不存在不光整带钢与光整带钢的切换时,或者作业区现场出现异常情况时,可以及时停止使用此功能。
51.进一步地,在s2中,具体包括:
52.获取整体带钢的实际运行速度,整体带钢匀速运行;
53.根据焊缝检测点与光整机1之间的距离以及整体带钢的实际运行速度计算焊缝4从焊缝检测点移动至光整机1机架的时间t2。
54.具体地,焊缝4从焊缝检测点到达光整机1的时间t2由以下公式得到:
55.t2=s/v
56.其中,
57.s(米)为焊缝检测点与光整机1之间的距离;
58.v(米/秒)为整体带钢的实际运行速度。
59.在s1中,必须保证当焊缝4从焊缝检测点到达光整机1的时间t2大于光整机1机架闭合的时间t1,因此,本实施例中对相关参数进行了限制:光整机1机架的闭合时间t1为45
‑
90秒,焊缝检测点与光整机1之间的距离为210
‑
230米,整体带钢的实际运行速度为1.8
‑
2.2米/秒,根据本实施例中t2的计算公式:t2=s/v,可以得出,焊缝4从焊缝检测点到达光整机1的时间t2的范围是95
‑
128秒,大于光整机1机架的闭合时间t1。
60.进一步地,在s3中,具体包括:
61.获取焊缝4经过焊缝检测点之后与光整机1之间的距离;
62.根据焊缝4经过焊缝检测点之后与光整机1之间的距离以及整体带钢的实际运行速度计算焊缝4经过焊缝检测点之后移动至光整机1的时间t3。
63.具体地,焊缝经过焊缝检测点之后移动至光整机机架的时间t3由以下公式得到:
64.t3=δs/v
65.其中,
66.δs(米)为焊缝4经过焊缝检测点后与光整机1之间的距离;
67.v(米/秒)为整体带钢的实际运行速度。
68.基于前述实施例相同的发明构思,在一些可选的实施例中,提供了一种减少需光整带钢头部不光整的控制系统,控制系统应用于不光整带钢2与光整带钢3之间的焊缝4达到光整机1之前的阶段,具体包括:
69.获取模块:用于获取光整机1机架的闭合时间t1,焊缝检测点与光整机1之间的距离,焊缝4经过焊缝检测点后与光整机1之间的距离以及整体带钢的实际运行速度;
70.检测模块:用于在焊缝检测点检测不光整带钢2与光整带钢3之间的焊缝4;
71.计算模块:用于计算焊缝4从焊缝检测点移动至光整机1的时间t2以及焊缝4经过焊缝检测点之后移动至光整机1的时间t3;
72.执行模块:用于当t3=t1时,启动光整机1机架。
73.基于前述实施例相同的发明构思,在一些可选的实施例中,提供了一种电子设备,包括存储器、处理器及存储在存储器上运行的计算机程序,处理器执行程序时实现上述实
施例中任一项方法的步骤。
74.基于前述实施例相同的发明构思,在一些可选的实施例中,提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述实施例中任一项所述方法的步骤。
75.通过本发明的一个或者多个实施例,本发明具有以下有益效果或者优点:
76.本发明公开了一种减少光整带钢头部不光整的控制方法,当经过光整机1的带钢即将从不光整带钢2切换到光整带钢3,不光整带钢2与光整带钢3之间的焊缝4还未到达光整机1时,获取光整机机架的闭合时间t1,确定焊缝检测点与光整机之间的距离,焊缝从焊缝检测点移动至光整机机架的时间为t2大于t1,随着焊缝继续移动,焊缝移动至光整机的距离和时间均持续缩短,当焊缝经过焊缝检测点之后移动至光整机的时间t3等于t1时,开始操作光整机机架闭合,这样一来,不光整带钢2与光整带钢3之间的焊缝4到达光整机1时,光整机1机架刚好完成闭合并随之对光整带钢进行光整,实现全过程自动化,避免了人工操作的不准确性,减少了光整带钢头部不光整的现象,提高了生产效率。
77.以上所举实施例为本发明的较佳实施方式,仅用来方便说明本发明,并非对本发明作任何形式下的限制,任何所述技术领域中具有通常知识者,若在不脱离本发明所提技术特征的范围内,利用本发明所揭示技术内容所作出局部更动或修饰的等效实施例,并且未脱离本发明的技术特征内容,均仍属于本发明技术特征的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1