一种具有未知信息的多智能车系统分布式自触发控制方法与流程
1.本发明属于多智能体系统领域,涉及一种具有未知信息的多智能车系统分布式自触发控制方法。
背景技术:
2.随着信息通信技术和嵌入式技术的发展,多智能体系统的概念和应用也逐渐出现在人们的视野中,其相关研究成果被广泛应用于车辆交通管理、无人驾驶等领域。因此以节约智能体之间沟通成本为目的,如何设计控制协议和应用高效合理的控制方法逐渐成为研究热点。下面以多智能车(差分驱动的轮式移动智能车)系统为例,介绍多智能车系统应用事件触发控制的方法:
3.为了分析差分驱动的轮式移动智能车的完整动力学方程,引入了“手”位置的概念代替整个智能车的中心位置,该点位于沿着轮轴垂直并在中心点与车轮轴线相交的直线上距离轮轴h的点的位置,如图1所示。该多智能车系统的完整动力学方程如下:
[0004][0005]
其中i表示第i个智能车,x
i
(t)、v
i
(t)、分别表示智能车i的位置、速度、位置的导数、加速度和控制输入,为智能车i第k次的事件触发时刻,为智能车i第k+1次的事件触发时刻,已有控制器的控制输入u
i
(t)形式为:
[0006][0007]
其中k1和k2表示系统的耦合强度,为智能车i的邻居j的最新事件触发时刻,g=[a
ij
]
n
×
n
表示多智能车系统通信拓扑图的邻接矩阵,若智能车i与邻居智能车j能够进行信息交互,则a
ij
=1;否则,a
ij
=0。
[0008]
上述控制器的控制输入u
i
(t)基于如下事件触发条件函数f
i
(t)更新:
[0009][0010]
其中e
i
(t)=(e
ix
(t),e
iv
(t))
t
,||e
i
(t)||,分别表示智能车i最新触发时刻与当前时刻的位置误差、速度误差、总误差、总误差的范数以及时刻的控制输入的范数,γ
i
∈(0,1),当智能车满足(3)式的触发条件,执行事件触发任务,智能车i与其邻居智能车j进行信息的交互以及控制输入的更新。
[0011]
对上述系统进行分析,其中还存在如下两个问题:
[0012]
a)上述系统中每个智能车是通过与其邻车交互位置与速度信息使整个系统达到状态同步,但当系统(1)中智能车的速度信息不容易测量或不可测量时,控制器的控制输入
(2)以及事件触发条件(3)不再适用。
[0013]
b)基于事件触发控制的多智能车系统,虽然减少了控制输入的更新频率,但是需要实时对触发条件进行检测和判断,这违背了减少资源使用的设计初衷。
[0014]
针对上述问题a),已有方法需要设计观测器或滤波器对速度信息进行估算,此方法会增加系统维数导致闭环动态系统的分析更为复杂,本发明引入带有时滞的位置信息补偿速度信息,无需设计观测器或滤波器。
[0015]
针对上述问题b),本发明在事件触发机制的基础之上,应用自触发控制的方法,可使智能车i的控制输入的更新时刻由事先确定,不需要实时对触发条件进行检测和判断,从而减少通讯代价。
技术实现要素:
[0016]
本发明针对上述存在的问题,提供了一种具有未知信息的多智能车系统分布式自触发控制方法,其中多智能车系统包含n个智能车,且n≥2。
[0017]
本发明解决技术问题所采取的技术方案包括如下步骤:
[0018]
步骤a:建立多智能车系统的完整动力学方程,各个智能车的通讯拓扑关系用一个无向连通图表示,每个智能车之间的联系用laplacian矩阵描述;
[0019]
步骤b:设计控制器,使控制器的控制输入仅交互智能车的位置信息而不再交互智能车的速度信息;
[0020]
步骤c:针对智能车i设计合适的自触发条件函数f
i
(t);
[0021]
步骤d:根据控制要求,证明系统的稳定性并求解使得多智能车系统稳定的耦合强度以及时滞;
[0022]
步骤e:证明智能车控制器的控制输入更新时刻可由事先确定;
[0023]
步骤f:基于步骤c中设计的自触发条件函数f
i
(t),在保证多智能车系统一致性稳定的基础之上确定自触发不会产生zeno现象;
[0024]
步骤g:将所设计的控制器的控制输入以及自触发条件函数通过编程写入智能车系统中的每一辆智能车,通过建立通信拓扑连通图实现各个智能车的分布式信息交互,最终实现所有智能车能达到状态一致性。
[0025]
本发明的有益效果:本发明中的多智能车系统不再交互速度信息,而是仅通过位置信息交互使系统达到状态同步,应用自触发控制算法,使系统不需要实时对触发条件进行检测和判断,从而减少通讯代价。
附图说明
[0026]
图1为差分驱动的轮式移动智能车“手”位置;
[0027]
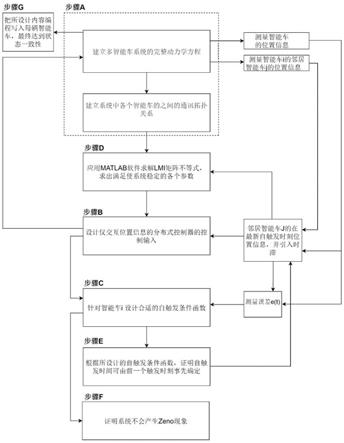
图2为本发明方法流程图。
具体实施方式
[0028]
本发明要解决基于事件触发控制的多智能车系统中智能车速度信息不容易测量或不可测量,和实时对触发条件进行检测和判断造成资源浪费这两个问题。与传统控制协
议和事件触发控制方法相比,主要做出以下两方面的改进:1)重新设计系统的控制协议,使智能车之间仅交互位置信息;2)在事件触发机制的基础之上,应用自触发控制的方法。
[0029]
以下结合附图2对本发明作进一步说明,本发明包括如下步骤:
[0030]
步骤a:建立多智能车系统的完整动力学方程,各个智能车的通讯拓扑关系可以用一个无向连通图表示,每个智能车之间的联系用laplacian矩阵描述。
[0031]
步骤b:针对问题a),设计相对应的控制器,使控制器的控制输入仅交互智能车的位置信息而不再交互智能车的速度信息。
[0032]
步骤c:针对智能车i设计合适的自触发条件函数f
i
(t)。
[0033]
步骤d:根据控制要求,证明系统的稳定性并求解使得多智能车系统稳定的耦合强度以及时滞。
[0034]
步骤e:针对问题b),基于上述步骤,证明智能车控制器的控制输入更新时刻可由事先确定。
[0035]
步骤f:基于步骤c中设计的自触发条件函数f
i
(t),在保证多智能车系统一致性稳定的基础之上确定自触发不会产生zeno现象。
[0036]
步骤g:将上述过程中所设计的控制器的控制输入以及自触发条件函数通过编程写入智能车系统中的每一辆智能车,通过建立通信拓扑连通图实现各个智能车的分布式信息交互,最终实现所有智能车能达到状态一致性。
[0037]
其中根据步骤a的要求,多智能车系统的完整动力学方程与式(1)一致。系统中n个智能车的通讯拓扑关系可以用一个无向连通图表示,其laplacian矩阵定义为:
[0038]
l
ij
=
‑
a
ij i≠j满足
[0039]
其中根据步骤b的要求,设计仅交互位置信息的控制器的控制输入:
[0040][0041]
其中0<β<α为系统的耦合强度,τ为引入的时滞,为任意连续两次触发时刻的时间间隔,设初始触发时刻与控制输入(2)的第二项相比,上述控制输入不需要直接交互速度信息,而是通过引入具有时滞的位置信息间接补偿速度信息。
[0042]
其中根据步骤c的要求,设计合适的自触发条件函数f
i
(t),其具体形式为:
[0043][0044]
其中:γ
i1
、γ
i2
∈(0,1)可调节系统自触发条件的灵敏度,sign(
·
)为符号函数,当f
i
(t)≥0达到自触发条件。
[0045]
其中根据步骤d的要求,求解使得该多智能车系统稳定的具体参数α,β,τ,p,q
[0046]
(1)式和(4)式可整理为如下形式:
[0047][0048]
其中:
[0049][0050]
y=(x
t
(t),v
t
(t))
t
[0051][0052]
i
n
为n维单位矩阵,i
nn
为nn维单位矩阵,0
nn
为nn维零矩阵,为kronecker积,其定义为:若
[0053][0054]
进一步构造如下形式的lyapunov
‑
krasovskii方程:
[0055][0056]
其中:τ>0,且p=p
t
>0,q=q
t
>0为正定对称矩阵。
[0057]
对(7)式求导可得:
[0058][0059]
对上式进一步化简可得到关于α,β,τ,p,q的lmi不等式m(α,β,τ,p,q)<0,对于任意给定的对称正定矩阵q通过matalb软件求解lmi不等式可得到满足的具体参数,根据李雅普诺夫定理,系统稳定,证毕。
[0060]
其中根据步骤e的要求,证明智能车控制器的控制输入更新时刻可由事先确定。
[0061]
求解任意连续两次控制器更新时间间隔,定义位置与速度误差:
[0062][0063]
其中:表示根据位置信息间接计算出的速度信息。
[0064]
进一步计算可得:
[0065][0066]
为了方便计算,先将(5)式移项平方再移项可得如下等式
[0067]
[0068]
再将(10)式代入可得:
[0069][0070]
需讨论如下情况:
[0071]
当时,代入(12)式可得:
[0072]
‑
(γ
i2
)2<0
[0073]
当t
→
∞,时,已知系统稳定性证明成立,代入(12)可得:
[0074][0075]
由介值定理可得存在使(12)式等号成立。
[0076]
当时,代入(12)式可得:
[0077][0078]
当t
→
∞,时,已知步骤b系统稳定性证明成立,代入(12)式得:
[0079][0080]
由介值定理可得存在使(11)式成立。
[0081]
综上所述,可得即智能车控制器更新时刻可由事先确定。
[0082]
其中根据步骤f的要求,在上述证明的基础之上,排除zeno触发行为。
[0083]
已知系统稳定性证明成立,存在正常量ρ
v
、ρ
u
使得如下不等式成立:
[0084][0085][0086]
根据||e
ix
(t)+e
iv
(t)||≤||e
ix
(t)||+||e
iv
(t)||可得:
[0087][0088]
代入到自触发条件(5)可得:
[0089][0090]
需讨论如下情况:
[0091]
当时,代入(13)式可得:
[0092][0093]
当时,代入(13)式可得:
[0094][0095]
综上所述,任意连续两次更新时间间隔大于零,即不会出现zeno触发行为。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1