用于控制在工地上运行的自主车辆的方法与流程
1.本发明涉及一种用于控制工地中的自主车辆的方法。本发明适用于自主车辆,例如工业建筑机械领域中的作业机械,特别是运输车和挖掘机。尽管将针对运输车和挖掘机来描述本发明,但本发明不限于这些特定的作业机械,而是也可用在其它建筑设备或其它车辆中,例如轮式装载机、卡车等。
背景技术:
2.关于例如在工地(例如,在建筑场所或采石场)上运输物料,经常使用运输车、挖掘机、轮式装载机、卡车或翻斗车形式的作业机械。在其最简单的构造中,作业机械被布置成在工地的装载位所(loading location)或装载位置(loading position)处将物料接收在布置于车辆上的车斗等中,并且行驶或以其它方式移动到该工地的卸载位置或卸载位所,在该卸载位置或卸载位所,作业机械卸载所运载的物料。在卸载位所/卸载位置处,物料被处理(taken care of)。例如,在采石场处,运输到卸载位所/卸载位置的大型石材要经过破碎机处理。
3.为了降低成本和环境影响,希望高效利用作业机械的能量。此外,工地的自主运行或至少在工地处运行的作业机器的自主运行可以有助于工地处的高效作业,并且可以进一步降低不必要的成本。然而,工地可能相对复杂,具有用于选择自主作业机械的作业序列的轨迹的多个选项。例如,可以通过改变装载位所/位置与卸载位所/位置之间的路径和/或通过改变行进路径上的速度来改变轨迹。因而,手动找出最佳轨迹并对自主作业机械进行编程以使其相应地运行是非常耗时的。此外,随着工地的发展,最佳轨迹的选择可能会随着时间而改变,从而使过程进一步复杂化。
4.因而,行业内需要对工地上的自主车辆的改进的控制。
技术实现要素:
5.本发明的目的是一种用于控制工地中的自主车辆的方法,该方法对测试轨迹和预定轨迹上的能量用量进行比较。
6.根据本发明的第一方面,提供了一种用于控制工地中的自主车辆的方法。该方法包括以下步骤:
7.‑
接收自主车辆的作业序列的预定轨迹,该预定轨迹至少包括设定路径和设定速度,
8.‑
将预定义的变化添加到所述预定轨迹以形成测试轨迹,该变化至少包括所述设定路径或所述设定速度的变化,
9.‑
对所述测试轨迹和所述预定轨迹上的能量用量进行比较,
10.‑
确定所比较的能量用量是否达到预设标准,
11.‑
响应于确定所比较的能量用量达到预设标准,将所述测试轨迹设定为自主车辆的新的设定轨迹。
12.由此,可以改善自主车辆的能量用量。此外,通过确定所比较的能量用量是否达到预设标准,能够有效地避免自主车辆的次优化(sub
‑
optimization)。例如,如果所比较的能量用量本身表明所述测试轨迹优于所述预定轨迹,但所述测试轨迹的作业序列的消耗时间(elapsed time)大大超过所述预定轨迹的作业序列的消耗时间,则应执行将能量用量方面的收益与作业序列的消耗时间方面的损失进行比较的动作,以避免所述设定轨迹的非期望的改变。这是通过所比较的能量用量达到预设标准来实现的。
13.根据至少一个示例实施例,所述预定轨迹是预设的,表明预先知道自主车辆的作业序列。因而,所述预定轨迹通常是这样的设定轨迹:其至少包括在执行本发明的方法之前的作业序列的所述设定路径和设定速度。
14.根据至少一个示例实施例,所述预定义的变化至少是所述轨迹的所述设定路径或设定速度的已知特性的变化。所述预定义的变化可以例如是所述设定路径或设定速度的预定义改变,例如所述设定路径的至少一部分的预期改变,或沿着相关路径的至少一部分的所述设定速度的预期改变。因而,所述预定义的变化是这样一种变化或改变:其是预期的改变或已知特性,其不同于例如由外部因素(例如沿着自主车辆的路径遇到并可能记录未知或不熟悉的障碍物)引起的变化或改变。可以通过模拟(例如通过使用已知的设定路径并使用地形/地图信息在所述设定路径中添加变化)来确定所述预定义的变化。
15.根据至少一个示例实施例,所述测试轨迹包括除了所述预定义的变化之外的、所述预定轨迹的设定路径和设定速度(即,路径设置和速度设置)。换句话说,所述测试轨迹包括测试路径和测试速度,其中,该测试路径和测试速度中的至少一个不同于所述预定轨迹的设定路径和设定速度。
16.根据至少一个示例实施例,通常已知对应于所述预定轨迹的作业序列的能量用量,或者在执行这样的作业序列期间确定/估计所述能量用量。对应地,可以在执行这样的作业序列期间确定/估计与所述测试轨迹相对应的作业序列的能量用量。然而,根据至少一个示例实施例,模拟了所述预定轨迹和测试轨迹中的至少一个轨迹的作业序列的能量用量。例如,可以通过使用与所述预定轨迹有关的已知的能量用量以及与所述预定义的变化有关的所估计的能量用量(例如通过使用地形/地图信息或其它地形信息)来估计所述测试轨迹的能量用量。
17.应当理解,如果所比较的能量用量未达到所述预设标准,则通常将所述预定轨迹保持为设定轨迹。
18.根据至少一个示例实施例,所述预设标准至少是所述测试轨迹具有比所述预定轨迹低的能量用量。
19.由此,简化了是否将所述测试轨迹设定为新的设定轨迹的判定。因而,根据这样的实施例,该方法将不会导致与所述预定轨迹相比具有更高能量用量的、新的设定轨迹。
20.根据至少一个示例实施例,所述预设标准至少是所比较的能量用量与以下项之一相关:所述作业序列的消耗时间、所述设定路径的消耗时间、最小平均速度、最大允许振动、所期望的电池用量。
21.由此,对于是否将所述测试轨迹设定为新的设定轨迹的判定可以基于作业序列的期望特性或设定极限。例如,所述作业序列或设定路径的最大消耗时间可以用于不将新的设定轨迹改变为所述测试轨迹,即使所述测试轨迹的能量用量与所述预定轨迹相比得到了
改善也是如此。根据另一示例实施例,基于能量用量方面的收益与所述作业序列或设定路径的消耗时间方面的损失的关系,将所述测试轨迹设定为新的设定轨迹。另外或可替选地,可以在能量用量和最小平均速度、最大允许振动和所期望的电池用量之间建立对应关系。
22.根据至少一个示例实施例,该方法包括:执行多个测试轨迹;并且在所述预定轨迹与每个测试轨迹之间比较能量用量;之后,以最有前途的测试轨迹前进。最有前途的测试轨迹例如与最低能耗有关。由此,可以避免局部最小值。
23.根据至少一个示例实施例,所述预定义的变化包括噪声、或者所述设定路径和/或设定速度的阶跃改变。
24.这样的噪声或阶跃改变有利地用作预定义的变化,因为可以容易地比较所得到的测试轨迹并基于该变化来评估所获得的测试轨迹。例如,如果所述预定义的变化是在所述设定路径的特定部分处的设定速度的阶跃改变,并且所述测试轨迹的所得到的能量用量增加了,则可以执行对应的但相反的阶跃改变,以评估所述测试轨迹的所得到的能量用量是否会降低。
25.根据至少一个示例实施例,所述噪声包括已知大小和特性的随机信号,所述随机信号是关于允许其变化多少而设定的。例如,所述噪声是有色噪声或具有选定带宽的伪随机信号。
26.根据至少一个示例实施例,所述自主车辆还包括辅助设备,该辅助设备被构造成执行诸如挖掘或装载之类的作业,并且其中,所述预定轨迹包括该自主车辆的执行作业的动作。
27.由此,任何辅助设备的能量用量都可以被包括在所比较的能量用量中。
28.根据至少一个示例实施例,所述作业序列的轨迹对应于自主车辆的辅助设备(例如,作为例如挖掘机的动臂和铲斗的工具,或者钻机的钻孔工具)的轨迹,和/或所述作业序列的轨迹对应于自主车辆本身的轨迹,即,自主车辆沿着其行进的路径。这两种类型的轨迹都与能量用量相关。对于自主车辆的辅助设备的轨迹,在辅助设备的相关动作期间使用能量,并且随着辅助设备移动而使用能量。该辅助设备例如可以从起始位置移动到目标位置,或者移动到其中辅助设备的工具执行相关动作的动作位置,并可能进一步移动到最终位置(该最终位置例如可以与起始位置相同)。辅助设备的这种移动和执行相关动作是自主车辆的作业序列的示例。对于自主车辆本身的轨迹,使用能量来推进自主车辆,并且能量另外用于在自主车辆的推进期间执行的任何动作,例如在自主车辆为翻斗车或运输车的情况下的装载、倾卸和/或运送物料。自主车辆例如可以从起始位所移动到目标位所,或者移动到其中辅助设备的工具执行所述相关动作的动作位所,并且可能进一步移动到最终位所(该最终位所例如可以与起始位所相同)。自主车辆的这种移动以及可能在移动期间执行的任何动作是自主车辆的作业序列的另一示例。
29.因而,并且根据至少一个示例实施例,轨迹通常分别包括辅助设备和/或自主车辆沿着其移动的路径、以及辅助设备和/或自主车辆沿着该路径的速度。
30.根据至少一个示例实施例,所述预定义的变化至少是执行作业的所述动作的变化,或者是执行作业的所述动作的路径位置的变化。
31.由此,与所述预设标准对应地,可以改进与执行作业有关的能量用量。
32.根据至少一个示例实施例,所述自主车辆被构造成用于运送物料,并且其中,所述
预定义的变化至少包括所述设定路径随自主车辆的物料运送距离的变化。
33.由此,与所述预设标准对应地,可以改进与所述设定路径的要进行物料运送的部分有关的能量用量。例如,所述动作位所可以是自主车辆接收物料的位所,而目标位所可以是物料被倾卸的位所。因而,所述预定义的变化可以是在所述动作位所和所述目标位所之间的设定路径的变化。
34.根据至少一个示例实施例,所述设定路径对应于自主车辆从起始位所到目标位所的行进距离,和/或对应于自主车辆的辅助设备从起始位置到目标位置的行进距离。
35.由此,可以容易地定义所述设定路径,并且例如,关于作业序列的能量用量和消耗时间或其它期望参数,在所确定的轨迹和所述测试轨迹之间进行比较。
36.根据至少一个示例实施例,所述预定轨迹包括设定路径,该设定路径具有起始位所和目标位所和/或起始位置和目标位置,并且其中,所述测试轨迹包括设定路径,该设定路径分别具有相同的起始位所和目标位所和/或相同的起始位置和目标位置。
37.因而,所述预定义的变化至少是在起始位所/位置和目标位所/位置之间某处的设定路径的变化,或者是设定速度的变化。由此,可以对执行相同或类似任务的自主车辆,或者至少是从相同位所或位置开始并在相同位所或位置结束的自主车辆执行所比较的能量用量。因而,所述预定义的变化被界定或限制,以免以非期望的方式影响自主车辆的移动。
38.根据至少一个示例实施例,所述预定义的变化包括在起始位所和目标位所之间或在起始位置和目标位置之间的预定义路径部分的设定路径的变化。
39.这样的预定义路径部分可以对应于所述设定路径中的具有已知的高能量用量或具有已知的麻烦地形的部分。通过将所述预定义的变化关联于这样的预定义路径部分,可以有针对性地执行各种测试轨迹,以改进该具体路径部分处的性能。
40.根据至少一个示例实施例,所述预定轨迹的设定路径是第一路径,并且所述测试轨迹的设定路径是第二路径,其中,该第二路径不同于第一路径。
41.由此,可以针对两个不同的路径或路线,对自主车辆执行所比较的能量用量。第二路径可以仅部分地与上文所述的第一路径不同,或者第二路径可以与第一路径完全不同。根据至少一个示例实施例,第一路径和第二路径共享相同的起始位所/位置和/或相同的目标位所/位置,除此之外都不相同。换句话说,第一路径和第二路径仅在起始位所/位置和/或目标位所/位置处重叠。根据至少一个示例实施例,第一路径不与第二路径重叠。
42.根据至少一个示例实施例,第二路径短于第一路径。
43.较短的路径通常使得能量用量较低和/或所述作业序列或设定路径的消耗时间较短。
44.根据至少一个示例实施例,所述预定义的变化包括基于更有利的道路条件(例如更有利的地形)的设定路径的变化。
45.根据至少一个示例实施例,该自主车辆包括存储器,并且其中,该存储器被配置成将与具有行进速度的自主车辆的行进路径有关的历史数据存储为预定轨迹。
46.即,所述预定轨迹是历史上执行的轨迹,其中,设定路径是行进路径,设定速度是行进速度。此外,历史数据可以包括所述预定轨迹的历史能量用量。
47.根据至少一个示例实施例,该自主车辆包括马达和被配置成向马达供应能量的电池,并且其中,该方法还包括:针对所述预定轨迹和所述测试轨迹,测量该电池的能量用量。
48.由此,可以容易地定义能量用量并在所确定的轨迹与所述测试轨迹之间比较能量用量。
49.另外或可替选地,该电池还向自主车辆的任何辅助设备供电,优选通过功率输出装置(power take off arrangement)。根据至少一个示例实施例,该电池包括多个电池单元,其中,至少一个电池被配置成向所述马达供电,并且至少一个电池被配置成向所述辅助设备供电。
50.根据至少一个示例实施例,该自主车辆是作业机械。
51.该作业机械可以例如是自主翻斗车、运输车或挖掘机。该作业机械可以是钻机或破碎机。
52.根据至少一个示例实施例,所述预定轨迹包括上坡路径部分,并且所述预定义的变化包括用于避开该上坡路径部分的所述设定路径的变化,或者包括在该上坡路径部分之前或期间的所述设定速度的变化。
53.由此,能够以不同的方式针对自主车辆执行所比较的能量用量,以管理该上坡路径部分。上坡是与更大的能量用量相关联的典型路径部分。例如,自主车辆的设定速度可以被设定成在上坡路径部分之前更高,从而在带有更高惯性的情况下进入上坡路径部分。
54.根据至少一个示例实施例,所述预定义的变化由安全参数和车辆极限界定。
55.由此,包括所述预定义的变化不会有导致自主车辆在这些安全参数或车辆极限之外运行的风险。
56.根据本发明的第二方面,提供了一种计算机程序。该计算机程序包括程序代码组件,该程序代码组件用于当所述程序在计算机上运行时执行本发明的第一方面所述的步骤。
57.根据本发明的第三方面,提供了一种携载计算机程序的计算机可读介质。该计算机可读介质携载包括程序代码组件的计算机程序,该所述程序代码组件用于当所述程序在计算机上运行时执行本发明的第一方面所述的步骤。
58.本发明的第二方面和第三方面的效果和特征在很大程度上类似于上文关于本发明的第一方面所述的那些效果和特征。
59.根据本发明的第四方面,提供了一种自主车辆,例如自主作业机械。该自主车辆包括根据本发明的第二方面的计算机程序,或者包括根据本发明的第三方面的、携载计算机程序的计算机可读介质。
60.在以下描述中公开了本发明的进一步的优点和有利特征。
附图说明
61.参考附图,下面是作为示例引用的本发明的实施例的更详细描述。在附图中:
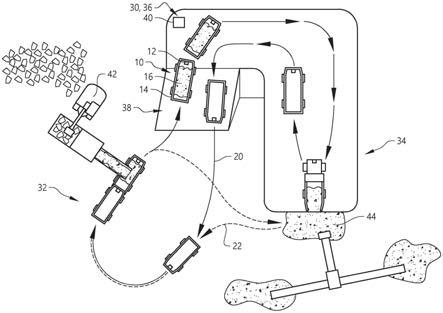
62.图1是工地的俯视图,在该工地中,运输车形式的自主车辆受到控制,以根据本发明的实施例运行,
63.图2是根据本发明的实施例的、受到控制以在工地上运行的挖掘机的立体图,并且
64.图3是概述了根据本发明的实施例的方法的一般步骤的流程图。
具体实施方式
65.现在将在下文中参考附图更全面地描述本发明,在附图中示出了本发明的示例性实施例。然而,本发明可以以许多不同的形式来实施,且不应被解释为限于本文中阐述的实施例;相反,提供这些实施例是为了充分性和完整性。在整个说明书中,相同的附图标记表示相同的元件。在本详细描述中,主要参考将物料从工地上的装载位所运送到卸载位所的运输车、以及在期望地点处挖掘并将挖掘出的物料移动到另一位置的挖掘机来讨论根据本发明的方法的各种实施例。应当注意,这决非限制本发明的范围,本发明同样适用于各种各样的不同自主车辆,尤其是分别在起始位所或起始位置与目标位所或目标位置之间运行的作业机械。
66.在图1和图2中,参考工地中的自主车辆的运行和控制来描述本发明的实施例。在图1中,该自主车辆是被例示为运输车的作业机械,而在图2中,该自主车辆是被例示为挖掘机的作业机械。在图3中,参考流程图描述了一种用于控制工地中的自主车辆的方法。
67.图1是采石场形式的工地的立体图,在该工地中,运输车10正在运行。在该工地上运行的运输车或其它自主车辆的数量是示例性的。应认识到,可以存在更多在该工地上运行的运输车或其它自主车辆。这些运输车或其它自主车辆中的至少一些可以是共同协作组(即在执行具体任务时进行协作的一组自主车辆)的成员。
68.图1中的运输车10被控制,以根据至少包括设定路径20和设定速度的预定轨迹运行。该设定速度可以沿着设定路径20变化。运输车10通常配备有硬件和软件资源12,例如,包括所述预定轨迹的存储器,或者是用于接收指令以根据所述预定轨迹运行的器件。例如,该存储器可以被配置成存储与带有相关联的行进速度的行进路径(这里由所述设定路径20表示)有关的历史数据,假定运输车10已经根据所述预定轨迹运行过至少一次,同时在该存储器上存储和记录了数据。运输车10还包括:马达,例如电动马达,其至少用于推进运输车10;以及至少一个电池,该至少一个电池被配置成向马达供应能量。此外,运输车10包括被构造成执行作业的辅助设备,这里为用于运送物料16的车斗14的形式,以及用于操作车斗14的器件(通常是用于使车斗14倾斜以便倾倒或排出物料16的倾斜缸)。该辅助设备优选由所述至少一个电池供电。运输车10的硬件和软件资源12还可以被配置成在运输车10在工地中运行(即,行进和/或执行作业)时测量该电池的能量用量。
69.图1中的设定路径20从起始位所30延伸到第一目标位所32并进一步延伸到第二目标位所34和最终位所36,运输车10可以在充电站40处充电时停驻在起始位所30,该第一目标位所32是运输车10从进料破碎机42接收物料16的装载位所32,该第二目标位所34是运输车10在卸载场所44处卸载或排出物料16的卸载位所,该最终位所36这里与起始位所30相同,运输车10可以停驻在此和/或充电。在图1中的特定示例中,运输车10可以最初开始于起始位所30处,然后直接移动到装载位所32,而不经过卸载位所34。当已经在装载位所32处接收了物料16之后,该运输车通常在装载位所32和卸载位所34之间运行,直到需要进一步充电,或者直到希望或需要另一种类型的路径改变。因而,运输车10根据作业序列运行,遵循所述预定轨迹和所述设定路径20,这里是从起始位所30至最终位所36的行进距离。在图1的具体示例中,所述作业序列是作业循环。应当注意,在所述作业序列期间,运输车10不需要在起始位所30或最终位所36停止,而是可以在两个目标位所32、34之间运行,以便如上所述地重复地接收物料和排出物料。可替代地,所述预定轨迹的设定路径20忽略充电站40,并将
进料破碎机42处的第一目标位所30设定为“起始位所”,并将卸载场所44处的第二目标位所34设定为“目标位所”。在这样的实施例中,所述设定路径可以包括与所述起始位所相同的最终位所,以便运输车10在作业循环中运行。根据至少一个示例实施例,运输车10包括不同作业序列的若干个预定轨迹,例如,一个预定轨迹与对运输车10充电有关,一个预定轨迹与在进料破碎机42和卸载场所44之间运行运输车10有关。
70.因而,在图1的具体示例中,运输车10的预定轨迹包括据此推进运输车10的所述设定路径20,并且包括执行作业的动作,例如在第一目标位所32和第二目标位所34之间运送物料,以及使车斗14倾斜以在第二目标位所34处排出物料16。
71.根据本发明的方法,所述预定轨迹经受所添加的预定义的变化,以形成测试轨迹,参考图3进一步描述这一点。与所述预定轨迹相比,所述预定义的变化可以例如包括所述设定路径20的变化或在所述设定路径20的至少一部分上的所述设定速度的变化。
72.在图1中,所述测试轨迹的设定路径22由虚线22指示,该设定路径22从进料破碎机42处的第一目标位所32延伸到卸载场所44处的第二目标位所34。因而,图1示出了作为所述预定轨迹的设定路径20的第一路径20、以及作为所述测试轨迹的设定路径22的第二路径22。如图1的示例实施例中所示,第二路径22比第一路径20短。更详细地,第二路径22被布置成避开第一路径20的上坡路径部分38,并以更直接的方式到达卸载场所44(在图1中,以局部立体图用倾斜表面指示了上坡路径部分38)。由此,由于相对较短的路径以及避开了上坡路径部分38,所以与根据所述预定轨迹运行运输车10相比,所述测试轨迹和第二路径22的作业序列的能量用量可以降低。在图1的示例中,用于形成所述测试轨迹的所述预定义的变化还包括执行作业的所述动作的变化,因为与运输车10在第一路径20上的物料运送距离相比,运输车10在第二路径22上的物料运送距离更短。
73.此外,第二路径22未被绘制成经过充电站40,并且未达到与第一路径20相同的高度(第一路径20的更高的高度例如可以便于在卸载场所44处排出物料)。然而,使运输车10沿着第二路径22运行仍可能是有益的,至少直到需要从更高的高度(如第一路径20所提供的)执行在卸载场所44处排出物料之前或者当运输车10需要在充电站40充处电之前仍可能是有益的。根据另一示例实施例,所述预定义的变化是例如在上坡路径部分38之前的所述设定速度的变化。在这样的示例中,所述测试轨迹的设定路径将与所述预定轨迹的设定路径20相同,但这两个轨迹将不同,因为所述设定路径20的至少一部分的设定速度不同。参考图3进一步描述了根据所述预定轨迹或所述测试轨迹来运行运输车10的选择标准。
74.图2示出了其中自主车辆10静止但仍受根据本发明的方法控制的示例实施例。在图2中,该自主车辆是包括辅助设备112(例如铲斗114和动臂116)的挖掘机110。挖掘机110可以关于执行本发明的方法而与图1中的运输车10被对应地配备。因而,挖掘机110可以包括硬件和软件资源(例如存储器)、以及至少一个电池和马达,用于推进该挖掘机以及对由辅助设备112执行作业的动作提供能量。
75.图2中的挖掘机110被控制成根据至少包括设定路径120和设定速度的预定轨迹运行。与参照图1描述的设定路径20相比,不沿着设定路径120推进图2的自主车辆,而是,该设定路径120描述了通过移动辅助设备112(即,这里为动臂116和铲斗114)而行进的距离。
76.图2中的设定路径120从起始位置130延伸到目标位置132,在该起始位置130,辅助设备112被布置成使得铲斗114可以在期望的地点挖掘,在该目标位置132,挖掘机110排出
或倾倒铲斗114的物料。之后,辅助设备112可以移动到最终位置,例如通过返回至起始位置130。因而,挖掘机110根据作业序列运行,遵循所述预定轨迹和所述设定路径120(这里为从起始位置130到目标位置132的行进距离)。另外或可替选地,挖掘机110的作业序列包括将挖掘机110从静止位所(即,表示起始位所)推进到目标位所。例如,其中铲斗114在期望的地点挖掘的起始位置130可以位于当前静止位所处,其中挖掘机110排出或倾倒铲斗114的物料的目标位置132可以位于目标位所处。因而,在图2的具体示例中,挖掘机110的预定轨迹包括辅助设备112据此移动的设定路径120,并且可另外包括挖掘机110本身在从静止位所移动到目标位所时的移动。
77.对应于图1中的运输车10,挖掘机110的预定轨迹经受所添加的预定义的变化,以形成测试轨迹。与所述预定轨迹相比,所述预定义的变化例如可以包括所述设定路径120的变化或者在所述设定路径120的至少一部分上的设定速度的变化。参考图3进一步描述了根据所述预定轨迹或所述测试轨迹来运行挖掘机110的选择标准。
78.图3是描述了根据本发明的实施例的步骤的流程图。图3中描述的方法可以根据图1的运输车10和/或图2的挖掘机110来使用。优选地,该方法的至少一些步骤由计算机程序或者由携载计算机程序的计算机可读介质提供。该计算机程序包括程序代码组件,该程序代码组件用于当所述程序在计算机(例如自主车辆的硬件资源)上运行时执行参考图3描述的方法的步骤。
79.在步骤550中,接收自主车辆的作业序列的预定轨迹。该预定轨迹至少包括设定路径和设定速度。在图1和图2中提供了具有作业序列的这种预定轨迹的示例。此外,该预定轨迹可以包括自主车辆的辅助设备的执行作业的动作。
80.在步骤552中,将预定义的变化添加到所述预定轨迹以形成测试轨迹。所述预定义的变化至少包括所述设定路径或所述设定速度的变化。如上文已经参考图1和图2描述的,所述预定义的变化可以另外包括所述辅助设备的执行作业的所述动作的变化,或者是执行作业的所述动作的路径位置(例如图1的运输车10的物料运送距离)的变化。所述预定义的变化可以包括噪声、或者所述设定路径和/或设定速度的阶跃改变,或者可以由该噪声或阶跃改变组成。另外或可替选地,所述预定义的变化由安全参数和车辆极限界定。
81.在步骤554中,对所述测试轨迹和所述预定轨迹上的能量用量进行比较。当然,该方法可以包括确定所述预定轨迹和/或所述测试轨迹的能量用量的隐式步骤,例如,通过计算该自主车辆的至少一个电池的能量用量来确定。
82.在步骤556中,确定所比较的能量用量是否达到预设标准。该预设标准例如至少可以是所述测试轨迹具有比所述预定轨迹低的能量用量。另外或可替选地,该预设标准可以将所比较的能量用量与所述作业序列的消耗时间、所述设定路径的消耗时间、最小平均速度、最大允许振动和/或所期望的电池用量相关联。
83.在步骤558中,响应于确定所比较的能量用量达到预设标准,将所述测试轨迹设定为自主车辆的新的设定轨迹。如果确定所比较的能量用量未达到预设标准,则保持所述预定轨迹,或者通过后续步骤执行(根据步骤552)新的测试轨迹。
84.应当理解,该自主车辆通常配备有本领域技术人员已知的硬件和软件资源,例如相关联的硬件资源,诸如与处理软件一起以一个或多个处理器的形式提供的处理单元,其中该处理软件包括计算机程序存储器,该计算机程序存储器包括用于执行本发明的方法的
计算机程序代码。
85.应当理解,本发明不限于上文所述和附图中示出的实施例;相反,本领域技术人员将认识到,可以在本发明的范围内进行许多修改和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1