一种轨道式智能巡检机器人的云台的制作方法
1.本发明涉及轨道式巡检机器人、云台,特别是涉及一种轨道式智能巡检机器人的云台。
背景技术:
2.轨道式智能巡检机器人是目前定线巡查的主要技术之一,其原理类似于地铁、云轨,就是利用轨道引导机器人行走,机器人上搭载摄像头、传感器等探测设备,从而利用轨道的引导进行巡查。在与本案同日申报的、名为“一种巡检机器人的行走机构”的中国发明专利申请中对本案涉及的轨道式智能巡检机器人有相关的记载。
3.目前的巡检机器人主要搭载两轴或三轴云台,并在云台上安装摄像头,从而通过摄像头获取图像以进行巡检。目前的云台与摄像头之间是独立的零部件,一般是采用摄像头悬挂在云台上进行组装,十分类似于目前无人机用的云台,这种设计技术成熟、可以直接采购。但是其体积偏大,而且对摄像头的防护比较低,而本实施例的轨道式智能巡检机器人长时间用于室外、工厂室内等场景的巡检。因此对于防水防尘的要求比较高,而且对稳定性,耐用性要求也比较高,经过实测,目前独立的云台安装摄像头的方式故障率比较高,而且云台的转动依赖齿轮传动,因此体积也偏大。
4.对此发明人设计了一种轨道式智能巡检机器人的云台,其集成度高、结构简单、皮实耐用。
技术实现要素:
5.有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是提供一种轨道式智能巡检机器人的云台。
6.为实现上述目的,本发明提供了一种轨道式智能巡检机器人的云台,包括云台盒、至少一个摄像盒,所述云台盒包括云台框,所述云台框内部中空且两端开口,云台框的两个开口端分别通过不同的云台端板封闭,所述云台框顶部与旋转架密封装配;
7.所述旋转架上设置有旋转筒,所述旋转筒装入旋转罩内,所述旋转罩设置在云台架上,云台架安装在轨道式智能巡检机器人的底部;
8.所述旋转筒套装在第一电机轴上且与之可相对圆周转动、不可轴向移动装配,所述第一电机轴与云台架装配固定,所述第一电机轴另一端装入第一电机内,所述第一电机安装在云台框内,所述云台框内部还安装有第二电机,第二电机的第二电机轴穿过云台端板后与摄像盒装配固定,摄像盒内安装有摄像机或热成像仪,摄像机用于采集图像,热成像仪用于获取目标区域热成像图像或数据。
9.优选地,所述云台端板上设置有云台套筒,第二电机轴穿过云台套筒后与第二摄像壳装配固定。
10.优选地,所述云台端板与云台框通过第二密封圈密封装配,所述云台框与旋转架之间通过第一密封圈密封装配。
11.优选地,所述旋转筒装入旋转罩内的部分与旋转限位轮不可相对圆周转动装配,所述旋转限位轮上设置有旋转限位块;所述旋转罩与第二限位螺钉装配,第二限位螺钉装入旋转罩内且用于阻挡旋转限位块的通过,以限制旋转限位轮的旋转角度。
12.优选地,第一电机轴内部中空且其顶部与电滑环的转子装配,电滑环的定子与云台架装配,且电滑环的转子与第三导线一端电连接,电滑环的定子与轨道式智能巡检机器人的控制器、电池电连接,从而实现轨道式智能巡检机器人通过电滑环向第三导线供电并与第三导线进行信号通讯;所述第一电机轴内部中空,从而使得第三导线装入第一电机轴内。
13.优选地,摄像盒有两个,其中一个摄像盒包括第二摄像壳、第一摄像壳,所述第一摄像壳安装在第二摄像壳一端上,且第一摄像壳、第二摄像壳之间通过第三密封圈密封装配,所述第一摄像壳上安装有第一镜片,所述第二摄像壳内安装有摄像机,摄像机的图像采集端与第一镜片正对;所述在第二摄像壳内侧设置有安装台,所述安装台通过第一连接螺栓与第一摄像支架的第一支架安装板装配,所述第一摄像支架与摄像机的外壳装配固定,且第一摄像支架上设置有第一支架支撑板,所述第一支架支撑板与第二摄像壳的内壁贴紧,从而支撑第一摄像支架,第一支架安装板具有弹性。
14.优选地,另一个摄像盒包括第二摄像壳、第一摄像壳,所述第一摄像壳安装在第二摄像壳一端上,且第一摄像壳、第二摄像壳之间通过第三密封圈密封装配,此摄像盒的第二摄像壳内安装有热成像仪,所述热成像仪卡紧安装在第二摄像支架内,所述第二摄像支架上分别设置有弹性支板、第二支架安装板,所述弹性支板具有弹性且贴紧在与之对应的第二摄像壳的内壁上,第二连接螺栓穿过第二支架安装板后和与之对应的安装台装配,从而将第二摄像支架安装在第二摄像壳内,弹性支板具有弹性。
15.优选地,所述第二摄像壳上还安装有限位销,所述限位销装入云台套筒内且位于两个第一限位螺钉之间,两个第一限位螺钉分别与云台套筒装配且用于阻碍限位销的通过。
16.优选地,所述第一电机、第二电机均采用伺服电机,所述第一摄像壳、第二摄像壳的外壁上设置有数个减重槽。
17.优选地,所述云台框上还安装有补光灯,所述补光灯通电后发出光,从而照亮摄像机采集图像的区域。
18.本发明的有益效果是:
19.本发明采用第一电机实现摄像盒水平方向转动、通过第二电机实现摄像盒垂直方向转动,从而可以实现摄像盒的两轴旋转,能够满足各角度的图像采集需求。另外第一电机、第二电机均采用伺服电机,其转动精度高,从而直接利用电信号控制其转动角度,一方面可以直接去除传统齿轮等传动、调速结构,另一方面可以增加控制精度,也就是既能够降低成本,又能够增加最终的控制效果,从而为后续的智能巡检提供基础。
20.本发明的将摄像机、热成像仪单独安装在不同的摄像盒内,且对摄像盒进行密封设计,能够实现较好的防水防尘效果,从而使得本发明可以在恶劣环境中长时间使用。另外摄像机、热成像仪分别通过第一摄像支架、第二摄像支架和与之对应的摄像盒之间卡紧、弹性装配,从而既能够保证摄像机、热成像仪安装的稳固性,又能够保证摄像机、热成像仪的减震效果,且结构简单。
附图说明
21.图1是本发明的使用状态示意图。
22.图2是本发明的使用状态示意图。
23.图3是本发明的结构示意图。
24.图4是本发明的结构示意图。
25.图5是本发明的结构示意图。
26.图6是图5中a-a剖视图。
27.图7是图5中b-b剖视图。
28.图8是图5中c-c剖视图。
29.图9是图5中d-d剖视图。
30.图10是本发明的结构示意图。
31.图11是本发明的结构示意图。
32.图12是本发明的结构示意图。
33.图13是本发明的结构示意图。
34.图14是本发明的结构示意图。
35.图15是摄像盒、摄像头处结构示意图。
36.图16是摄像盒的结构示意图。
37.图17是摄像盒的结构示意图。
具体实施方式
38.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
39.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
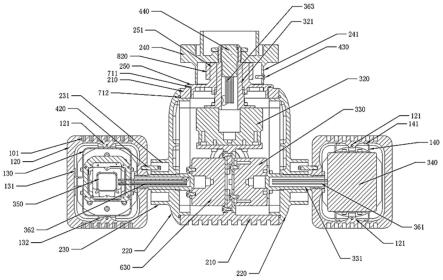
40.参见图1-图17,本实施例的云台安装在轨道式智能巡检机器人900的底部,用于获取轨道式智能巡检机器人行走时的图像,以实现巡检的目的。所述云台包括云台盒200、至少一个摄像盒100,所述云台盒200包括云台框210,所述云台框210内部中空且两端开口,云台框210的两个开口端分别通过云台端板220封闭,所述云台端板220上设置有云台套筒230;所述云台框210顶部与旋转架250密封装配。优选地,所述云台端板220与云台框210通过第二密封圈712密封装配,所述云台框210与旋转架250之间通过第一密封圈711密封装配。
41.所述旋转架250上设置有旋转筒251,所述旋转筒251装入旋转罩241内且与旋转限位轮820不可相对圆周转动装配,所述旋转限位轮820上设置有旋转限位块821;所述旋转罩241与第二限位螺钉430装配,第二限位螺钉430装入旋转罩241内且用于阻挡旋转限位块821的通过,以限制旋转限位轮820的旋转角度。所述旋转罩241设置在云台架240上,云台架240安装在轨道式智能巡检机器人900的底部,从而实现整个云台与轨道式智能巡检机器人900的装配。
42.所述旋转筒251套装在第一电机轴321上且与之可相对圆周转动、不可轴向移动装配,第一电机轴321内部中空且其顶部与电滑环440的转子装配,电滑环440的定子与云台架240装配,且电滑环440的转子与第三导线363一端电连接,电滑环的定子与轨道式智能巡检机器人900的控制器、电池等电连接,从而实现轨道式智能巡检机器人900通过电滑环向第三导线363供电并与第三导线363进行信号通讯。所述第一电机320与云台架240装配固定,所述第一电机320另一端装入第一电机320内,第一电机320启动后能够驱动第一电机320圆周转动,所述第一电机轴321内部中空,从而使得第三导线363装入第一电机320内。
43.所述第一电机320安装在云台框210内,所述云台框210内部还安装有第二电机330,第二电机330的第二电机轴331穿过云台套筒230后与摄像盒100的第二摄像壳120装配固定,第二电机330启动后能够驱动第二电机轴331圆周转动,从而带动摄像盒100同步转动。使用时,通过第一电机320、第二电机330可以分别实现摄像盒100的两轴转动调节,从而可以使得摄像机采集到各个角度的画面。云台架240与旋转架250可相对圆周转动装配,使用时,第一电机320驱使第一电机轴321圆周转动,由于第一电机轴321与云台架240相对固定,因此会反向驱动第一电机320转动,第一电机320带动整个云台框210转动,云台框210带动旋转架250同步转动,从而实现摄像盒在水平面上的转动。旋转架250转动时会带动旋转限位轮820转动,旋转限位轮820通过旋转限位块821与第二限位螺钉430的配合限制云台框210转动的角度。
44.所述摄像盒100还包括第一摄像壳110,所述第一摄像壳110安装在第二摄像壳120一端上,且第一摄像壳110、第二摄像壳120之间通过第三密封圈713密封装配,所述第一摄像壳110上安装有第一镜片811,所述第二摄像壳120内安装有摄像机340,摄像机340的图像采集端与第一镜片811正对,从而可以通过第一镜片811调节摄像机340的广角、滤镜等。优选地,所述在第二摄像壳120内侧设置有安装台121,所述安装台121通过第一连接螺栓450与第一摄像支架140的第一支架安装板142装配,所述第一摄像支架140与摄像机340的外壳装配固定,且第一摄像支架140上设置有第一支架支撑板141,所述第一支架支撑板141与第二摄像壳120的内壁贴紧,从而支撑第一摄像支架140。这种设计使得摄像机340通过第一摄像支架140与第二摄像壳120装配,而且使用时可以先将第一摄像支架140与摄像机340装配,然后将第一摄像支架140通过第一连接螺栓450与安装台121装配,从而可以大大方便摄像机340的拆装,同时也能有效地固定摄像机340。第一支架安装板142具有弹性,从而既能够实现第一摄像支架140与第二摄像壳之间的卡紧,又能够实现对摄像机340的减震。
45.所述第二摄像壳120上还安装有限位销420,所述限位销420装入云台套筒230内且位于两个第一限位螺钉410之间,两个第一限位螺钉410分别与云台套筒230装配且用于阻碍限位销420的通过。这种设计能够限制第二摄像壳120的转动角度,从而避免第二摄像壳120转动角度过大后引起线路缠绕、折断。
46.所述第一电机320、第二电机330均采用伺服电机,伺服电机可以实现精确的转动角度输出,从而无需齿轮等传动设计就能精确控制第二摄像壳120的转动角度,从而大大简化结构,不仅能够降低成本,也便于后续的维护。
47.本实施例中,摄像盒100有两个,每个摄像盒100分别对应一个第二电机330,另一个摄像盒100的第二摄像壳120内安装有热成像仪350,且此摄像盒100的第一摄像壳110上安装有第二镜片812,第二镜片812用于对热成像仪350进行聚焦,所述热成像仪350卡紧安
装在第二摄像支架130内,所述第二摄像支架130上分别设置有弹性支板131、第二支架安装板132,所述弹性支板131具有弹性且贴紧在与之对应的第二摄像壳120的内壁上,第二连接螺栓460穿过第二支架安装板132后和与之对应的安装台121装配,从而将第二摄像支架130安装在第二摄像壳120内。而弹性支板131具有弹性,其不仅能够为热成像仪提供支撑,也能够为热成像仪提供弹性缓冲(减震)。
48.所述热成像仪350用于对目标环境获取热成像图像,且热成像仪350通过第二导线362与云台框210内的电源、控制器电连接;所述摄像机340用于直接获取图像,且摄像机通过第一导线361与云台框210内的电源、控制器电连接;本实施例中,电源可以是dc-dc模块,其用与将轨道式智能巡检机器人900内的电池的电流引入,并转换成预设电压后输入热成像仪350、摄像机340、第一电机、第二电机使用。本实施例的控制器用于收发解析控制指令,并进行参数运算、程序运行,可以选用plc、mcu、cpu等。
49.优选地,第二电机轴331内部中空,第一导线、第二导线分别穿过与之对应的第二电机轴331后进入云台框,从而实现对第一导线、第二导线的密封。
50.优选地,所述第一摄像壳110、第二摄像壳120的外壁上设置有数个减重槽101,所述减重槽101一方面用于降低整个摄像盒的重量,另一方便还起到散热的作用。
51.优选地,所述云台框210上还安装有补光灯310,所述补光灯310通电后可以发出光线,从而照亮摄像机340采集图像的区域,以增加采集图像的精度,其原理和目前手机的补光灯(闪光灯)相同。
52.本发明未详述之处,均为本领域技术人员的公知技术。
53.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1