一种井工煤矿自动驾驶人车的制作方法
1.本发明涉及智能化井工煤矿辅助运输领域,具体涉及一种井工煤矿自动驾驶人车。
背景技术:
2.现代井工煤矿的工作人员需要通过井下辅助运输系统送到煤矿各个地方。煤矿井下辅助运输系统可分为轨道辅助运输和无轨辅助运输两种,无轨辅助运输多以胶轮为行走机构,采用防爆柴油机、蓄电池等为牵引动力,车辆驾驶、车辆调度均采用人工的方式,智能化程度很低。现有自动驾驶模式均为地面应用场合,适用于自动驾驶模式的车辆也均为非煤矿使用车辆。而煤矿环境恶劣,对于设备稳定性要求极高,地面自动驾驶系统的硬件不能保证在煤矿井下能够正常使用。而且井下无gps信号,导致目前的自动驾驶车辆在井下没有位置信息。随着各大煤矿智能化建设的需求越来越大,辅助运输的智能化改造已经变的极为迫切,而目前国内井工煤矿辅助运输智能化车辆仍是空白。
技术实现要素:
3.(一)解决的技术问题针对现有技术的问题,本发明提供了一种井工煤矿自动驾驶人车。
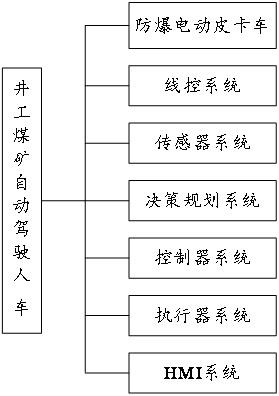
4.(二)技术方案为实现井工煤矿辅助运输料车的自动驾驶,本发明提供如下技术方案:一种井工煤矿自动驾驶人车包括防爆电动皮卡车、线控系统、传感器系统、决策规划系统、控制器系统、执行器系统、hmi系统,各个子系统安装在防爆电动皮卡车的不同位置,系统之间数据、指令、信息互通。
5.作为本发明的优选技术方法系统,所述防爆电动皮卡车为一种轻型防爆纯电动车辆,以防爆锂电池为动力源,以防爆电机为驱动装置。整车设计方案遵循轻量化原则,在保证车辆结构强度的前提下,最大程度减轻整车质量。采用圆筒薄壁电源箱,底盘、各种电器件的支撑件等机械结构采用轻量结构设计;采用防爆22kw永磁盘型高能量密度电机;采用适合防爆盘型永磁电机的专用车桥,以及两级直齿传动方式,配合永磁盘型电机及专用控制器,提高传动系统效率;采用电动助力转向和独立液压泵电机方案,两台电机仅在需要时工作;在制动踏板设置电位计,当踩踏板制动时,电机由做功模式切换到发电回馈模式,车辆将在电制动与机械制动的共同作用下实现车辆的减速或停止,同时将制动时产生的部分能量通过电机发电模式回馈到电池,回收车辆制动能量。
6.作为本发明的优选技术方法系统,所述线控系统具备人工驾驶与线控的实时切换硬件装置:采用制动踏板与方向盘两种方式以保证能够及时人工安全接管。线控系统通过电信号连接控制和驱动执行机构,取代原有的机械驱动和液压驱动。线控转向采用eps转角控制方案;线控制动采用制动踏板开度控制方案;车辆线控驱动提供电机转速控制和扭矩控制两种线控模式;整车线控采用四路can和一路lin的通信方式,实现驱动、制动、转向、灯
光、喇叭等线控功能。
7.作为本发明的优选技术方法系统,所述传感器系统包括前视摄像头、激光雷达、前向毫米波雷达、后向毫米波雷达、dgps、uwb基站、惯性导航、磁导航。通过多个传感器获取周围障碍物及道路等与驾驶任务相关的环境信息,并将这些信息反馈给决策规划系统,作为决策的重要依据。
8.作为本发明的优选技术方法系统,所述决策规划系统包含任务规划、行为规划、路径规划、速度规划四大模块。任务规划模块负责安排特定任务、规划全局路径和监控系统状态。任务规划模块以a*搜索算法为基础,根据车辆状态和任务信息,结合高精度地图中的路段拓扑关系,规划出一条可由当前位置经过全部任务点到达终点的路径作为全局路径,同时在行驶过程中不断更新行程状态。行为规划采用一种基于行为树的行为规划方法,选择所需的条件节点和动作节点并按照一定逻辑关系进行组合,满足不同的决策功能需求。路径规划模块从高精地图里提取出自车所要行驶的参考路径,当参考路径上有障碍物的时候,以自适应换道避障算法生成避障路径,供下游的速度规划模块和控制器系统使用。速度规划是在路径规划的一个或者若干个备选路径基础上,综合优选出最佳路径,充分考虑道路曲率、动静态障碍物、障碍物预测信息、行为指令、速度与加速度连续性、底层执行特性以及结合优秀驾驶员驾驶习惯等因素,综合规划出行驶路径上的车辆期望行驶速度,并下发至控制器系统。
9.作为本发明的优选技术方法系统,所述控制器系统根据期望轨迹和车辆底层反馈的实时状态,通过控制车辆的驱动系统、制动系统和转向系统来控制车辆精确、舒适、平稳、安全地跟踪期望轨迹。控制器系统主要包括四个模块:纵向控制模块、横向控制模块、紧急制动控制模块和业务与交互服务模块。纵向控制模块根据车辆当前状态(车辆状态、本车车速、驱动模式、油门开度以及制动压力)和道路期望信息(期望速度、期望加速度、控制模式)等信息实现速度跟随功能。横向控制模块接收目标轨迹信息和车辆底层状态反馈信息,设计合理的路径跟踪控制器,输出eps的控制指令,保证车辆稳定、精确、舒适地完成各种工况的路径跟踪。紧急制动控制器模块根据输入的障碍物信息,并基于车辆当前状态,在危险场景下实现车辆的紧急制动功能,保证车辆的行驶安全。业务与交互服务模块根据上层决策输入的相关业务功能信息,将该信息输出给执行器系统,实现相关业务和交互功能。
10.作为本发明的优选技术方法系统,所述执行器系统包括驱动、制动、转向、档位,实时准确响应控制器系统的控制指令。驱动系统通过电子油门控制电动机扭矩;制动系统通过ehb等制动系统进行主动制动;转向系统采用电子助力转向系统,控制转向角度和转向力矩;线控档位实现车辆的档位控制。
11.作为本发明的优选技术方法系统,所述hmi系统通过wifi与决策规划系统和控制器系统进行信息交互,主要实现车辆状态监控、语音提醒和实时路径显示功能。
12.(三)显著效果与现有技术相比,本发明提供了一种井工煤矿自动驾驶人车,具备以下显著效果:1、防爆电动皮卡车为一种轻型防爆纯电动车辆,以防爆锂电池为动力源,以防爆电机为驱动装置,能够有效解决煤矿井下防爆柴油机车辆高噪音、高污染、高油耗的问题,对于改善井下作业环境,保障工人身心健康具有重要价值。采用圆筒薄壁电源箱,减轻电池组和固定和支撑件的质量,防爆后比能量能够达到60wh/kg以上。防爆22kw永磁盘型电机整
机结构仅有130kg,远小于普通径向电机质量。永磁电机的专用车桥采用两级直齿传动方式,远大于常规车桥锥齿传动效率,能够将传动效率提到最高。采用电动助力转向和独立液压泵电机方案,两台电机仅在需要时工作,避免液压油泵电机长时溢流作业的损耗,降低液压系统工作耗能。采用制动能量回收技术,提高能量利用率。
13.2、传感器系统采用前视摄像头、激光雷达、前向毫米波雷达、后向毫米波雷达、dgps、uwb基站、惯性导航、磁导航多个传感器,综合测量车辆自身、周围障碍物及道路等与驾驶任务相关的信息,并将这些信息(目标和道路信息)反馈给决策规划系统,解决了车辆位置、姿态和速度等信息实时检测问题。
14.3、决策规划系统接收来自传感器系统的信息,针对露天场景接收dgps+激光采集的高精度地图信息作为整体的路径规划,对于矿井巷道场景采用基于uwb道路拓扑标签方式,生成道路拓扑地图,然后结合上述传感器信息做出局部的路径规划,实现车辆的自主导航与自主循迹功能,并根据障碍物信息,进行合理的避障会车,解决了地面与井下复杂条件下的车辆导航问题。
附图说明
15.图1为本发明提出的一种井工煤矿自动驾驶人车系统组成示意图。
16.图2为本发明提出的一种井工煤矿自动驾驶人车决策规划系统组成图。
17.图3为本发明提出的一种井工煤矿自动驾驶人车控制系统组成图。
18.图4为本发明提出的一种井工煤矿自动驾驶人车hmi系统功能示意图。
具体实施方式
19.下面将结合本发明中实施的附图,对本发明进行详细、完整的描述,显然,所叙述的仅仅是本发明的一部分,并不是本发明的全部内容。
20.如图1,一种井工煤矿自动驾驶人车,主要包括防爆电动皮卡车、线控系统、传感器系统、决策规划系统、控制器系统、执行器系统、hmi系统。
21.如图2,井工煤矿自动驾驶人车决策规划系统包括任务规划、行为规划、路径规划、速度规划四大模块。输入数据是传感器系统与执行器系统的定位和感知信息,经过任务规划和行为规划节点发出全局路径和动作指令,再经过路径规划和速度规划得到一条带位置速度信息的期望路径,供控制系统使用,用来做路径跟踪和速度跟踪。在任务规划模块中,接收任务指令、车辆状态以及地图信息,在任务点或道路拓扑发生变化时综合考虑行驶时间、行程能耗等优化准则规划最优路径,具体为从起点经过全部任务点到达终点的路网级全局路径。同时提供期望到达时间、剩余电量估计、剩余里程估计以及每条道路的指导速度。在行为规划模块中,接收并处理上游节点发布的数据消息,根据当前行驶环境和车辆状态,利用决策树判断出当前车辆应该采取什么样的动作,最终根据行为管理模块发布的行为语句以及下游节点返回的已执行的行为语句进行分析与去重,最终输出行为指令语句。在路径规划模块中,首先进行现有原始路径的提取,并接收决策节点发出的路径规划方面的语句指令信息,使用行为树的结构对当前路径进行局部路径规划,生成多条可行路径,输出给速度规划模块使用。在速度规划模块中,接收决策节点发出的速度规划方面的语句指令信息和路径规划发出的多条路径,使用行为树的结构,通过评估选取其中的最优路径,并
对路径赋速度值,然后发出这条带有速度信息的路径。
22.如图3,井工煤矿自动驾驶人车控制器系统组成包括四个模块:纵向控制、横向控制、紧急制动控制器和业务与交互服务功能。控制器系统的输入数据是决策规划系统输出的目标轨迹信息以及定位模块和车辆底层模块反馈的车辆实时状态信息,另外控制器系统需要从感知模块得到障碍物信息,并且通过车辆平台特性表得到车辆加速度与制动力矩/驱动力矩的关系。根据以上信息设计合理的控制器得到跟踪期望轨迹所需要的横纵向控制指令、服务功能指令下发至车辆控制器,并评估自身控制能力等级反馈至决策规划系统,保证车辆能够安全平稳精确地跟踪期望轨迹。纵向控制模块:根据车辆当前状态(本车车速、驱动模式、油门开度以及制动压力)和道路期望信息(期望速度、期望加速度、控制模式)等信息实现速度跟随功能。横向控制模块:接收目标轨迹信息和车辆底层状态反馈信息,设计合理的路径跟踪控制器,输出eps的控制指令,保证车辆稳定、精确、舒适地完成各种工况的路径跟踪。紧急制动控制器模块:根据输入的障碍物信息,并基于车辆当前状态,在危险场景下实现车辆的紧急制动功能,保证车辆的行驶安全。业务与交互服务功能模块:根据上层决策输入的相关业务功能信息,将该信息输出给执行器系统,实现相关业务和交互功能。
23.如图4,井工煤矿自动驾驶人车hmi系统主要实现车辆状态监控、语音提醒及实时路径显示功能。
24.1)车辆状态监控主要包括车辆实时位置、实时速度、车辆电量、系统故障状态及即使模式等状态监控信息;2)语音提醒主要实现煤矿辅助运输智能化系统与装备车辆在乘客上下车阶段的语音播报提醒,同时对系统故障进行语音预警。
25.3)车辆实时行驶路径显示,在车载hmi上可显示简易地图,并显示实时煤矿辅助运输智能化系统与装备车辆的运行路线。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1