一种集群无人机的通信控制系统
1.本发明属于无人机通信技术技术领域,具体涉及一种集群无人机的通信控制系统。
背景技术:
2.无人机按应用领域,可分为军用与民用,军用方面,无人机分为侦察机和靶机,民用方面,无人机+行业应用,是无人机真正的刚需;目前在航拍、农业、植保、自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途。
3.无人机集群中,需要使用到集群无人机的通信控制系统,以便于对无人机进行有序的控制,但是,目前现有的集群无人机通信控制装置,不能够同时控制多台无人机,在无人机集群操作时每架无人机都需要专人进行控制,浪费人力和财力,降低其工作效率。因此,我们需提出一种集群无人机的通信控制系统。
技术实现要素:
4.本发明的目的在于提供一种集群无人机的通信控制系统,通过控制模块、选择模块、gps定位模块、数据传输模块、遥控模块、储存模块和飞控模块的配合,可同时控制多台无人机,以解决上述背景技术中提出现有的集群无人机通信控制装置,不能够同时控制多台无人机的问题。
5.为实现上述目的,本发明采用了如下技术方案:
6.一种集群无人机的通信控制系统,包括箱体,所述箱体的内部分别安装有控制模块、选择模块、gps定位模块、数据传输模块、遥控模块、储存模块、电源模块和飞控模块,所述选择模块、gps定位模块和数据传输模块均嵌装在箱体内壁的一侧,所述储存模块、电源模块和飞控模块均嵌装在箱体内壁的另一侧,所述遥控模块嵌装在箱体内底部,所述控制模块包括处理器,所述处理器嵌装在箱体的内顶部。
7.优选的,所述控制模块还包括控制面板和显示屏,所述显示屏嵌装在箱体外壁,所述控制面板安装在显示屏的下方,所述控制面板的顶部设置有操作按键,所述控制面板分别与显示屏和处理器电性连接。
8.优选的,所述处理器的输出端分别与选择模块、显示屏、gps定位模块、数据传输模块、遥控模块、飞控模块和储存模块的输入端单向电连接,所述处理器的输入端分别与控制面板和电源模块的输出端单向电连接。
9.优选的,所述gps定位模块包括gps定位器,用于将无人机位置数据传输至显示屏上进行显示,所述控制面板与选择模块电性连接,所述控制面板通过操作按键选择同步控制无人机数量,并将数据传输至选择模块。
10.优选的,所述数据传输模块与遥控模块电性连接,所述遥控模块与飞控模块电性连接,所述飞控模块与多台无人机电性连接。
11.优选的,所述遥控模块和飞控模块均包括单片机,且单片机设置为stm32f103单片机,所述飞控模块还包括测量传感器,所述测量传感器设置为mpu6050传感器,所述测量传感器用于感应无人机的飞行高度,所述遥控模块用于控制接收数据传输模块传输的数据,并将数据传输至飞控模块,通过飞控模块控制无人机的飞行。
12.优选的,所述电源模块包括pus电源,所述pus电源分别与显示屏和控制板电性连接,所述储存模块包括多个硬盘,多个所述硬盘均与处理器电性连接,所述硬盘的容量设置为2t。
13.优选的,所述控制面板的下方设置有双开门,所述双开门的一端通过合页与箱体的外壁转动连接,所述双开门另一端通过螺栓安装有把手。
14.优选的,所述箱体的底部通过螺栓安装有固定板,所述固定板的底部安装有滚轮。
15.优选的,所述箱体两侧外壁均通过螺栓安装有两个短杆,两个所述短杆之间固定有推杆,所述箱体的顶部开设有散热口。
16.本发明提出的一种集群无人机的通信控制系统,与现有技术相比,具有以下优点:
17.1、本发明主要是通过控制面板输入查看范围内的无人机数量及位置,控制面板将数据发送至处理器,处理器将数据发送至gps定位模块,gps定位模块将无人机位置数据在显示屏上进行显示,然后人们选择需要同步控制的无人机数量,此时人们通过控制面板进行选择,并将数据发送至选择模块,选择模块将数据发送至处理器,处理器将数据发送至储存模块,同时,处理器将数据发送至数据传输模块,数据传输模块将数据发送至遥控模块,遥控模块将数据发送至飞控模块,飞控模块将数据发送至被控制的无人机,无人机进行同步飞行操作,解决了现有的集群无人机通信控制装置不能够同时控制多台无人机的问题;
18.2、本发明在箱体的两侧设置的推杆,且在箱体的底部通过固定板安装有滚轮,推动推杆,推杆通过固定板和滚轮移动至指定位置,解决了现有的集群无人机通信控制装置不方便移动的问题,通过向外拉动把手,打开双开门,将无人机相关的辅助工具放置其中,减少占用空间,方便人们使用。
附图说明
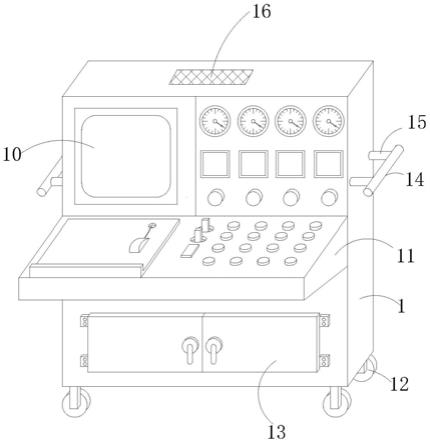
19.图1为本发明的箱体内部结构示意图;
20.图2为本发明的系统框图;
21.图3为本发明实施例2的箱体立体结构示意图;
22.图4为本发明实施例4的箱体立体结构示意图;
23.图中:1、箱体;2、控制模块;201、处理器;3、选择模块;4、gps定位模块;5、数据传输模块;6、遥控模块;7、储存模块;8、电源模块;9、飞控模块;10、显示屏;11、控制面板;12、滚轮;13、双开门;14、推杆;15、短杆;16、散热口。
具体实施方式
24.为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明
保护的范围。因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
25.实施例1
26.本发明提供了如图1
‑
2所示的一种集群无人机的通信控制系统,包括箱体1,箱体1的内部分别安装有控制模块2、选择模块3、gps定位模块4、数据传输模块5、遥控模块6、储存模块7、电源模块8和飞控模块9,选择模块3、gps定位模块4和数据传输模块5均嵌装在箱体1内壁的一侧,储存模块7、电源模块8和飞控模块9均嵌装在箱体1内壁的另一侧,遥控模块6嵌装在箱体1内底部,控制模块2包括处理器201,处理器201嵌装在箱体1的内顶部;
27.控制模块2还包括控制面板11和显示屏10,显示屏10嵌装在箱体1外壁,控制面板11安装在显示屏10的下方,控制面板11的顶部设置有操作按键,控制面板11分别与显示屏10和处理器201电性连接;
28.处理器201的输出端分别与选择模块3、显示屏10、gps定位模块4、数据传输模块5、遥控模块6、飞控模块9和储存模块7的输入端单向电连接,处理器201的输入端分别与控制面板11和电源模块8的输出端单向电连接;
29.gps定位模块4包括gps定位器,用于将无人机位置数据传输至显示屏10上进行显示,控制面板11与选择模块3电性连接,控制面板11通过操作按键选择同步控制无人机数量,并将数据传输至选择模块3;
30.数据传输模块5与遥控模块6电性连接,遥控模块6与飞控模块9电性连接,飞控模块9与多台无人机电性连接;
31.遥控模块6和飞控模块9均包括单片机,且单片机设置为stm32f103单片机,飞控模块9还包括测量传感器,测量传感器设置为mpu6050传感器,测量传感器用于感应无人机的飞行高度,遥控模块6用于控制接收数据传输模块5传输的数据,并将数据传输至飞控模块9,通过飞控模块9控制无人机的飞行;
32.电源模块8包括pus电源,pus电源分别与显示屏10和控制板电性连接,储存模块7包括多个硬盘,多个硬盘均与处理器201电性连接,硬盘的容量设置为2t;
33.使用时,首先通过控制面板11输入查看范围内的无人机数量及位置,控制面板11将数据发送至处理器201,处理器201将数据发送至gps定位模块4,gps定位模块4将无人机位置数据在显示屏10上进行显示,然后人们选择需要同步控制的无人机数量,此时人们通过控制面板11进行选择,并将数据发送至选择模块3,选择模块3将数据发送至处理器201,处理器201将数据发送至储存模块7,同时,处理器201将数据发送至数据传输模块5,数据传输模块5将数据发送至遥控模块6,遥控模块6将数据发送至飞控模块9,飞控模块9将数据发送至被控制的无人机,无人机进行同步飞行操作,解决了现有的集群无人机通信控制装置不能够同时控制多台无人机的问题。
34.实施例2
35.如图1
‑
3所示,相同部件不再重复赘述,与实施例1不同的是,箱体1的底部通过螺栓安装有固定板,固定板的底部安装有滚轮12;
36.箱体1两侧外壁均通过螺栓安装有两个短杆15,两个短杆15之间固定有推杆14,箱
体1的顶部开设有散热口16,通过推动推杆14,推杆14通过固定板和滚轮12将箱体1移动至指定位置,便于集群无人机通信控制装置的移动,给集群无人机通信控制装置的使用带来便捷;
37.实施例3
38.如图1
‑
2所示,相同部件不再重复赘述,与实施例1和实施例2不同的是,控制面板11的下方设置有双开门13,双开门13的一端通过合页与箱体1的外壁转动连接,双开门13另一端通过螺栓安装有把手,通过向外拉动把手,打开双开门13,将无人机相关的辅助工具放置其中,减少占用空间,方便人们使用。
39.实施例4
40.如图1
‑
2、图4所示,相同部件不再重复赘述,与实施例1不同的是,控制面板11的下方设置有双开门13,双开门13的一端通过合页与箱体1的外壁转动连接,双开门13另一端通过螺栓安装有把手,通过向外拉动把手,打开双开门13,将无人机相关的辅助工具放置其中,减少占用空间,方便人们使用;
41.箱体1的底部通过螺栓安装有固定板,固定板的底部安装有滚轮12;箱体1两侧外壁均通过螺栓安装有两个短杆15,两个短杆15之间固定有推杆14,箱体1的顶部开设有散热口16,通过推动推杆14,推杆14通过固定板和滚轮12将箱体1移动至指定位置,便于集群无人机通信控制装置的移动,给集群无人机通信控制装置的使用带来便捷;
42.综合以上,多台无人机在具体控制时,首先通过控制面板11输入查看范围内的无人机数量及位置,控制面板11将数据发送至处理器201,处理器201将数据发送至gps定位模块4,gps定位模块4将无人机位置数据在显示屏10上进行显示,然后人们选择需要同步控制的无人机数量;
43.此时人们通过控制面板11进行选择,并将数据发送至选择模块3,选择模块3将数据发送至处理器201,处理器201将数据发送至储存模块7,同时,处理器201将数据发送至数据传输模块5,数据传输模块5将数据发送至遥控模块6,遥控模块6将数据发送至飞控模块9,飞控模块9将数据发送至被控制的无人机,无人机进行同步飞行操作,解决了现有的集群无人机通信控制装置不能够同时控制多台无人机的问题。
44.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
45.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1