基于变增益观测器设计的旋翼无人机姿态控制器及方法与流程
1.本发明属于无人机领域,具体涉及一种基于变增益观测器设计的旋翼无人机姿态控制器及方法。
背景技术:
2.无人机越发多的出现在人们的视野之中的同时,其安全性和稳定性也需要得到进一步的加强。当前市面上大多数无人机仍采用传统的pid控制算法进行控制,其控制精度和抗干扰能力较弱,不能应对很多极端情况;
3.韩京清教授所研究出的adrc自抗扰算法可以较好地在 一些方面解决干扰估算、参数估计等难题。而当前已有的部分无人机自抗扰控制器中,对模型与算法的结合仍不完善,需要进行修正。
4.在无人机飞行过程中,由于存在外部扰动,建模不匹配等等不确定性的影响,估计值与实际值之间存在较大误差。尤其是在实际的飞行过程中,初始阶段的观测误差非常容易累计,导致起飞时观测误差过大,甚至可能导致起飞侧翻等情况。
技术实现要素:
5.为了克服现有无人机飞行过程中,估计值与实际值之间存在较大误差,起飞时观测误差过大,导致起飞侧翻的问题,本发明提供一种基于变增益观测器设计的旋翼无人机姿态控制器及方法,本发明提高了无人机控制的稳定性和抗干扰能力,解决了观测器初始累计误差较大的问题。
6.本发明采用的技术方案为:
7.一种基于变增益观测器设计的旋翼无人机姿态控制器,包括外环比例控制器、跟踪微分器、非线性控制器、无人机和变增益扩展状态观测器,所述的外环比例控制器输出端与跟踪微分器输入端连接,所述的跟踪微分器输出端和变增益扩展状态观测器输出端均与非线性控制器输入端连接,所述的非线性控制器输出端与无人机输入端连接,所述的无人机输出端分别与变增益扩展状态观测器输入端和外环比例控制器的输入端连接。
8.所述的跟踪微分器为td跟踪微分器,用于对期望信号进行滤波处理。
9.所述的跟踪微分器的表达式为:
[0010][0011]
其中,δ(t)为期望的角速率信息,δ
′
和δ
′2分别代表对期望角速率的跟踪量和对期望角速率微分的跟踪量;r为td的控制器增益,sign 为函数。
[0012]
所述的sign函数取值为:
[0013]
[0014]
所述的非线性控制器为nlsef。
[0015]
所述的非线性控制器nlsef的表达式为:
[0016]
u(t)=(α1fal(e(t),σ,τ1)-z2(t))/b0[0017]
其中,b0表示控制器反馈增益,u(t)表示输出量,α1为非线性控制器增益,e(t)为控制器输入即角速率差,fal为函数。
[0018]
所述的fal函数形式为:
[0019][0020]
其中,α为非线性因子,取值范围为(0,1);δ为滤波因子。
[0021]
所述的变增益扩展状态观测器表达式为:
[0022][0023]
其中,y
′
(t)表示实际角速率值,z1(t),z2(t)分别表示第一和第二观测量,e1(t)为观测误差,u(t)表示输出量;存在且有界,k1,k2为观测器的两个增益,并使得多项式s2+k1s+k2满足 hurwitz条件;r(t)为设定的时变的观测器增益,表达式如下:
[0024][0025]
其中,a和q取值均大于0。
[0026]
一种基于变增益观测器设计的旋翼无人机姿态控制方法,其特征在于:将期望的角度信息ρ(t)与实际状态量y(t)的差值姿态外环误差量ε(t)经过外环比例控制器处理得到期望的角速率信息δ(t),期望的角速率信息δ(t)经过跟踪微分器处理,得到对期望角速率的跟踪量δ
′
,对期望角速率的跟踪量δ
′
与期望角速率的第一观测量z1(t)做差得到非线性控制器输入信号即角速率差e(t),角速率差e(t)以及观测总扰动值z2(t)作为非线性控制器的输入,非线性控制器的输出量u(t)输送给变增益扩展状态观测器并输入传感器获取的实际角速率值y
′
(t),进行计算得到第一、第二观测量z1(t)和z2(t),同时,u(t)通过消息体发布接收结构传输给混控器,经混控器处理后得到作动器的输入,最后由作动器进行输出。
[0027]
本发明的有益效果为:
[0028]
本发明通过设置变增益扩展状态观测器teso,在增益时变观测器使得观测器增益从较小值逐渐增大,可有效减少初始观测误差较大时引起的跟踪器跟踪不上的影响。
[0029]
以下将结合附图进行进一步的说明。
附图说明
[0030]
图1本发明旋翼无人机姿态控制器的整体结构框图。
[0031]
图2传统串级pid控制器阶跃信号仿真结果图。
[0032]
图3本发明控制器阶跃信号仿真结果图。
[0033]
图4传统扩展状态观测器eso阶跃信号观测误差仿真结果图。
[0034]
图5本发明teso阶跃信号观测误差仿真结果图。
具体实施方式
[0035]
实施例1:
[0036]
为了克服现有无人机飞行过程中,估计值与实际值之间存在较大误差,起飞时观测误差过大,导致起飞侧翻的问题,本发明提供图 1-图5所示的一种基于变增益观测器设计的旋翼无人机姿态控制器及方法,本发明提高了无人机控制的稳定性和抗干扰能力,解决了观测器初始累计误差较大的问题。
[0037]
一种基于变增益观测器设计的旋翼无人机姿态控制器,包括外环比例控制器1、跟踪微分器2、非线性控制器3、无人机4和变增益扩展状态观测器5,所述的外环比例控制器1输出端与跟踪微分器2 输入端连接,所述的跟踪微分器2输出端和变增益扩展状态观测器5 输出端均与非线性控制器3输入端连接,所述的非线性控制器3输出端与无人机4输入端连接,所述的无人机4输出端分别与变增益扩展状态观测器5输入端和外环比例控制器1的输入端连接。
[0038]
如图1所示,本发明中通过外环比例控制器1、跟踪微分器2、非线性控制器3和变增益扩展状态观测器5配合使用在无人机4上,通过跟踪微分器对期望信号进行滤波处理,通过变增益扩展状态观测器5,以实现对观测器可能出现的初始误差积累问题进行补偿,并增加观测器在无人机飞行过程中的稳定性。
[0039]
实施例2:
[0040]
基于实施例1的基础上,本实施例中,优选的,所述的跟踪微分器2为td跟踪微分器,用于对期望信号进行滤波处理。
[0041]
优选的,所述的非线性控制器3为nlsef。
[0042]
所述的变增益扩展状态观测器表达式为:
[0043][0044]
其中,y
′
(t)表示实际角速率值,z1(t),z2(t)分别表示第一和第二观测量,e1(t)为观测误差,u(t)表示输出量;存在且有界,k1,k2为观测器的两个增益,并使得多项式s2+k1s+k2满足 hurwitz条件;r(t)为设定的时变的观测器增益,表达式如下:
[0045][0046]
其中,a和q取值均大于0。
[0047]
一种基于变增益观测器设计的旋翼无人机姿态控制方法,其特征在于:将期望的角度信息ρ(t)与实际状态量y(t)的差值姿态外环误差量ε(t)经过外环比例控制器1处理得到期望的角速率信息δ(t),期望的角速率信息δ(t)经过跟踪微分器2处理,得到对期望角速
率的跟踪量δ
′
,对期望角速率的跟踪量δ
′
与期望角速率的第一观测量z1(t)做差得到非线性控制器3输入信号即角速率差e(t),角速率差e(t)以及观测总扰动值z2(t)作为非线性控制器3的输入,非线性控制器3的输出量u(t)输送给变增益扩展状态观测器5并输入传感器获取的实际角速率值y
′
(t),进行计算得到第一、第二观测量z1(t)和z2(t),同时,u(t) 通过消息体发布接收结构传输给混控器,经混控器处理后得到作动器的输入,最后由作动器进行输出。
[0048]
本发明的原理为:在控制器设计中,将无人机4控制分为位置控制和姿态控制,分别为无人机控制中的外环和内环控制。而在姿态控制中,又可将其分为姿态外环和姿态内环控制。其中,姿态外环对角度进行控制,得到期望的角速率控制量;姿态内环对角速率进行控制,得到最终姿态控制器输出信息。该输出信息通过消息体发布接收结构传输给混控器,经混控器处理后得到作动器的输入,最后由作动器进行输出。
[0049]
本发明中,姿态外环控制采用传统p控制,姿态内环采用一阶的自抗扰控制算法。其优点在于:相对传统的串级pid控制,控制精度更高,抗干扰能力更强;而相对于目前已有的部分自抗扰控制器,其参数更少方便调参,同时使用的是一阶自抗扰控制,更加贴合实际的控制模型。观测器采用变增益扩展状态观测器5,以实现对观测器可能出现的初始误差积累问题进行补偿,并增加观测器在无人机飞行过程中的稳定性。
[0050]
本发明中,优选的,跟踪微分器2为td,其表达式为:
[0051][0052]
其中,δ(t)即期望的角速率信息,δ
′
和δ
′2分别代表对期望角速率的跟踪量和对期望角速率微分的跟踪量。r为td的控制器增益。sign 函数即数学符号函数:
[0053][0054]
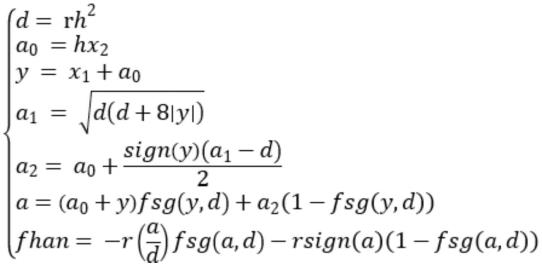
在实际应用中,为方便程序运行及工程应用,有离散形式如下:
[0055][0056]
其中,fhan函数为最速控制综合函数,记:
[0057]
fsg(x,d)=(sign(x+d)-sign(x-d))/2
[0058]
那么,fhan(x1,x2,r,h)函数可表示成:
[0059][0060]
其中,r为速度因子,r越大,跟踪得就越快。h为滤波因子,h越大,滤波效果就越好。x1为跟踪输入的状态变量,x2为跟踪输入量的导数。
[0061]
跟踪微分器td在此算法中的作用主要是对期望信号进行滤波处理。考虑到姿态内环为角速率控制,信号变化很快,经过滤波处理后再进行控制可以得到较好的控制结果。
[0062]
本发明中,优选的,非线性控制器3为nlsef,其表达式:
[0063]
u(t)=(α1fal(e(t),σ,τ1)-z2(t))/b0[0064]
其中,b0表示控制器反馈增益,u(t)表示输出量,α1为非线性控制器增益,e(t)为控制器输入即角速率差,其中的fal函数形式如下:
[0065][0066]
其中,α为非线性因子,取值范围为(0,1);δ为滤波因子。
[0067]
本发明中,优选的,变增益扩展状态观测器5为teso,其表达式为:
[0068][0069]
其中,y
′
(t)表示实际角速率值,由无人机4上的传感器获取;z1(t), z2(t)分别表示第一和第二观测量,在本发明中分别为对期望角速率的观测和总扰动值;e1(t)为观测误差,u(t)表示输出量,z2(t)总扰动的导数存在且有界;k1,k2为观测器的两个增益,并使得多项式s2+k1s+k2满足hurwitz条件;r(t)设定为时变的观测器增益,表达式如下:
[0070][0071]
其中,a和q取值均大于零。
[0072]
本发明中,图2为传统串级pid控制器阶跃信号仿真结果图。图 3为本发明控制器阶跃信号仿真结果图。
[0073]
本发明对各自对应的无人机4进行测试,给无人机4加入大小为 0.27
°
的期望俯仰角阶跃信号。从图2和图3对比可以看出,与传统的pid控制器相比,本发明控制器下的控制超调量更小,响应更加平滑,抗干扰能力有明显提升。
[0074]
本发明中图2和图3中的横坐标为时间t,纵坐标为角度值。根据图3可知,本发明的响应值更接近于期望值,误差小。
[0075]
本发明中,图4为传统扩展状态观测器eso阶跃信号观测误差仿真结果图。图5为本发明teso阶跃信号观测误差仿真结果图。
[0076]
图4与图5中分别对各自对应的无人机4输入大小为0.27
°
的期望滚转角阶跃信号。从图4和图5的对比可以看出,经过变增益观测器输出的总扰动值初始变化更小,有效抑制了总扰动的突变,并使得之后的总扰动值浮动更小。
[0077]
本发明中图4和图5中的横坐标为时间t,纵坐标为总扰动值。根据图5和图4的对比可知,增益时变观测器使得观测器teso增益从较小值逐渐增大,可有效减少初始观测误差较大时引起的跟踪微分器td跟踪不上的影响。
[0078]
以上举例仅仅是对本发明的举例说明,并不构成对本发明的保护范围的限制,凡是与本发明相同或相似的设计均属于本发明的保护范围之内。本发明中未详细描述的装置结构及其方法步骤均为现有技术,本发明中将不再进行进一步的说明。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1