系统监测模型生成及监测方法、处理器芯片以及工业系统与流程
1.本发明涉及监测技术领域,具体涉及一种系统监测模型生成及监测方法、处理器芯片以及工业系统。
背景技术:
2.在工业设备系统中,一般可以通过传感器来采集该系统的工业设备的输入输出信号。为了对工业设备系统中的设备的运行状态进行监控,在获取了工业设备系统中的输出信号后,会对输出信号进行异常数据监测;常用的数据异常监测方法包括:阈值法、箱型图等传统方法,也有聚类、孤立森林、随机森林、神经网络等机器学习类算法。
3.然而,传统方式数据异常监测方法中,传感器读取到的当前数据受系统历史数据的影响,导致传统的数据异常监测方法的精确度低、误诊率高。机器学习类算法虽然精度高、误诊率低,但需要有大量的前期数据积累,且运行算力消耗过大,在实际场景应用中存在部署效率低下、成本昂贵等问题。
技术实现要素:
4.本发明的目的是提供了一种系统监测模型生成及监测方法、处理器芯片以及工业系统,能够基于待监测系统的历史参考数据,构建待监测系统的测量模型与判别模型,并且综合了待监测系统的测量与判别过程,能够达到较好的检测精度;并且,仅需要待监测系统少量的历史参考数据,对算力要求较低,适用于部署在处理能力较低的处理芯片中,降低了成本,提升了部署效率。
5.为实现上述目的,本发明提供了一种系统监测模型生成方法,包括:基于待监测系统的数据变化模型,构建待监测系统的测量模型与判别模型;根据所述待监测系统的参考历史数据,得到所述测量模型中的测量参数的值;基于所述参考历史数据与所述测量参数的值,得到所述判别模型中的判别参数的值。
6.本发明还提供了一种系统监测方法,基于上述系统监测模型生成方法所生成的测量模型与待监测系统中传感器测量的输出测量值,预测待监测系统的输出预测值;基于上述系统监测模型生成方法所生成的判别模型,确定所述输出预测值是否存在异常;若确定所述输出预测值存在异常,发出警报。
7.本发明还提供了一种处理器芯片,处理器芯片用于上述系统监测模型生成方法,和/或上述的系统监测方法。
8.本发明还提供了一种工业系统,包括上述的处理器芯片、连接于所述处理器芯片的工业设备以及传感器,所述传感器分别连接于所述处理器芯片与所述工业设备。
9.本发明实施例中,能够基于待监测系统的历史参考数据,构建待监测系统的测量模型与判别模型,并且综合了待监测系统的测量与判别过程,能够达到较好的检测精度;并且,仅需要待监测系统少量的历史参考数据,对算力要求较低,适用于部署在处理能力较低的处理芯片中,降低了成本,提升了部署效率。
10.在一个实施例中,所述基于待监测系统的数据变化模型,构建待监测系统的测量模型与判别模型,包括:
11.基于待监测系统的数据变化模型,得到所述待监测系统的回归模型;
12.根据所述数据变化模型与所述回归模型,得到所述待监测系统的状态矩阵更新方程式;
13.根据所述状态矩阵更新方程式,构建所述待监测系统的测量模型与判别模型。
14.在一个实施例中,所述根据所述状态矩阵更新方程式,构建所述待监测系统的测量模型与判别模型,包括:
15.基于所述状态矩阵更新方程式与待监测系统中传感器的精度参数,构建所述待监测系统的测量模型;
16.基于所述状态矩阵更新方程式与构建的所述测量模型,生成所述待监测系统的判别模型。
17.在一个实施例中,所述数据变化模型的表达式为:
[0018][0019]
其中,ω
i
、ω
i
′
以及ω0表示所述数据变化模型中的测量参数,x(n)表示n时刻所述待监测系统中的传感器测得的输出测量值,r(n
‑
1)表示n
‑
1时刻所述待监测系统的输入值,l表示预设的滑窗长度;
[0020]
所述回归模型的表达式为:
[0021][0022]
其中,ω
i
、ω
i
′
以及ω0表示所述回归模型中的测量参数,表示n时刻所述回归模型的输出预测值,r(n
‑
1)表示n
‑
1时刻所述待监测系统的输入值,x(n)表示n时刻所述待监测系统中的传感器测得的输出测量值,l表示预设的滑窗长度;
[0023]
所述待监测系统的状态矩阵更新方程式为:
[0024]
s(n+1)=(1
‑
∈)*s(n)+∈*v2(n);
[0025]
其中,s(n)表示n时刻所述待监测系统的状态矩阵,∈表示所述状态矩阵的更新系数,v(n)表示n时刻所述数据变化模型与所述回归模型之间的残差。
[0026]
在一个实施例中,所述测量模型的表达式为:
[0027]
y(n)=c*z(n)+d*u(n)+v
′
(n);
[0028]
其中,y(n)表示n时刻所述待监测系统的真实输出值,其中,y(n)表示n时刻所述待监测系统的真实输出值,
[0029]
v
′
(n)~n(0,s
′
(n)),c=
[1 0 ... 0],d=[0 0 ... 0],0],v
′
(n)表示所述待监测系统中的传感器的测量误差,s
′
(n)表示所述待监测系统中的传感器的精度,s(n)表示n时刻所述待监测系统的状态矩阵。
[0030]
在一个实施例中,所述判别模型的表达式为:
[0031][0032]
其中,e
n
表示待监测系统在n时刻的真实误差,k0表示所述判别模型中的判别参数,c=[1 0 ...],s
′
(n)表示待监测系统中传感器的精度,s(n)表示n时刻所述待监测系统的状态矩阵。
[0033]
在一个实施例中,所述根据所述待监测系统的参考历史数据,得到所述测量模型中的测量参数的值,包括:
[0034]
根据所述待监测系统的参考历史数据,递归求解得到所述回归模型中的测量参数的值,作为所述测量模型中的测量参数的值。
[0035]
在一个实施例中,所述根据所述待监测系统的参考历史数据,递归求解得到所述回归模型中的测量参数的值,包括:
[0036]
在每次迭代过程中,基于当前迭代时间的历史参考数据,获取所述回归模型的估计误差以及系统整体误差,并判断本次迭代是否满足预设的迭代条件;
[0037]
若本次迭代满足预设的迭代条件,输出所述回归模型当前的测量参数的值;
[0038]
若本次迭代不满足预设的迭代条件,更新迭代时间,并进行迭代。
[0039]
在一个实施例中,所述基于所述参考历史数据与所述测量参数,得到所述判别模型中的判别参数,包括:
[0040]
基于所述参考历史数据与所述测量参数,采用天牛须搜索算法对所述判别模型中的判别参数进行整定。
[0041]
在一个实施例中,所述基于所述参考历史数据与所述测量参数,采用天牛须搜索算法对所述判别模型中的判别参数进行整定,包括:
[0042]
利用所述测量参数与所述判别模型中的判别参数构建天牛的位置,设置所述天牛须搜索算法的适应度函数,并对天牛进行初始化;
[0043]
基于所述历史参考数据、天牛的当前位置以及所述适应度函数,得到天牛在当前
位置的适应度;
[0044]
计算天牛左右两个触须的适应度,并更新天牛的位置;
[0045]
更新天牛的步长、须长以及迭代次数,并判断是否满足预设的迭代条件;
[0046]
若满足预设的迭代条件,终止所述天牛须搜索算法,并基于当前的天牛位置输出各所述判别参数的值;
[0047]
若不满足预设的迭代条件,将更新后的天牛的位置代入到所述适应度函数中,重复所述天牛须搜索算法。
[0048]
在一个实施例中,所述天牛须搜索算法的适应度函数为:
[0049][0050]
其中,表示天牛的当前位置,r表示所述天牛须搜索算法在本次迭代中异常数据点的查全率,n表示所述天牛须搜索算法在本次迭代中异常数据点的误检率;
[0051]
天牛的位置更新公式为:
[0052][0053]
其中,表示天牛在第i次迭代中的位置,step表示天牛当前的步长,f表示天牛下一步要走的方向。
附图说明
[0054]
图1与图2是根据本发明第一实施例的系统监测模型生成方法的具体流程图;
[0055]
图3是图2的系统监测模型生成方法的步骤2013的具体流程图;
[0056]
图4是图2的系统监测模型生成方法的步骤203的具体流程图;
[0057]
图5是根据本发明第一实施例的采用天牛须搜索算法对判别模型中的判别参数进行整定的示意图;
[0058]
图6是根据本发明第一实施例的采用天牛须搜索算法在一次迭代过程中的判别示意图;
[0059]
图7是根据本发明第二实施例的系统监测方法的具体流程图;
[0060]
图8是根据本发明第四实施例的工业系统的示意图。
具体实施方式
[0061]
以下将结合附图对本发明的各实施例进行详细说明,以便更清楚理解本发明的目的、特点和优点。应理解的是,附图所示的实施例并不是对本发明范围的限制,而只是为了说明本发明技术方案的实质精神。
[0062]
在下文的描述中,出于说明各种公开的实施例的目的阐述了某些具体细节以提供对各种公开实施例的透彻理解。但是,相关领域技术人员将认识到可在无这些具体细节中的一个或多个细节的情况来实践实施例。在其它情形下,与本技术相关联的熟知的装置、结构和技术可能并未详细地示出或描述从而避免不必要地混淆实施例的描述。
[0063]
除非语境有其它需要,在整个说明书和权利要求中,词语“包括”和其变型,诸如“包含”和“具有”应被理解为开放的、包含的含义,即应解释为“包括,但不限于”。
[0064]
在整个说明书中对“一个实施例”或“一实施例”的提及表示结合实施例所描述的
特定特点、结构或特征包括于至少一个实施例中。因此,在整个说明书的各个位置“在一个实施例中”或“在一实施例”中的出现无需全都指相同实施例。另外,特定特点、结构或特征可在一个或多个实施例中以任何方式组合。
[0065]
如该说明书和所附权利要求中所用的单数形式“一”和
“”
包括复数指代物,除非文中清楚地另外规定。应当指出的是术语“或”通常以其包括“或/和”的含义使用,除非文中清楚地另外规定。
[0066]
在以下描述中,为了清楚展示本发明的结构及工作方式,将借助诸多方向性词语进行描述,但是应当将“前”、“后”、“左”、“右”、“外”、“内”、“向外”、“向内”、“上”、“下”等词语理解为方便用语,而不应当理解为限定性词语。
[0067]
本发明第一实施方式涉及一种系统监测模型生成方法,应用于处理器芯片,该处理器芯片能够执行本实施例中的系统监测模型生成方法生成待监测系统的测量模型和判别模型,测量模型能够用来获取待监测系统的输出预测值,判别模型能够用来判断待监测系统的输出预测值是否存在异常,从而实现了对待监测系统的实时监测;其中,待监测系统可以为工业系统,例如变压器系统、风电系统等。
[0068]
请参考图1,本实施例的系统监测模型生成方法包括:步骤101,基于待监测系统的数据变化模型,构建待监测系统的测量模型与判别模型;步骤102,根据待监测系统的参考历史数据,得到测量模型中的测量参数的值;步骤103,基于参考历史数据与测量参数的值,得到判别模型中的判别参数的值。
[0069]
采用本实施例中的系统监测模型生成方法,能够基于待监测系统的历史参考数据,构建待监测系统的测量模型与判别模型,并且综合了待监测系统的测量与判别过程,能够达到较好的检测精度;并且,仅需要待监测系统少量的历史参考数据,对算力要求较低,适用于部署在处理能力较低的处理芯片中,降低了成本,提升了部署效率。
[0070]
下面结合待监测系统的具体数学模型进行详细说明,仅为示例性说明,并非实现本发明的必须。
[0071]
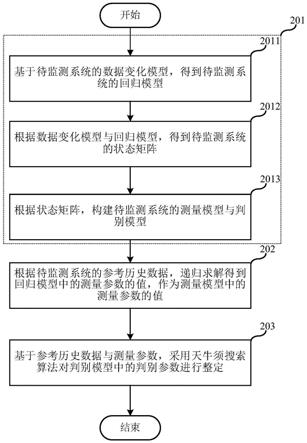
本实施方式的系统监测模型生成方法的具体流程如图2所示。
[0072]
步骤201,包括以下子步骤:
[0073]
子步骤2011,基于待监测系统的数据变化模型,得到待监测系统的回归模型。
[0074]
数据变化模型的表达式为:
[0075][0076]
其中,ω
i
、ω
i
′
以及ω0表示数据变化模型中的测量参数,x(n)表示n时刻待监测系统中的传感器测得的输出测量值,r(n
‑
1)表示n
‑
1时刻待监测系统的输入值,1表示预设的滑窗长度。其中,ω0为数据变化模型的偏置,以待监测系统为变压器系统为例,变压器系统的输入r(n)为输入到变压器系统中的电压,变压器系统的输出x(n)为变压器系统中的传感器测量的变压器系统输出的电压。
[0077]
基于上述的数据变化模型的式(1),可以得到回归模型的表达式:
[0078][0079]
其中,ω
i
、ω
i
′
以及ω0表示回归模型中的测量参数,表示n时刻回归模型的输出预测值,r(n
‑
1)表示n
‑
1时刻待监测系统的输入值,x(n)表示n时刻待监测系统中的传感
器测得的输出测量值,1表示预设的滑窗长度,ω
i
、ω
i
′
以及ω0即为回归模型中的待求解参数。
[0080]
子步骤2012,根据数据变化模型与回归模型,得到待监测系统的状态矩阵。
[0081]
基于上述的数据变化模型的式(1)与回归模型的式(2),可以得到:
[0082][0083]
其中,v(n)表示n时刻数据变化模型与回归模型之间的残差。
[0084]
基于上述式(2)与式(3),可以得到:
[0085][0086]
基于上式(1)、式(2)以及式(3),便可以得到待监测系统的状态矩阵更新方程式:
[0087]
s(n+1)=(1
‑
∈)*s(n)+∈*v2(n)式(5)
[0088]
其中,s(n)表示n时刻待监测系统的状态矩阵,∈表示状态矩阵的更新系数。
[0089]
由上述式(5)可知,v(n)服从均值为0,标准差为s(n)的正态分布,v(n)~n(0,s(n))。
[0090]
接下来,定义
[0091]
基于上述式(4)与矩阵更新方程式(5),可得:
[0092][0093]
其中,其中,
[0094]
子步骤2013,根据状态矩阵,构建待监测系统的测量模型与判别模型。
[0095]
请参考图3,子步骤2013包括以下子步骤:
[0096]
子步骤20131,基于状态矩阵更新方程式与待监测系统中传感器的精度参数,构建待监测系统的测量模型。
[0097]
具体的,待监测系统的真实输出值与传感器的测量值之间的关系可以表示为:
[0098]
y(n)=x(n)+v
′
(n)式(7)
[0099]
其中,y(n)表示n时刻待监测系统的真实输出值,x(n)表示n时刻待监测系统中的传感器测得的输出测量值,v
′
(n)表示传感器的测量误差。
[0100]
以s
′
(n)表示待监测系统中传感器的精度,v
′
(n)服从均值为0,标准差为s
′
(n)的
正态分布,v
′
(n)~n(0,s
′
(n))。
[0101]
基于上述式(6),可以得到待监测系统的测量模型:
[0102]
y(n)=c*z(n)+d*u(n)+v
′
(n)式(8)
[0103]
其中,y(n)表示n时刻待监测系统的真实输出值,v
′
(n)表示传感器的测量误差,c=[1 0 ... 0],d=[0 0 ... 0]。
[0104]
子步骤20132,基于状态矩阵更新方程式与构建的测量模型,生成待监测系统的判别模型。
[0105]
具体的,根据待监测系统n
‑
1时刻传感器的测量值估计n时刻传感器的测量值具体表达式如下:
[0106][0107]
n时刻传感器的测量值的协方差p
n|n
‑1可以表示为:
[0108][0109]
根据待监测系统在n
‑
1时刻真实输出值估计n时刻真实输出值具体表达式如下:
[0110][0111]
n时刻待监测系统的真实输出值的协方差可以表示为:
[0112][0113]
待监测系统在n时刻的真实误差e
n
可以表示为:
[0114][0115]
en的方差可以表示为:
[0116][0117]
由此可以得到待监测系统的判别模型:
[0118][0119]
其中,k0表示判别模型中的判别参数,另外待监测系统的矩阵更新方程式中的矩阵更新系数,也是该判别模型中的判别参数。
[0120]
步骤202,根据待监测系统的参考历史数据,递归求解得到回归模型中的测量参数的值,作为测量模型中的测量参数的值。
[0121]
具体的,回归模型中包含的测量参数与测量模型中所包含的测量参数是相同的,均为ω
i
、ω
i
′
以及ω0,由此,可以通过对回归模型进行递归求解得到各测量参数的值,在每次迭代过程中,基于当前迭代时间的历史参考数据,获取回归模型的估计误差以及系统整体误差,并判断本次迭代是否满足预设的迭代条件,若本次迭代满足预设的迭代条件,输出回归模型当前的测量参数的值,并停止迭代;若本次迭代不满足预设的迭代条件,更新迭代时间,并继续进行迭代。下面对具体迭代过程进行详细介绍。
[0122]
回归模型在t时刻的估计误差σ(t)的表达式为:
[0123]
[0124]
其中,x(t)表示t时刻待监测系统中的传感器测得的输出测量值,表示t
‑
1时刻回归模型的估计误差在回归模型的系统整体误差中所占的权重,1表示预设的滑窗长度。
[0125]
回归模型在t时刻的系统整体误差δ(t)的表达式为:
[0126]
δ(t)=g*δ(t
‑
1)+(1
‑
g)*sign(σ(t))式(17)
[0127]
其中,g表示滑动平均指数(为预设的常数),sign用于判定当前的数据点是否为异常点,τ表示大于1的常数。
[0128]
待监测系统的历史参考数据中包括了待监测系统在一段时间内的输入输出数据,在利用待监测系统的历史参考数据计算出回归模型在t时刻的估计误差σ(t)后,便可以基于该估计误差σ(t)值计算出回归模型在t时刻的系统整体误差δ(t)后,并判断本次迭代是否满足预设的迭代条件,迭代条件例如为:回归模型当前的系统整体误差小于预设的误差阈值,或者迭代次数达到预设的最大次数阈值。
[0129]
当判定本次迭代满足预设的迭代条件时,输出回归模型中当前的测试参数ω
i
、ω
i
′
以及ω0的值,并停止迭代;然后将这三个测试参数的值代入到测量模型中,便可以得到待监测系统的测量模型。
[0130]
当判定本次迭代不满足预设的迭代条件时,更新迭代时间,并基于更新后的迭代时间,更新回归模型的估计误差在回归模型的系统整体误差中所占的权重,t时刻回归模型的估计误差在回归模型的系统整体误差中所占的权重的表达式为:
[0131][0132]
其中,表示回归模型在t时刻的增益向量,表示回归模型在t时刻的逆矩阵,λ为在0和1之间的常数。
[0133]
在更新了当前时刻的权重后,基于历史参考数据与更新后的权重重新计算回归模型在t时刻的系统整体误差δ(t),并判断本次迭代是否满足预设迭代条件,并重复上述过程,直至迭代至满足预设的迭代条件,输出回归模型中当前的测试参数ω
i
、ω
i
′
以及ω0的值,从而可以将这三个测试参数的值代入到测量模型中,得到待监测系统的测量模型。
[0134]
步骤203,基于参考历史数据与测量参数,采用天牛须搜索算法对判别模型中的判别参数进行整定。
[0135]
请参考图4,步骤203包括以下子步骤:
[0136]
子步骤2031,利用测量参数与判别模型中的判别参数构建天牛的位置,设置天牛须搜索算法的适应度函数,并对天牛进行初始化。
[0137]
具体而言,基于步骤201中构建的判别模型的表达式(15)的过程可知,判别模型中待整定的判别参数包括:∈和k0,因此利用测量参数ω
i
、ω
i
′
以及ω0与判别模型中的判别参数∈和k0构建天牛须搜索算法(antennae search algorithm,简称bas)中天牛的位置
[0138]
天牛须搜索算法中所采用的适应度函数(即待优化的目标函数)为:
[0139][0140]
其中,r表示天牛须搜索算法在本次迭代中异常数据点的查全率,n表示天牛须搜索算法在本次迭代中异常数据点的误检率。待监测系统的历史参考数据中包括了待监测系统在一段时间内的输入输出数据,其中包括多个异常数据点并进行了标注,则查全率r表示在一次迭代过程中检查出的异常数据点的个数占历史参数数据中的异常数据点总数的比例,误检率n表示一次迭代过程中误检的异常数据点的个数占检查出的异常数据点总数的比例。
[0141]
对天牛进行初始化,初始化过程包括:对天牛位置的初始化,由于测量参数ω
i
、ω
i
′
以及ω0的值已经在步骤202中完成求解,对天牛位置初始化时,仅需对∈和k0进行初始化,初始化的方式包括:设置∈和k0的范围,然后可以从这个范围中随机产生∈和k0的值,本实施例中∈和k0的初始值分别为:∈=rands(1),k0=rands(1)。
[0142]
初始化过程还包括:对迭代次数的初始化,即设置迭代次数m=1,以及天牛左右触须的长度d、步长step。
[0143]
子步骤2032,基于历史参考数据、天牛的当前位置以及适应度函数,得到天牛在当前位置的适应度。
[0144]
具体而言,将天牛当前位置中(ω
i
,ω
i
′
,ω0,∈,k0)的参数值分别带入到测量模型、判别模型以及适应度函数中,然后将历史参考数据中各个时刻的输入信号代入到测量模型,由测量模型预测待监测系统在各个时刻的输出预测值,并利用判别模型对各个时刻的输出预测值进行异常判断,记录各个输出数据值的判断结果,然后基于各个时刻的数据预测值的判别结果与历史参考数据中各个时刻的数据点的异常标注情况进行统计,便能够计算得到天牛的当前位置的适应度
[0145]
子步骤2033,计算天牛左右两个触须的适应度,并更新天牛的位置。
[0146]
具体而言,在天牛须搜索算法中,天牛左触须与右触须之间的距离d0是固定的,可以用表示天牛左触须的坐标,表示右须坐标,表示天牛的质心坐标(即天牛的当前位置),并生成随机向量dir=rands(n,1)来表示天牛进行下一步飞行后的天牛头的朝向,即天牛右触须指向天牛左触须的向量的朝向是任意的,其中,n为大于或等于1的整数,dir=rands(n,1)归一化后得到:
[0147]
dir=dir/norm(dir);
[0148][0149]
因此,还可以表示成关于质心的表达式:
[0150][0151][0152]
随后将天牛左触须当前的坐标带入到适应度函数中,利用历史参考数据计算得到天牛左触须的适应度f
left
;同理,将天牛右触须当前的坐标带入到适应度函
数中,利用历史参考数据计算得到天牛右触须的适应度f
right
。其中,天牛左右触须的适应度的计算方式与天牛的适应度的计算方式大致相同,在此不再赘述。
[0153]
将天牛左触须的适应度f
left
与天牛右触须的适应度f
right
进行比较,能够得到天牛下一步的前进方向,如果f
left
<f
right
,为了探寻天牛的适应度的最小值,则天牛向着左触须方向行进,如果f
left
>f
right
,为了探寻天牛的适应度的最小值,则天牛向着右触须方向行进,可以采用如下的符号函数sign来表示:
[0154][0155]
其中,sign=1时,表示下一步天牛向着右触须方向行进;sign=
‑
1时,表示下一步天牛向着左触须方向行进。
[0156]
在确定天牛下一步的行进方向之后,便可以根据天牛当前的步长step来更新天牛的位置,天牛的位置更新公式为
[0157][0158]
其中,表示第m次迭代天牛的位置,step表示天牛的当前步长,d表示天牛下一步要走的方向。
[0159]
d=sign*(dir+k0*rands(n,1))。
[0160]
子步骤2034,更新天牛的步长、须长以及迭代次数,并判断是否满足预设的迭代条件。若是,则进入子步骤1034;若否,则进入子步骤1035。
[0161]
子步骤2035,终止天牛须搜索算法,并基于当前的天牛位置输出各判别参数的值。
[0162]
子步骤2036,将更新后的天牛的位置代入到适应度函数中,重复天牛须搜索算法。
[0163]
天牛步长step的更新公式为:
[0164]
step=step*eta;
[0165]
其中,eta表示天牛的步长调整比例,0<eta<1,例如eta取0.95。
[0166]
天牛须长p的更新公式为:
[0167]
p
m
=r*p
m
‑
1;
[0168]
其中,r表示天牛的须长衰减系数,m表示迭代次数。
[0169]
迭代次数的更新方式为m=m+1。
[0170]
在完成上述的天牛的步长、须长以及迭代次数的更新之后,判断本次迭代是否满足预设的迭代条件,迭代条件可以为天牛在当前位置的适应度是否满足预设的适应度阈值,和/或天牛的迭代次数m是否达到预设的迭代次数阈值,当本次迭代满足迭代条件时,终止本次的天牛须搜索算法,并将当前天牛的位置中的∈和k0的值输入到判别模型中,该判别模型便能够用于判别待监测系统的输出是否存在异常。当本次迭代不满足迭代条件时,将更新后的天牛的位置代入到适应度函数中,回到步骤203,重复上述过程,直至迭代至满足预设的迭代条件。
[0171]
请参考图5,为采用天牛须搜索算法对判别模型中的判别参数进行整定的示意图,由图5可见,天牛须搜索算法在迭代了32次后收敛,收敛速度快。
[0172]
以待监测系统为变压器系统为例,传感器测量的是变压器的输出电压,请参考图6,为在采用天牛须搜索算法在一次迭代过程中标注的异常数据点,黑色圆点为标注的异常
数据点,检出率100%,误检率0%,且所有异常数据点均能在异常开始时被标注出来。
[0173]
本实施例中,在构建待监测系统的测量模型时,使用了带滑窗线性递归估计求解回归模型中的测量参数,结合了待监测系统的历史参考数据与传感器精度,使得生成的测量模型更加符合待监测系统的实际运行状况,因此,在利用该测量模型对待监测系统进行异常监测时,能够得到更好更加准确的输出预测值,提升了待监测系统的数据预测的精度,并且该测量模型具有较好的鲁棒性。并且采用了递归估计求解测量参数,算力消耗小、速度快,适用于部署在算力较低的处理器芯片中,降低了成本。
[0174]
另外,本实施例中采用了天牛须搜索算法构建了待监测系统的判别模型,在优化过程中判别模型中待整定的判别参数较少,对算力要求较低,天牛须搜索算法的收敛速度快,适用于部署在算力较低的处理器芯片中,降低了成本,且精度较高;另外,无需长时间的学习过程,对前期数据积累需求较少,易于部署。
[0175]
本发明的第二实施例涉及一种系统监测方法,应用于处理器芯片,处理器芯片中部署了基于第一实施例中的系统监测模型方法所生成的测量模型以及判别模型。因此,处理器芯片能够运行本实施例中系统监测方法对待监测系统进行监控,包括:利用测量模型对待监测系统的输出进行预测,以及使用判别模型对测量模型的输出预测值进行异常监测。
[0176]
本实施例的系统监测方法具体流程如图7所示。
[0177]
步骤301,基于第一实施例中系统监测模型生成方法所生成的测量模型与待监测系统中传感器测量的输出测量值,预测待监测系统的输出预测值。
[0178]
步骤302,基于第一实施例中系统监测模型生成方法所生成的判别模型,确定输出预测值是否存在异常。
[0179]
步骤303,若确定输出预测值存在异常,发出警报。
[0180]
具体而言,处理器芯片基于待监测系统中的传感器测得的输出测量值,利用测量模型对输出测量值进行修正,得到待监测系统的输出预测值,再使用判别模型对测量模型所预测的输出预测值进行异常监测,若判定存在数据异常,则发出警报,并对异常数据点进行标记;发出警报的方式可以为:声音报警、文字报警提示等,以便于工作人员后续进行故障判断。
[0181]
本发明的第三实施例涉及一种处理器芯片,处理器芯片用于执行第一实施方式中的系统监测模型生成方法,和/或第二实施例中的系统监测方法;其中,待监测系统可以为工业系统,例如变压器系统、风电系统等;处理器芯片可以为mcu。
[0182]
本实施例中,可以由的单个处理器芯片同时生成待监测系统的测量模型和判别模型,并利用生成的测量模型和判别模型对待监测系统进行异常监测;或者,由两个处理器芯片分别执行生成待监测系统的测量模型和判别模型与利用生成的测量模型和判别模型对待监测系统进行异常监测。
[0183]
本发明第四实施例涉及一种工业系统,请参考图8,包括第三实施例中的处理器芯片1、连接于处理器芯片1的工业设备2以及传感器3,传感器3分别连接于处理器芯片1与工业设备2;工业设备例如为变压器系统、风电系统等。
[0184]
处理器芯片1中部署了基于第一实施例中的系统监测模型方法所生成的测量模型以及判别模型。
[0185]
处理器芯片1连接于传感器3,传感器3能够将测量的待监测系统的输出测量值发送到处理器芯片1,处理器芯片1则可以利用测量模型对输出测量值进行修正,得到待监测系统的输出预测值,再使用判别模型对测量模型所预测的输出预测值进行异常监测,若判定存在数据异常,则发出警报,并对异常数据点进行标记;发出警报的方式可以为:声音报警、文字报警提示等,以便于工作人员后续进行故障判断。
[0186]
以上已详细描述了本发明的较佳实施例,但应理解到,若需要,能修改实施例的方面来采用各种专利、申请和出版物的方面、特征和构思来提供另外的实施例。
[0187]
考虑到上文的详细描述,能对实施例做出这些和其它变化。一般而言,在权利要求中,所用的术语不应被认为限制在说明书和权利要求中公开的具体实施例,而是应被理解为包括所有可能的实施例连同这些权利要求所享有的全部等同范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1