基于LMI的仿生扑翼飞行器H∞鲁棒控制方法及系统
基于lmi的仿生扑翼飞行器h
∞
鲁棒控制方法及系统
技术领域
1.本发明涉及仿生扑翼飞行器技术领域,具体地,涉及基于lmi的仿生扑翼飞行器h∞鲁棒控制方法及系统。
背景技术:
2.仿生扑翼飞行器仿照自然界的昆虫,灵活机动,但具有纵向稳定性差的特点,而目前的控制机构所产生的控制量小,且执行机构具有不确定性,在某些频率下甚至超过100%;仿昆虫扑翼飞行器由翅膀拍打产生的寄生结构振动会产生噪声,且噪声与拍打频率相近,远小于旋翼飞行器由电机旋转带来的噪声频率,进一步增加控制难度。
3.专利文献cn112173101a(申请号:202011223949.x)公开了一种基于clap
‑
fling机制的可悬停的双扑翼飞行器,进一步提高扑翼微型飞行器的扑动效率,更好的利用昆虫高升力机理中的clap
‑
fling机制,设计了一种曲柄滑块机构,并基于该机构对微型扑翼飞行器进行了整体设计。本发明飞行器由一对曲柄滑块扑翼机构组成,对称分布在主机架两侧。单侧曲柄滑块扑翼机构由机架、减速齿轮组、曲柄、连杆、滑块与摇杆组成。与现有技术相比使用曲柄滑块机构进行设计,传动时动力大、效率高,机构可靠性高,在一个扑动周期内,能够完成四次完整的clap
‑
fling机制,使其获得更大的升力,提高飞行效率;且整体结构紧凑、体积小巧、重量轻便,以实现垂直起降、空中悬停、俯仰、偏航、滚转、倒飞等多种飞行运动。
4.目前仿生扑翼飞行器纵向控制可通过改变结构的方式诸如增大翅膀面积增加稳定性,增大翅膀中心与重心之间的距离(卡耐基梅隆大学的hines l,colmenares d等)、加竖直尾翼增大阻尼面等方式,在控制方案上还未有可实行的合适的方案。线性二次调节控制、自适应控制等传统的控制方法在建模不准确和系统有扰动的情况下的跟踪性能和稳定性均不理想,特别是目前扑翼产生的瞬时升力具有高频谐波分量,因此实际控制过程控制精度较差。且目前的扑翼飞行器由于制造误差带来的机体之间的差异,会增强模型的不确定性,因此有必要开展鲁棒性强的控制器。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是提供一种基于lmi的仿生扑翼飞行器h∞鲁棒控制方法及系统。
6.根据本发明提供的一种基于lmi的仿生扑翼飞行器h∞鲁棒控制方法,包括:
7.步骤s1:建立仿生扑翼飞行器时变的纵向动力学模型;
8.步骤s2:对仿生扑翼飞行器的气动力和力矩进行周期平均化,得到非线性仿生扑翼飞行器纵向定常模型;
9.步骤s3:将非线性纵向动力学定常模型在平衡点线性化得到线性标称模型;
10.步骤s4:根据实际控制过程对仿生扑翼飞行器的噪声、误差和执行机构动态特性进行建模,并根据噪声的幅值和频率特征、误差的幅值衰减增益和频率特征以及执行机构
动态特征的频率特征设计权函数;
11.步骤s5:根据线性标称模型和权函数得到被控对象广义状态空间模型,将仿生扑翼飞行器闭环系统转化成h∞控制器求解的标准形式;
12.步骤s6:基于lmi方法通过求解线性矩阵不等式得到满足鲁棒稳定性和鲁棒性能的控制器。
13.优选地,所述仿生扑翼飞行器纵向动力学模型采用飞行器6dof模型经过横纵向解耦得到;
14.所述6dof模型采用以t为周期变化的气动力f
b
和力矩m
b
作为输入,机体位移、速度、角速度以及欧拉角作为状态;
[0015][0016]
其中,p表示惯性坐标系下机体位置;v表示惯性坐标系下机体速度;m表示机体质量,v
b
表示体坐标系x
b
y
b
z
b
下机体速度;w
b
表示表示体坐标系x
b
y
b
z
b
下机体角速度;θ表示欧拉角;r(θ)表示旋转矩阵;j表示惯量矩阵;f
b
表示体坐标系下x
b
y
b
z
b
的气动力;m
b
表示体坐标系x
b
y
b
z
b
下三轴力矩;
[0017]
所述体坐标系采用当姿态角为0时x
b
轴为水平指向机体前方,z
b
指向机体正下方,y
b
用右手坐标系确定,指向机体正右侧;
[0018]
所述纵向动力学模型采用:
[0019][0020]
其中,u表示机身沿x
b
轴方向的速度,表示飞行器x
b
轴方向加速度,w表示飞行器z
b
方向的速度,表示飞行器z
b
轴方向加速度,θ表示机体俯仰角,绕y
b
轴的旋转角度,表示机身俯仰角速率,q表示机身俯仰角速率,表示机身俯仰角加速度,g表示重力加速度;m表示机体质量;x表示x
b
方向的以t为周期变化的气动力,z表示z
b
方向的以t为周期变化的气动力,m表示以t为周期变化的绕y
b
轴的机体俯仰力矩,i
y
表示机身绕y
b
轴转动惯量。
[0021]
优选地,所述步骤s2采用:
[0022]
对于一个非自治的动态系统其中,ε表示一个数值达到预设要求的标量;t表示时间;x表示飞行器状态变量;当γ
b
是以t为周期变化的函数,且ε满足预设要求时,则平均化的动态系统表示为时不变的动态系统,记为时,则平均化的动态系统表示为时不变的动态系统,记为
[0023]
其中,x为飞行器状态变量x=[u w q θ]
t
,为周期t内状态量的平均值,由于实际
飞行过程中翅膀拍打频率为飞行器自然频率n倍,因此
[0024]
对气动力x,z和气动力矩m周期平均化后得到非线性仿生扑翼飞行器纵向定常模型:
[0025][0026]
其中,
[0027]
优选地,在所述步骤s3中:
[0028]
在悬停平衡点θ
e
=u
e
=q
e
=z
e
=0;进行小扰动线性化,得到时不变状态转移方程:
[0029][0030]
其中,为气动导数;为气动导数;其中δu表示飞行器x
b
轴方向速度相对于飞行器平衡点x
b
轴方向速度的变化量;δw表示飞行器z
b
方向速度的变化量相对于飞行器平衡点z
b
轴方向速度的变化量;δq表示机身俯仰角速度相对于平衡点角速度的变化量;δθ表示机身俯仰角速度相对于平衡点角速度的变化量;
[0031]
由于选取的悬停平衡点处θ
e
=u
e
=q
e
=w
e
=0,有δu=u,δw=w,δq=q,δθ=θ,因此状态转移矩阵简写为:
[0032][0033]
其中,b为输入矩阵;控制量δ
s
表示控制俯仰运动的舵机的角度,控制量δ
th
表示油
门量,测量量为[u w q θ]
t
,输出方程为其中输出矩阵直接传递矩阵d=0,y=[u w q θ]
t
;
[0034]
忽略翅膀拍打过程中翅膀旋转环流作用,则都约等于0,线性标称模型的状态转移矩阵为:
[0035]
优选地,在所述步骤s4中,根据实际控制过程对仿生扑翼飞行器的噪声进行建模,根据噪声的幅值和频率特征设计权函数;
[0036]
仿生飞行器翅膀拍打频率引入的噪声为:
[0037]
n=[n
u n
w n
q n
θ
]
t
,设|n
u
|≤n
umax
,|n
w
|≤n
wmax
,|n
q
|≤n
qmax
,|n
θ
|≤n
θmax
,n
u
表示状
[0038]
态变量u测量值的噪声;n
w
表示状态变量w测量值的噪声;n
q
表示状态变量q测量值的噪声;n
θ
表示状态变量θ测量值的噪声;n
umax
表示噪声n
u
的幅值;n
wmax
表示噪声n
w
的幅值;n
qmax
表示噪声n
q
的幅值;n
θmax
表示噪声n
θ
的幅值;
[0039]
设n
q
的起始频率为n
θ
的起始频率为为消除由翅膀拍打引起的大于和的高频段噪声,传感器噪声权重矩阵w
n
幅值取噪声幅值和频率特性的倒数:
[0040][0041]
其中,s为拉普拉斯算子;n
θ
表示θ测量值的噪声;n
u
表示u测量值的噪声;n
w
表示w测量值的噪声;n
q
表示q测量值的噪声;diag表示对角阵。
[0042]
优选地,在所述步骤s4中,根据实际控制过程对仿生扑翼飞行器的误差进行建模,根据误差的幅值衰减增益和频率特征设计权函数;
[0043]
由于给定信号为低频信号,因此低频误差信号需衰减快速,设姿态误差记低频误差幅值衰减比例为截止频率为θ
ideal
表示俯仰角的理想角度,θ表示俯仰角实际值,取误差信号频响特性的倒数使得姿态误差控制函数
[0044]
其中,θ表示俯仰角度,s表示拉普拉斯算子,j表示虚数,表示姿态误差控制权函数。
[0045]
优选地,在所述步骤s4中,根据实际控制过程中仿生扑翼飞行器的执行机构动态特性进行建模,根据执行机构动态特性频率特征设计权函数;
[0046]
对实际控制过程对仿生扑翼飞行器的油门和舵机进行偏转幅度和速率限制;对执
行器一阶惯性模型建模,行器一阶惯性模型建模,写成状态空间模型为:
[0047][0048]
其中对δ
th
,δ
s
,实际输出值进行限幅,实际过程中油门量不超过100%,油门变化率不超过舵机角度不超过δ
smax
,舵机角度变化率不超过则输出误差
[0049]
其中,控制量评价权函数
[0050]
其中,s表示拉普拉斯算子,δ
th
表示油门,表示油门的给定值,k
act1
表示δ
thcmd
到δ
th
的传递函数的增益,t
act1
表示δ
thcmd
到δ
th
一阶惯性环节的时间常数,表示油门量速率;δ
s
表示执行器舵机的动作角度,表示舵机的给定值,k
act2
表示δ
scmd
到δ
s
的传递函数的增益,t
act2
表示δ
scmd
到δ
s
一阶惯性环节的时间常数,表示舵机动作角速率;,表示油门变化率的最大值,表示执行器舵机动作角度最大值;表示执行器舵机动作角速度最大值;
[0051]
根据实际控制过程对仿生扑翼飞行器遥控遥杆到机体俯仰角度为二阶模型
[0052]
其中,表示遥控遥杆到机体俯仰角度的传递函数,表示二阶系统阻尼,s表示拉普拉斯算子,θ
cmd
表示遥杆角度;θ
ideal
表示俯仰角的理想角度。
[0053]
优选地,在所述步骤s5中:输入参考姿态角θ
cmd
一路进入控制器k,一路进入一路进入控制器k,一路进入的输出为θ
ideal
,θ
ideal
与实际俯仰角θ的差进入得到姿态误差噪声n经过噪声权函数w
n
之后与被控对象输出[u w q θ]
t
相加后得到测量值进入控制器k;控制器的输出[δ
thcmd δ
scmd
]
t
经过w
act
得到进入w
u
得到同时也作为被控对象的输入得到输出[u w q θ]
t
,得到互连框图之后,应用matlab的工具包robust control tool box得到广义被控对象p
generalized_plant
,用于求解标准h∞控制问题。
[0054]
优选地,在所述步骤s6中将不确定线性闭环系统的鲁棒h∞问题转化求解lmi问题;被控对象广义状态空间模型为:
[0055][0056]
其中,
[0057]
其中,a
gen
,为将p
generalized_plant
分块后的系数矩阵,表示外部输入表示被控输出误差表示控制器的输出;x表示系统状态x=[u w q θ]
t
,y表示可测量输出;d表示外部扰动,噪声n=[n
u n
w n
q n
θ
]
t
;
[0058]
闭环系统的鲁棒h∞问题描述为:设计出状态反馈控制器u=kx使得闭环系统满足:闭环系统稳定以及闭环系统的h∞范数小于常数γ;
[0059]
定义lyapunov函数为:v=x
t
px,其中,p为正定矩阵;满足(1)闭环系统稳定;需dv/dt<0;满足(2)闭环系统的h∞范数小于γ,需综合(1)(2)得
[0060]
闭环系统状态空间方程为
[0061]
根据有界实引理和schur complement定理,将控制器综合问题转化为在线性矩阵不等式约束下的可行解;
[0062]
[0063]
状态反馈控制器为k=y*x
‑1,其中x=p
‑1,y=kp
‑1;i表示单位矩阵;
[0064]
如果无可行解,则重新调整姿态误差权函数控制量评价权函数w
u
和噪声控制权函数w
n
直至满足条件为止,实际实施过程中根据所得的h∞控制器,利用拟合或平衡降阶法对所得控制器进行降阶。
[0065]
根据本发明提供的一种基于lmi的仿生扑翼飞行器h∞鲁棒控制系统,包括:
[0066]
模块m1:建立仿生扑翼飞行器时变的纵向动力学模型;
[0067]
模块m2:对仿生扑翼飞行器的气动力和力矩进行周期平均化,得到非线性仿生扑翼飞行器纵向定常模型;
[0068]
模块m3:将非线性纵向动力学定常模型在平衡点线性化得到线性标称模型;
[0069]
模块m4:根据实际控制过程对仿生扑翼飞行器的噪声、误差和执行机构动态特性进行建模,并根据噪声的幅值和频率特征、误差的幅值衰减增益和频率特征以及执行机构动态特征的频率特征设计权函数;
[0070]
模块m5:根据线性标称模型和权函数得到被控对象广义状态空间模型,将仿生扑翼飞行器闭环系统转化成h∞控制器求解的标准形式;
[0071]
模块m6:基于lmi方法通过求解线性矩阵不等式得到满足鲁棒稳定性和鲁棒性能的控制器。
[0072]
与现有技术相比,本发明具有如下的有益效果:
[0073]
1、本发明将仿生扑翼飞行器化为一个广泛的h∞控制框架,通过解决多个线性矩阵不等式得到具有高鲁棒性的控制器,实现了存在参数不确定和噪声扰动时系统纵向控制;
[0074]
2、本发明对于飞行轨迹时变的飞行器系统,所设计的鲁棒控制率是时变的且具有自主调节能力。
附图说明
[0075]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
[0076]
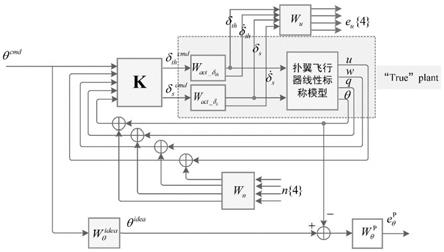
图1为本发明一种基于lmi的仿生扑翼飞行器h∞鲁棒控制互连框图。
[0077]
图2为本发明一种基于lmi的仿生扑翼飞行器h∞鲁棒控制结构图。
[0078]
图3为本发明一种基于lmi的仿生扑翼飞行器h∞鲁棒控制俯仰角度跟踪效果图。
[0079]
图4为本发明一种基于lmi的仿生扑翼飞行器h∞鲁棒控制俯仰角速率响应示意图。
[0080]
图5为本发明一种基于lmi的仿生扑翼飞行器h∞鲁棒控制x、z轴位移响应示意图。
[0081]
图6为本发明一种基于lmi的仿生扑翼飞行器h∞鲁棒控制执行器响应示意图。
具体实施方式
[0082]
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
[0083]
实施例1
[0084]
针对仿生扑翼飞行器目前纵向稳定性差、易受扰动影响的问题,本发明针对具有不确定参数和外部扰动飞行器模型,定量描述噪声、扰动以及执行机构不确定性,设计一种基于lmi的仿生扑翼飞行器h∞鲁棒控制,最终控制系统能够实现消除跟随误差、抵抗扰动和噪声的影响。
[0085]
根据本发明提供的一种基于lmi的仿生扑翼飞行器h∞鲁棒控制方法,包括:
[0086]
步骤s1:建立仿生扑翼飞行器时变的纵向动力学模型;
[0087]
步骤s2:对仿生扑翼飞行器的气动力和力矩进行周期平均化,得到非线性仿生扑翼飞行器纵向定常模型;
[0088]
步骤s3:将非线性纵向动力学定常模型在平衡点线性化,得到线性标称模型的状态方程和输出方程;
[0089]
步骤s4:根据实际控制过程对仿生扑翼飞行器的噪声、误差和执行机构动态特性进行建模,给出相应权函数的设计方法;
[0090]
步骤s5:结合权函数和线性标称模型得到被控对象广义状态空间模型,将原控制问题转化成标准h∞问题;
[0091]
步骤s6:基于lmi(linear matrix inequality)方法,通过求解线性矩阵不等式得到满足鲁棒稳定性和鲁棒性能的控制器。
[0092]
具体地,所述仿生扑翼飞行器纵向动力学模型由飞行器6dof模型经过横纵向解耦得到。所述6dof以t为周期变化的气动力f
b
和力矩m
b
作为输入,机体位移、速度、角速度以及欧拉角为状态:
[0093][0094]
其中,m表示机体质量,p为惯性坐标系下机体位置,v为惯性坐标系下机体速度,v
b
=[u,v,w]
t
为体坐标系x
b
y
b
z
b
下机体速度,w
b
=[p,q,r]
t
为体坐标系x
b
y
b
z
b
下机体角速度,θ=[φ,θ,ψ]
t
为欧拉角,r(θ)表示旋转矩阵,j为机体惯量矩阵,f
b
=[x,y,z]
t
为体坐标系下x
b
y
b
z
b
的气动力,m
b
=[l,m,n]
t
为体坐标系x
b
y
b
z
b
下三轴力矩。体坐标系的定义为,当姿态角为0时x
b
轴为水平指向机体前方,z
b
指向机体正下方,y
b
由右手坐标系确定,指向机体正右侧。
[0095]
解耦后得到时变的纵向动力学模型,表示为:
[0096][0097]
其中,u表示机身沿x
b
轴方向的速度,表示飞行器x
b
轴方向加速度,w表示飞行器z
b
方向的速度,表示飞行器z
b
轴方向加速度,θ表示机体俯仰角,即绕y
b
轴的旋转角度,表示
机身俯仰角速度,q表示机身俯仰角速度,表示机身俯仰角加速度,g表示重力加速度,m表示机体质量。x表示x
b
方向的以t为周期变化的气动力,z表示z
b
方向的以t为周期变化的气动力,m表示以t为周期变化的绕y
b
轴的机体俯仰力矩,i
y
表示机身y
b
轴转动惯量。
[0098]
具体地,所述步骤s2中:
[0099]
对于一个非自治的动态系统其中t表示时间,其中ε表示一个数值很小的标量。如果γ
b
是以t为周期变化的函数,且ε足够小,则此平均化的动态系统可以写为时不变的系统,记为x为飞行器状态变量x=[u w q θ]
t
,为周期t内状态量的平均值,由于实际飞行过程中翅膀拍打频率远大于飞行器自然频率,例如:实际飞行过程中翅膀拍打频率为飞行器自然频率25倍;因此
[0100]
对气动力x,z和气动力矩m周期平均化后得到时不变的非线性纵向模型为:
[0101][0102]
其中
[0103]
具体地,在所述步骤s3中:
[0104]
在悬停平衡点θ
e
=u
e
=q
e
=w
e
=0;进行小扰动线性化,得到时不变状态转移方程:
[0105][0106]
其中,为气动导数,为气动导数,其中δu表示飞行器x
b
轴方向速度相对于飞行器平衡点x
b
轴方向速度的变化量;δw表示飞行器z
b
方向速度的变化量相对于飞行器平衡点z
b
轴方向速度的变化量;δq表示机身俯仰角速度相对于平衡点角速度的变化量;δθ表示机身俯仰角速度相对于平衡点角速度的变化量;由于选取的悬停平衡点处θ
e
=u
e
=q
e
=w
e
=0,有δu=u,δw=w,δq=q,δ
θ=θ,因此状态转移矩阵可简写b为输入矩阵,控制量δ
s
表示控制俯仰运动的舵机的角度,控制量δ
th
表示油门量,测量量为[u w q θ]
t
,输出方程为其中输出矩阵直接传递矩阵d=0,y=[u w q θ]
t
;
[0107]
忽略翅膀拍打过程中翅膀旋转环流作用,则都约等于0,线性标称模型的状态转移矩阵为:
[0108]
具体地,在所述步骤s4中,根据实际控制过程对仿生扑翼飞行器的噪声进行建模,根据噪声的幅值和频率特征设计权函数。
[0109]
考虑仿生飞行器翅膀拍打频率引入的噪声n=[n
u n
w n
q n
θ
]
t
,设|n
u
|≤n
umax
,|n
w
|≤n
wmax
,|n
q
|≤n
qmax
,|n
θ
|≤n
θmax
,n
u
表示状态变量u测量值的噪声;n
w
表示状态变量w测量值的噪声;n
q
表示状态变量q测量值的噪声;n
θ
表示状态变量θ测量值的噪声。n
umax
表示噪声n
u
的幅值;n
wmax
表示噪声n
w
的幅值;n
qmax
表示噪声n
q
的幅值;n
θmax
表示噪声n
θ
的幅值。
[0110]
设n
q
的起始频率为n
θ
的起始频率为为消除由翅膀拍打引起的大于和的高频段噪声,传感器噪声权重矩阵w
n
幅值取噪声幅值和频率特性的倒数,
[0111]
其中s为拉普拉斯算子。diag表示对角阵。
[0112]
具体地,在所述步骤s4中,根据实际控制过程对仿生扑翼飞行器的误差进行建模,根据误差的幅值衰减增益和频率特征设计权函数。由于给定信号为低频信号,因此低频误差信号需衰减快速,设姿态误差记低频误差幅值衰减比例为截止频率为取误差信号频响特性的倒数使得姿态误差控制函数
[0113]
其中,θ表示俯仰角度,s表示拉普拉斯算子,j表示虚数,表示姿态误差控制函数。
[0114]
具体地,在所述步骤s4中,根据实际控制过程对仿生扑翼飞行器的执行机构动态特性进行建模,根据执行机构动态特性频率特征设计权函数。对实际控制过程对仿生扑翼
飞行器的油门和舵机进行偏转幅度和速率限制。对执行器一阶惯性模型建模,写成状态空间模型为其中对δ
th
,δ
s
,实际输出值进行限幅,实际过程中油门量不可超过100%,油门变化率不超过舵机角度不超过δ
smax
,舵机角度变化率不超过则系统输出误差控制量评价权函数其中,s表示拉普拉斯算子,δ
th
表示油门,表示油门的给定值,k
act1
表示δ
thcmd
到δ
th
的传递函数的增益,t
act1
表示δ
thcmd
到δ
th
一阶惯性环节的时间常数,表示油门量速率;δ
s
表示执行器舵机的动作角度,表示舵机的给定值,k
act2
表示δ
scmd
到δ
s
的传递函数的增益,t
act2
表示δ
scmd
到δ
s
一阶惯性环节的时间常数,表示舵机动作角速率。
[0115]
根据实际控制过程对仿生扑翼飞行器遥控遥杆到机体俯仰角度建立二阶模型
[0116]
其中,表示遥控遥杆到机体俯仰角度的传递函数,表示二阶系统阻尼,s表示拉普拉斯算子,θ
cmd
表示遥杆角度。θ
ideal
表示俯仰角的理想角度。
[0117]
具体地,在所述步骤s5中结合权函数和线性标称模型得到广义被控对象状态空间模型。输入参考姿态角θ
cmd
一路进入控制器k,一路进入的输出为θ
ideal
,θ
ideal
与实际俯仰角θ的差进入得到姿态误差噪声n经过噪声权函数w
n
之后与被控对象输出[u w q θ]
t
相加后得到测量值进入控制器k;控制器的输出[δ
thcmd δ
scmd
]
t
经过w
act
得到进入w
u
得到同时也作为被控对象的实际输入得到输出[u w q θ]
t
。得到系统互连框图之后,应用matlab的工具包robust control tool box可以得到广义被控对象p
generalized_plant
,
用于求解标准h∞控制问题。
[0118]
具体地,在所述步骤s6中将不确定线性闭环系统的鲁棒h∞问题转化求解lmi问题。被控对象广义状态空间模型为:
[0119][0120]
其中,记即其中表示外部输入表示被控输出误差表示控制器的输出,x表示系统状态x=[u w q θ]
t
,y表示可测量输出。d表示外部扰动,系统噪声n=[n
u n
w n
q n
θ
]
t
。
[0121]
不确定线性闭环系统的鲁棒h∞问题描述为:设计出状态反馈控制器u=kx使得系统满足:(1)闭环系统稳定;(2)闭环系统的h∞范数小于常数γ,其中γ为标量,反映了闭环系统对干扰噪声的抑制作用,数值越小表明对噪声和干扰的抑制能力越强。
[0122]
定义lyapunov函数为:v=x
t
px,其中p为正定矩阵。满足(1)闭环系统稳定;需dv/dt<0;满足(2)闭环系统的h∞范数小于γ,需综合(1)(2)得
[0123]
闭环系统状态空间方程为
[0124]
根据有界实引理和schur complement定理,将控制器综合问题可以转化为在线性矩阵不等式约束下的可行解。
[0125][0126]
状态反馈控制器为k=y*x
‑1,其中x=p
‑1,y=kp
‑1。
[0127]
如果无可行解,则重新调整姿态误差权函数控制量评价权函数w
u
和噪声控制权函数w
n
直至满足条件为止,实际实施过程中根据所得的h∞控制器,利用拟合或平衡降阶法对所得控制器进行降阶。
[0128]
根据本发明提供的一种基于lmi的仿生扑翼飞行器h∞鲁棒控制系统,包括:
[0129]
模块m1:建立仿生扑翼飞行器时变的纵向动力学模型;
[0130]
模块m2:对仿生扑翼飞行器的气动力和力矩进行周期平均化,得到非线性仿生扑翼飞行器纵向定常模型;
[0131]
模块m3:将非线性纵向动力学定常模型在平衡点线性化,得到线性标称模型的状
态方程和输出方程;
[0132]
模块m4:根据实际控制过程对仿生扑翼飞行器的噪声、误差和执行机构动态特性进行建模,给出相应权函数的设计方法;
[0133]
模块m5:结合权函数和线性标称模型得到被控对象广义状态空间模型,将原控制问题转化成标准h∞问题;
[0134]
模块m6:基于lmi(linear matrix inequality)方法,通过求解线性矩阵不等式得到满足鲁棒稳定性和鲁棒性能的控制器。
[0135]
具体地,所述仿生扑翼飞行器纵向动力学模型由飞行器6dof模型经过横纵向解耦得到。所述6dof以t为周期变化的气动力f
b
和力矩m
b
作为输入,机体位移、速度、角速度以及欧拉角为状态:
[0136][0137]
其中,m表示机体质量,p为惯性坐标系下机体位置,v为惯性坐标系下机体速度,v
b
=[u,v,w]
t
为体坐标系x
b
y
b
z
b
下机体速度,w
b
=[p,q,r]
t
为体坐标系x
b
y
b
z
b
下机体角速度,θ=[φ,θ,ψ]
t
为欧拉角,r(θ)表示旋转矩阵,j为机体惯量矩阵,f
b
=[x,y,z]
t
为体坐标系下x
b
y
b
z
b
的气动力,m
b
=[l,m,n]
t
为体坐标系x
b
y
b
z
b
下三轴力矩。体坐标系的定义为,当姿态角为0时x
b
轴为水平指向机体前方,z
b
指向机体正下方,y
b
由右手坐标系确定,指向机体正右侧。
[0138]
解耦后得到时变的纵向动力学模型,表示为:
[0139][0140]
其中,u表示机身沿x
b
轴方向的速度,表示飞行器x
b
轴方向加速度,w表示飞行器z
b
方向的速度,表示飞行器z
b
轴方向加速度,θ表示机体俯仰角,即绕y
b
轴的旋转角度,表示机身俯仰角速度,q表示机身俯仰角速度,表示机身俯仰角加速度,g表示重力加速度,m表示机体质量。x表示x
b
方向的以t为周期变化的气动力,z表示z
b
方向的以t为周期变化的气动力,m表示以t为周期变化的绕y
b
轴的机体俯仰力矩,i
y
表示机身y
b
轴转动惯量。
[0141]
具体地,所述模块m2中:
[0142]
对于一个非自治的动态系统其中t表示时间,其中ε表示一个数值很小的标量。如果γ
b
是以t为周期变化的函数,且ε足够小,则此平均化的动态系统可以写为时不变的系统,记为x为飞行器状态变量x=[u w q θ]
t
,为周期t内状态量的平均值,由于实际飞行过程中翅膀拍打频率远大于飞行器自然频率,例如:实际飞行过程中翅膀拍打频率为飞行器自然频率25倍;因此
[0143]
对气动力x,z和气动力矩m周期平均化后得到时不变的非线性纵向模型为:
[0144][0145]
其中
[0146]
具体地,在所述模块m3中:
[0147]
在悬停平衡点θ
e
=u
e
=q
e
=w
e
=0;进行小扰动线性化,得到时不变状态转移方程:
[0148][0149]
其中,为气动导数,为气动导数,其中δu表示飞行器x
b
轴方向速度相对于飞行器平衡点x
b
轴方向速度的变化量;δw表示飞行器z
b
方向速度的变化量相对于飞行器平衡点z
b
轴方向速度的变化量;δq表示机身俯仰角速度相对于平衡点角速度的变化量;δθ表示机身俯仰角速度相对于平衡点角速度的变化量;由于选取的悬停平衡点处θ
e
=u
e
=q
e
=w
e
=0,有δu=u,δw=w,δq=q,δθ=θ,因此状态转移矩阵可简写b为输入矩阵,控制量δ
s
表示控制俯仰运动的舵机的角度,控制量δ
th
表示油门量,测量量为[u w q θ]
t
,输出方程为其中输出矩阵直接传递矩阵d=0,y=[u w q θ]
t
;
[0150]
忽略翅膀拍打过程中翅膀旋转环流作用,则都约等于0,线性标称模型的状态转移矩阵为:
[0151]
具体地,在所述模块m4中,根据实际控制过程对仿生扑翼飞行器的噪声进行建模,根据噪声的幅值和频率特征设计权函数。
[0152]
考虑仿生飞行器翅膀拍打频率引入的噪声n=[n
u n
w n
q n
θ
]
t
,设|n
u
|≤n
umax
,|n
w
|≤n
wmax
,|n
q
|≤n
qmax
,|n
θ
|≤n
θmax
,n
u
表示状态变量u测量值的噪声;n
w
表示状态变量w测量值的噪声;n
q
表示状态变量q测量值的噪声;n
θ
表示状态变量θ测量值的噪声。n
umax
表示噪声n
u
的幅值;n
wmax
表示噪声n
w
的幅值;n
qmax
表示噪声n
q
的幅值;n
θmax
表示噪声n
θ
的幅值。
[0153]
设n
q
的起始频率为n
θ
的起始频率为为消除由翅膀拍打引起的大于和的高频段噪声,传感器噪声权重矩阵w
n
幅值取噪声幅值和频率特性的倒数,
[0154]
其中s为拉普拉斯算子。diag表示对角阵。
[0155]
具体地,在所述模块m4中,根据实际控制过程对仿生扑翼飞行器的误差进行建模,根据误差的幅值衰减增益和频率特征设计权函数。由于给定信号为低频信号,因此低频误差信号需衰减快速,设姿态误差记低频误差幅值衰减比例为截止频率为取误差信号频响特性的倒数使得姿态误差控制函数
[0156]
其中,θ表示俯仰角度,s表示拉普拉斯算子,j表示虚数,表示姿态误差控制函数。
[0157]
具体地,在所述模块m4中,根据实际控制过程对仿生扑翼飞行器的执行机构动态特性进行建模,根据执行机构动态特性频率特征设计权函数。对实际控制过程对仿生扑翼飞行器的油门和舵机进行偏转幅度和速率限制。对执行器一阶惯性模型建模,写成状态空间模型为其中对δ
th
,
δ
s
,实际输出值进行限幅,实际过程中油门量不可超过100%,油门变化率不超过舵机角度不超过δ
smax
,舵机角度变化率不超过则系统输出误差控制量评价权函数其中,s表示拉普拉斯算子,δ
th
表示油门,表示油门的给定值,k
act1
表示δ
thcmd
到δ
th
的传递函数的增益,t
act1
表示δ
thcmd
到δ
th
一阶惯性环节的时间常数,表示油门量速率;δ
s
表示执行器舵机的动作角度,表示舵机的给定值,k
act2
表示δ
scmd
到δ
s
的传递函数的增益,t
act2
表示δ
scmd
到δ
s
一阶惯性环节的时间常数,表示舵机动作角速率。
[0158]
根据实际控制过程对仿生扑翼飞行器遥控遥杆到机体俯仰角度建立二阶模型
[0159]
其中,表示遥控遥杆到机体俯仰角度的传递函数,表示二阶系统阻尼,s表示拉普拉斯算子,θ
cmd
表示遥杆角度。θ
ideal
表示俯仰角的理想角度。
[0160]
具体地,在所述模块m5中结合权函数和线性标称模型得到广义被控对象状态空间模型。输入参考姿态角θ
cmd
一路进入控制器k,一路进入的输出为θ
ideal
,θ
ideal
与实际俯仰角θ的差进入得到姿态误差噪声n经过噪声权函数w
n
之后与被控对象输出[u w q θ]
t
相加后得到测量值进入控制器k;控制器的输出[δ
thcmd δ
scmd
]
t
经过w
act
得到进入w
u
得到同时也作为被控对象的实际输入得到输出[u w q θ]
t
。得到系统互连框图之后,应用matlab的工具包robust control tool box可以得到广义被控对象p
generalized_plant
,用于求解标准h∞控制问题。
[0161]
具体地,在所述模块m6中将不确定线性闭环系统的鲁棒h∞问题转化求解lmi问题。被控对象广义状态空间模型为:
[0162][0163]
其中,记即其中表示外部输入表示被控输出误差表示
控制器的输出,x表示系统状态x=[u w q θ]
t
,y表示可测量输出。d表示外部扰动,系统噪声n=[n
u n
w n
q n
θ
]
t
。
[0164]
不确定线性闭环系统的鲁棒h∞问题描述为:设计出状态反馈控制器u=kx使得系统满足:(1)闭环系统稳定;(2)闭环系统的h∞范数小于常数γ,其中γ为标量,反映了闭环系统对干扰噪声的抑制作用,数值越小表明对噪声和干扰的抑制能力越强。
[0165]
定义lyapunov函数为:v=x
t
px,其中p为正定矩阵。满足(1)闭环系统稳定;需dv/dt<0;满足(2)闭环系统的h∞范数小于γ,需综合(1)(2)得
[0166]
闭环系统状态空间方程为
[0167]
根据有界实引理和schur complement定理,将控制器综合问题可以转化为在线性矩阵不等式约束下的可行解。
[0168][0169]
状态反馈控制器为k=y*x
‑1,其中x=p
‑1,y=kp
‑1。
[0170]
如果无可行解,则重新调整姿态误差权函数控制量评价权函数w
u
和噪声控制权函数w
n
直至满足条件为止,实际实施过程中根据所得的h∞控制器,利用拟合或平衡降阶法对所得控制器进行降阶。
[0171]
实施例2
[0172]
实施例2是实施例1的优选例
[0173]
根据本发明提供的基于lmi的仿生扑翼飞行器h∞鲁棒控制方法,如图1至6所示,包括:
[0174]
根据平均理论得到定常的飞行器纵向线性模型。利用飞行器悬飞稳态平衡工作点对该系统逐个输入变量参数施加小扰动,得到小扰动方程形式为:
[0175]
忽略翅膀拍打过程中旋转环流作用,则约等于0,纵向标称模型的状态转移方程可简写其中b为控制矩阵,控制量为控制俯
仰运动的直线舵机偏转角度δ
s
和油门量δ
th
。测量量为[u w q θ]
t
,输出方程为其中输出矩阵直接传递矩阵d=0,y=[u w q θ]
t
。
[0176]
计算方法和系统辨识相结合得到状态方程。有计算方法和系统辨识相结合得到状态方程。有其中全状态均可测量,因此输出矩阵和直接传递矩阵c
iden
=1,d
iden
=0,将矩阵中参数的描述表达为最小二乘问题:
[0177]
即其中x
k+1
表示在小扰动下k次采样得到的输出序列,φ
k
为k次采样的状态和输入序,为未知参数矩阵a
iden
,b
iden
的组合应用最小二乘解法对进行拟合求解,其表达式为由于为未知参数矩阵a
iden
,b
iden
的组合,求解即得到参数矩阵a
iden
,b
iden
的值,进而得到完整的仿生扑翼飞行器悬停处的线性状态空间模型。其中a
iden
,b
iden
为辨识得到的状态转移矩阵和输入矩阵。
[0178]
执行器偏转幅度和速率限制
[0179]
传感器噪声权函数控制量评价权函数为根据实际控制过程对仿生扑翼飞行器遥控遥杆到机体俯仰角度为二阶模型俯仰角度为二阶模型姿态控制误差权函数为
[0180]
基于lmi的仿生扑翼飞行器h∞鲁棒控制方法,结合权函数和线性标称模型得到广义被控对象状态空间模型。输入参考姿态角θ
cmd
一路进入控制器k,一路进入的输出为θ
ideal
,θ
ideal
与实际俯仰角θ的差进入得到姿态误差噪声n经过噪声权函数w
n
之后与被控对象输出[u w q θ]
t
相加后得到测量值进入控制器k;控制器的输出[δ
thcmd δ
scmd
]
t
经过w
act
得到进入w
u
得到同时也作为被控对象的输入得到输出[u w q θ]
t
。得到系统互连框图之后,应用matlab的工具包robust control tool box可以得到广义被控对象p
generalized_plant
(如图1所示),用于求解标准h∞控制问题。
[0181]
广义被控对象的状态空间形式为p
generalized_plant
,如图2所示。
[0182][0183]
记即其中表示外部输入表示被控输出误差表示控制输入,x表示系统状态x=[u w q θ]
t
,y表示可测量输出。d表示外部扰动,系统噪声n=[n
u n
w n
q n
θ
]
t
;a
gen
,为将p
generalized_plant
分块后的系数矩阵。
[0184]
不确定线性闭环系统的鲁棒h∞问题描述为:设计出状态反馈控制器u=kx使得系
统满足:(1)闭环系统稳定;(2)闭环系统的h∞范数小于常数γ。
[0185]
定义lyapunov函数为:v=x
t
px,其中p为正定矩阵。满足(1)闭环系统稳定;需dv/dt<0;满足(2)闭环系统的h∞范数小于γ,需综合(1)(2)得
[0186]
闭环系统状态空间方程为
[0187]
根据有界实引理和schur complement定理,将控制器综合问题可以转化为在线性矩阵不等式约束下的可行解。
[0188][0189]
状态反馈控制器为k=y*x
‑1,其中i表示单位矩阵,x=p
‑1,y=kp
‑1。
[0190]
如果无可行解,则重新调整姿态误差权函数w
u
、w
n
和直至满足条件为止。根据所得的h∞控制器,利用拟合或平衡降阶法对所得控制器进行降阶
[0191]
仿生扑翼飞行器的参数如表1所示,控制参数如表2所示。
[0192]
表1
[0193][0194]
表2
[0195][0196]
系统的无穷范数为γ=1.9,其值反映了系统对干扰噪声的抑制作用,数值越小表明对噪声和干扰的抑制能力越强。仿真时考虑测量噪声为幅值为1的白噪声信号,而外部干扰设定为z轴速度为幅值0.3的正弦一次谐波和三次谐波信号叠加。参考输入θ
cmd
为doublet时,俯仰角响应如图3所示,俯仰角速率响应如图4所示,执行器输出δ
th
,δ
s
和在幅值限制内。俯仰角无超调,稳态误差小于
±
1度。
[0197]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统、装置及其各个模块以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统、装置及其各个模块以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同程序。所以,本发明提供的系统、装置及其各个模块可以被认为是一种硬件部件,而对其内包括的用于实现各种程序的模块也可以视为硬件部件内的结构;也可以将用于实现各种功能的模块视为既可以是实现方法的软件程序又可以是硬件部件内的结构。
[0198]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1