一种智能远程操作及调度指挥系统的制作方法
1.本发明涉及港口自动化领域,尤其涉及一种智能远程操作及调度指挥系统。
背景技术:
2.近年来,随着港口业务量的不断提升,港口对于信息化以及智能化需求愈加强烈,激烈的市场竞争要求企业不断提升自身的综合竞争能力。在大环境的影响下,港口必须通过自动化、智能化的改造进一步提高核心竞争力,因此,如何将自动化、智能操作等创新技术有序的融合在一起来实现智慧港口建设是现在急需解决的难题。
技术实现要素:
3.本发明目的是针对上述问题,提供一种结构简单、操作便利的智能远程操作及调度指挥系统。
4.为了实现上述目的,本发明的技术方案是:
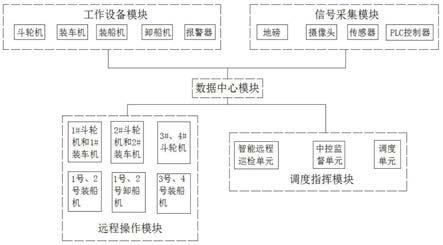
5.一种智能远程操作及调度指挥系统,包括用于对各个设备进行远程操作的远程操作模块,用于对各个设备进行巡检、调度的调度指挥模块,用于对数据进行处理、发送、接收、储存的数据中心模块,用于接收信号并执行的工作设备模块,用于采集信号并传输给数据中心模块的信号采集模块;所述远程操作模块、调度指挥模块的信号输出端均与数据中心模块的信号输入端双向连接,信号采集模块的信号输出端与数据中心模块的信号输入端相连接,数据中心模块的信号输出端与工作设备模块的信号输入端相连接。
6.进一步的,所述远程操作模块包括若干个斗轮机控制单元、若干个装车机控制单元、若干个装船机控制单元、若干个卸船机控制单元;所述斗轮机控制单元、装车机控制单元、装船机控制单元、卸船机控制单元的信号输出端均与数据中心模块的信号输入端相连接。
7.进一步的,所述调度指挥模块包括远程巡检单元、中控监督单元、调度单元;远程巡检单元、中控监督单元的信号输入端与数据中心模块的信号输出端相连接,调度单元的信号输出端与数据中心模块的信号输入端相连接。
8.进一步的,所述工作设备模块包括若干个斗轮机、若干个装车机、若干个装船机、若干个卸船机、报警器;所述斗轮机、装车机、装船机、卸船机、报警器的信号输入端均与数据中心模块的信号输出端相连接。
9.进一步的,所述信号采集模块包括地磅、摄像头、传感器、plc控制器,地磅、摄像头、传感器、plc控制器的信号输出端均与数据中心模块的信号输入端相连接。
10.进一步的,所述数据中心模块为服务器。
11.与现有技术相比,本发明具有的优点和积极效果是:
12.本发明通过设置远程操作模块对港口中的各个操作设备进行远程控制,同时通过调度指挥模块对各个操作设备的工作状况进行监测、调度,并且其可以通过信号采集模块对操作设备工作过程中的各种信号进行采集,方便了调度指挥模块监测工作的进行;其集
合了生产调度、智能巡检、设备远程智能操控、信息服务等功能,为智慧港口的后续智能化、自动化以及信息化项目建设奠定可靠的基础。
附图说明
13.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
14.图1为本发明的框架结构图。
具体实施方式
15.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
16.如图1所示,本实施例公开了一种智能远程操作及调度指挥系统,包括用于对各个设备进行远程操作的远程操作模块,用于对各个设备进行巡检、调度的调度指挥模块,用于对数据进行处理、发送、接收、储存的数据中心模块,用于接收信号并执行的工作设备模块,用于采集信号并传输给数据中心模块的信号采集模块;所述远程操作模块、调度指挥模块的信号输出端均与数据中心模块的信号输入端双向连接,信号采集模块的信号输出端与数据中心模块的信号输入端相连接,数据中心模块的信号输出端与工作设备模块的信号输入端相连接;所述数据中心模块为服务器。
17.所述远程操作模块包括若干个斗轮机控制单元、若干个装车机控制单元、若干个装船机控制单元、若干个卸船机控制单元;所述斗轮机控制单元、装车机控制单元、装船机控制单元、卸船机控制单元的信号输出端均与数据中心模块的信号输入端相连接。
18.所述调度指挥模块包括远程巡检单元、中控监督单元、调度单元;远程巡检单元、中控监督单元的信号输入端与数据中心模块的信号输出端相连接,调度单元的信号输出端与数据中心模块的信号输入端相连接。
19.所述工作设备模块包括若干个斗轮机、若干个装车机、若干个装船机、若干个卸船机、报警器;所述斗轮机、装车机、装船机、卸船机、报警器的信号输入端均与数据中心模块的信号输出端相连接。
20.所述信号采集模块包括地磅、摄像头、传感器、plc控制器,地磅、摄像头、传感器、plc控制器的信号输出端均与数据中心模块的信号输入端相连接。
21.远程操控及调度指挥系统建设需具备可视化大屏、操控工位、巡检工位、调度指挥工位以及畅通的数据传输通道等,将管、控、操、巡有序紧密的联系在一起。
22.远程操控及调度指挥系统中“管”是指生产管理,包括生产计划的编制、安排和落实,为了更合理的办理工作流程,为调度(主任)单独安排一个办公室,用于商务接洽;其余调度安排在对面办公室,1号工位用于当班调度,通过窗口方便与客户交流;2号工位用于计划调度,便于掌控计划情况;3号工位用于货管,便于现场货运质量管控安排。
[0023]“控”是指生产作业流程控制,在整个“远程操控”区域内,第一排工位用于中控,可以通过对讲机、监控大屏时刻了解现场情况,操控主要自动化设备或流程,例如散货码头中,主要启动或停止现场皮带,也就是生产作业流程。同时,每个工位单独设有办公电脑,用于业务系统的使用。中控工位的前方为监控大屏,整个监控大屏为采用多块液晶显示屏拼接而成,显示画面可以拼接和分割功能,结合视频监控设备,可以满足全场监控的需要。
[0024]“巡”是指生产作业智能远程巡检,第二排工位作为巡检工位,通过数字化改造,利用智能图像识别技术,替代人工现场巡检,通过摄像头自动判断现场异常情况,例如设备状态异常、皮带撒料撕裂、区域入侵等,在提高巡检效率的同时减少人员现场巡检的安全隐患。每个工位分别设置6面屏,其中4块屏根据现场监控点位重要性进行显示,1块屏作为操作监控视频,用于显示将要操作设备的监控画面,1块屏作为操作界面,用于显示将要操作设备的控制按钮。
[0025]“操”是设备智能远程操控,最后两排工位作为设备智能远程操控工位,在散货码头,主要用于卸船机、装船机、斗轮机、装车机等大机设备的智能远程操控,以斗轮机智能远程操控为例,作业司机在远程操控中心,下达简单作业指令后,斗轮机自动运行至指定位置,开始无人化作业,作业期间几乎不需要人员干预,作业情况较司机现场操控更加稳定。同时,建立堆场3d可视化模型,实现数字料场的相关功能。
[0026]
在某散货码头项目中,设备智能远程操控1号工位主要用于1#斗轮机和1#装车机(移动)的智能远程操控;2号工位主要用于2#斗轮机和2#装车机(定点)的智能远程操控;3号工位主要用于3#、4#、5#斗轮机的智能远程操控;4号工位用于1号、2号装船机的智能远程操控;5号工位用于1号、2号卸船机的智能远程操控;6号工位用于3号、4号卸船机的智能远程操控。基本满足该码头所有大机设备的设备智能远程操控需求。
[0027]
该远程操控及调度指挥系统设置有数据中心(中心机房),数据中心采用微模块机房,集服务器中心、网络中心、信息安全中心三项功能为一体,通过信号对接,也为数据传输的稳定性、带宽、时延性提供了有力保障。
[0028]
本发明中的远程操控及调度指挥系统设计主要是以港口自动化、智能化的情况,结合智慧港口未来的总体规划,以实际需求统筹建设,将港口管、控、操、巡有序紧密的联系在一起,打破了各自为营的传统工艺模式,形成了管控一体的生产流程,也进一步提高了港口的核心竞争力。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1