一种实现控制力矩陀螺框架倾角主动调节的装置
1.本发明为一种实现控制力矩陀螺框架倾角主动调节的装置,属于航天器姿态控制领域。
背景技术:
2.基于陀螺进动原理的控制力拒陀螺群广泛应用于航天姿态控制领域。其原理是通过改变陀螺轴的方向,使陀螺角动量方向发生改变,从而产生一个输出力矩。应用此力矩,即可为卫星的姿态提供一个有效地控制。
3.目前最基本的应用此原理的姿态控制机构为单框架控制力矩陀螺群(single gimbal control momentum gyroscope,sgcmg)。该机构有着以下特性:1、有着力矩放大作用,可输出大力矩;2、无须工质,无羽流污染;3、易获得良好姿态控制性能。基于以上特点,该机构有着广泛的应用。
4.由于sgcmg在使用过程中,陀螺输出转矩的方向与框架角相关,且输出转矩时,框架角亦会发生改变。因此其在控制过程中,输出力矩方向有时会陷入同一平面,导致装置无论如何都无法在平面法线方向输出力矩,从而陷入奇异失效;且当其机构中存在故障陀螺时,sgcmg会失去逃离奇异的能力,失去工作能力。为了解决此奇异问题,本发明对sgcmg进行了改进设计,使机构的倾角可变(variable gimbal control momentum gyroscope,vgcmg),从而改善机构逃离奇异,以及规避奇异的能力,除此之外,还可以提高机构的敏捷机动和容错的能力等。本发明在理论基础上,设计给出了一种实现控制力矩陀螺框架倾角主动调节的装置,给出其构建方法与相关理论分析。
技术实现要素:
5.针对上述缺陷,本发明的目的在于提供一种实现控制力矩陀螺框架倾角主动调节的装置,是对经典单框架控制力矩陀螺的一种改进,通过为装置增加伞构型,使装置获得更加优秀的使用性能。
6.一种实现控制力矩陀螺框架倾角主动调节的装置,主要包括:陀螺模块、伞构型框架以及机电控制部分;
7.其中:所述的陀螺模块为4个,均包括陀螺、轴承、联轴器、陀螺电机及用于支撑固定上述部件的陀螺框架,陀螺选用4个惯量较大的陀螺,所述的陀螺框架分为上下部分,上端的陀螺框架两侧加装有挡板;所述4个陀螺模块在机构中的构型排布,选择金字塔构型;4个陀螺模块分别置于金字塔的4条斜边;所述的陀螺框架安装在大杆上后可绕一固定轴旋转,该固定轴称之为陀螺框架轴,所述的陀螺框架轴在金字塔构型的中心和斜边的平面内,且垂直于斜边;
8.其中,伞构型框架用于传递控制力矩陀螺与航天器间的角动量,并实现倾角的改变。伞构型框架包括:支架、底座、丝杠电机、丝杠底座、联轴器、丝杠、丝母、中圈、大杆、小杆;具体结构如下:支架可固定于地面用于支撑整个装置,其通过滚动轴承与底座相连;在
执行任务时,应移除支架,将底座直接与航天器固连。所述的底座,可进一步分为内底座与外底座,通过紧固件连接,以解决装置模型较大、一体式的结构不易制造的问题;
9.丝杠电机、丝杠底座、联轴器、丝杠依次安装在底座的中心,再将丝母、中圈固定。所述的中圈为立方体结构,中间打方形孔以满足与丝母的紧密连接;所述立方体结构外侧外伸4个凸缘并形成铰接口,分别与小杆的一端铰接;底端外伸出一测距平台,用来配合测量中圈与底座的距离。中圈与丝母通过螺纹紧固件连接,以使得中圈可以和丝母一起运动。
10.大杆、小杆形成类似“伞骨”结构;小杆、大杆、外底座、中圈之间的连接使用铰接。铰接点设计如图6所示。图中第一铰点为大杆与小杆的铰点,第二铰点为大杆与外底座的铰点,两个铰点均需外延一段长度,以使得所述的大杆与小杆、大杆与外底座相连接,且所述的第一铰点外延的长度大于第二铰点外延的长度,如图中所示。这是因为大杆与小杆的夹角小于90度,如果做成第二铰点的长度,则大杆与小杆会发生干涉。而大杆与外底座,小杆与中圈之间的连接大于90度,不会发生干涉。
11.机电控制部分,包括测距模块及舵机,所述的测距模块设置于测距平台朝向内底座的一端,用来测量中圈距离底座的距离进一步得到倾角大小;所述的舵机分别设置于4根大杆上,一端与大杆固定,一端与陀螺模块的陀螺框架固定。进一步的,所述的舵机选用360度连续转动舵机。进一步的,所述的大杆上开有孔,供舵机容置,或者所述的舵机直接固定在大杆上。进一步的,所述舵机的位置在大杆的纵向对称面内,纵向位置为大杆的中间左右,陀螺框架旋转时不发生干涉即可。大杆纵向对称面如图7所示。
12.本发明提出变框架控制力矩陀螺,其优点在于:1、变框架控制力矩陀螺vgcmg相较于单框架控制力矩陀螺sgcmg的奇异情况更少,可以使航天器在运行过程中可靠性增加;2、vgcmg可以改变系统的角动量包络,其可以使航天器在需要在特定的方向输出时增大该方向的角动量包络,从而达到良好的输出性能;3、vgcmg相较于sgcmg有着更优秀的容错机制,因此有着更高的可靠性。
附图说明
13.图1陀螺角动量及其变化
14.图2金字塔构型的坐标系示意图
15.图3陀螺及其配件装配图
16.图4伞构型框架装配图
17.图5中圈结构示意图
18.图6铰连接部分示意图
19.图7大杆纵向对称面示意图
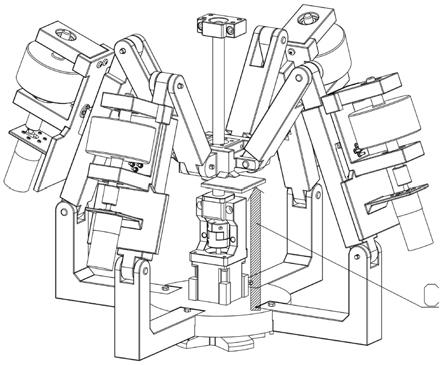
20.图8本发明整体结构图及测距路径示意图
21.图中具体标号如下:
22.001、陀螺电机002、联轴器003、陀螺框架004、陀螺
23.005、滚动轴承006、陀螺上框架007、挡板a、陀螺框架轴
24.101、支架102、外底座103、内底座104、丝杠电机
25.105、丝杠底座106、联轴器107、大杆108、舵机
26.109、中圈110、丝母111、小杆112、丝杠
27.113、丝杠上盖
28.201、测距平台202、凸缘203、立方体结构204、方形孔
29.301、第二铰点302、第三铰点303、第一铰点
30.b、纵向对称面
31.c、测距路径
具体实施方式
32.本发明中的装置通过输出力矩达到姿态控制的目的,使用的原理基于角动量定理,具体原理结合附图说明如下。
33.单个陀螺在进行旋转时会产生一个恒定的角动量。只要陀螺的转动惯量以及陀螺的角速度大小不发生改变,陀螺的角动量大小就不发生改变。不改变陀螺的角动量大小而仅改变其方向,如图1所示,在框架角进行改变时,根据角动量定
34.理
[0035][0036]
其可以产生1个方向的力矩。当处于自由状态的航天器内部的陀螺旋转时,航天器外框架需要为陀螺提供此力矩。根据牛顿第三定律,航天器框架会受到大小相等,方向相反的力矩。应用此力矩,即可实现姿态控制的目的。
[0037]
由系统的角动量守恒,因此控制陀螺运动也可以认为是一个角动量转移的过程。在需要时,将陀螺的角动量转移至外壳进行机动,在机动完成后,陀螺群再将外壳的角动量吸收。
[0038]
如果使用3个陀螺轴不重合的陀螺,即可在空间3个方向产生力矩,从而实现三轴姿态控制的目的。为了提高机构的鲁棒性以及减少奇异情况,机构一般会需要冗余自由度,及使用更多陀螺的情况。陀螺数量越小,则机构遭遇奇异的可能性越大,而陀螺数量越大,则机构的体积,质量以及功率需求又更大。综合以上因素,本实施例最终使用4个陀螺。
[0039]
对于陀螺在机构中的构型排布,我们选择金字塔构型。
[0040]
sgcmg是最基本的控制力矩陀螺群,因此对其的建模对vgcmg有着指导意义。首先对sgcmg进行模型构建:
[0041]
如图2所示,坐标系以金字塔构型的中心为原点,其指向塔顶为坐标系z轴,其指向其中一角为x轴,并根据右手定则确定y轴。4个陀螺分别置于金字塔的4条斜边,陀螺框架轴a(如图3所示)在原点和斜边的平面内且垂直于斜边。
[0042]
我们令xoz半平面内的陀螺为1号,yoz半平面内的陀螺为2号,
‑
xoz半平面内的陀螺为3号,
‑
yoz半平面内的陀螺为4号,并设陀螺角动量方向与金字塔斜边的夹角为其框架角o
i
(i∈{1,2,3,4}),当陀螺角动量方向指向塔顶时,框架角为0度;再设金字塔斜边与底面的夹角为倾角β,可知4个陀螺的倾角相等,均为β。
[0043]
陀螺的角动量方向矢量为陀螺框架轴方向矢量为则陀螺因旋转而所需的力矩方向矢量
[0044]
[0045]
该框架轴的方向可以描述为
[0046][0047]
系统的总角动量l满足
[0048]
l=l1g1+l2g2+l3g3+l4g4=a
×
l(4)
[0049]
其中a为3
×
4的矩阵,l为4
×
1的向量。
[0050][0051]
l=[l1l2l3l4]
t
(6)
[0052]
其中c代表cos,s代表sin,l1,l2,l3,l4分别为4个陀螺角动量的大小。
[0053]
由角动量定理,当陀螺转动时,陀螺输出的力矩是其角动量对时间的导数。因此系统瞬时输出的力矩为系统角动量对时间的导数,即
[0054][0055][0056]
其中o=[o1o2o3o4],其为每个框架角的导数,即框架角速度。令则
[0057][0058]
经计算可以得到d的表达式
[0059][0060]
其中diag代表以括号内元素构成的对角矩阵。
[0061]
vgcmg的模型可以沿用sgcmg,与其不同的是,vgcmg中倾角β不再是常数,而是可控量。
[0062]
对于vgcmg,控制力拒陀螺群可以输出的力矩为
[0063]
[0064][0065]
令矩阵则
[0066][0067]
经计算可以得到矩阵d与e的表达式
[0068][0069][0070]
由上可得到装置在框架角及倾角变化时的输出力矩。可见改变框架进行输出时通过d矩阵输出,而改变倾角变化进行输出时通过e矩阵输出。
[0071]
本发明中的装置同时通过变化其框架角与倾角输出力矩,从而达到姿态控制的目的。
[0072]
本发明一种实现控制力矩陀螺框架倾角主动调节的装置,其构建方法包括以下步骤:
[0073]
第一步,使用定制陀螺与轴系零件搭建单个陀螺及其配件。
[0074]
本发明实施例的陀螺模块为4个,陀螺选用4个惯量较大的陀螺;所述4个陀螺模块在机构中的构型排布,选择金字塔构型;4个陀螺模块分别置于金字塔的4条斜边;所述的陀螺框架安装在大杆上后可绕一固定轴旋转,该固定轴称之为陀螺框架轴,所述的陀螺框架轴在金字塔构型的中心和斜边的平面内,且垂直于斜边;
[0075]
如图3所示,陀螺模块部分由陀螺框架003、陀螺上框架006、陀螺004、滚动轴承005、联轴器002、陀螺电机001组成。陀螺框架003用来支撑各部件。安装时依次将陀螺电机001、联轴器002、滚动轴承005、陀螺004依次安装。为了满足安装工艺,将上框架独立出来,在全部轴系零件安装完成后最后安装陀螺上框架006。由于该部分主要的传力方向为陀螺轴的垂直方向,因此在陀螺上框架006的两侧加装两挡板007,用于陀螺上框架与陀螺框架的传力。与陀螺电机配合的电池等元件可固定在陀螺电机旁的框架上。
[0076]
之后,将舵机108固定在大杆上后,再将陀螺组件部分与控制其转动的舵机固连。值得注意的是,在完成本步骤陀螺部分的设计后(包括电池等部件),应该计算确定陀螺框架轴(所述的陀螺框架安装在大杆上后可绕一固定轴旋转,该固定轴称之为陀螺框架轴)大概的位置。如图3所示,图中箭头方向即为陀螺框架轴a,因此应在与所述陀螺框架轴a对应的位置打孔,并通过螺栓连接的方式与舵机固连。
[0077]
第二步,使用滚珠丝杠及若干定制零件搭建丝杠及伞构型框架部分。
[0078]
伞框架部分目的是传递控制力矩陀螺与航天器间的角动量,并实现倾角的改变。因此在满足强度的条件下,应尽可能减轻其重量。又由于框架部分构型不规则,可以使用3d打印方式制造。本实施例中使用韧性树脂制造框架。
[0079]
如图4所示,支架101用于地面使用支撑使用,其通过滚动轴承与底座相连。在执行任务时,应移除支架,将底座直接与航天器固连。由于本装置模型较大,因此一体式的结构不易制造,将其分为内底座103与外底座102分别制造,再通过紧固件连接。
[0080]
将底座安装好后,继续搭建丝杠部分。将丝杠电机104、丝杠底座105、联轴器106、丝杠112依此安装在底座的中心,再将丝母110、中圈109、丝杠上盖113固定。
[0081]
最后安装大杆107、小杆111部分。小杆、大杆、外底座、中圈之间的连接使用铰接。铰接点设计如图6所示。值得注意的是,大杆与小杆连接的第一铰点303应做的比大杆与外底座连接的第二铰点301更长,如图中所示。这是因为大杆与小杆的夹角小于90度,如果做成第二铰点的长度,则大杆与小杆会发生干涉。而大杆与外底座,小杆与中圈之间的连接的第三铰点302大于90度,不会发生干涉。
[0082]
第三步,使用测距模块与高性能舵机搭建机电控制部分。
[0083]
本方法中将使用超声波测距模块以及陀螺模块作为测控模块。陀螺模块紧贴在伞构型框架上,用来测量总体装置的转角。在航天器中,可以使用专用的高精度陀螺仪而无需在本机构中单独加入陀螺仪。超声波测距模块用来测量中圈距离底座的距离。如图5所示,所述的中圈为一立方体结构203,中间打方形孔204用于与丝母配合并紧密连接;立方体结构外侧外伸4个凸缘202并形成铰接口,分别与小杆的一端铰接;底端外伸出一测距平台201,用来配合测量中圈与底座的距离。如图8所示,将测距模块放置在测距平台201底面,即箭头底端,测量箭头路径的距离,再通过换算公式
[0084][0085]
即可得到倾角大小。其中h为中圈距离底座的距离,l1为大杆与外底座铰点(即第二铰点)和小杆与中圈铰点(即第三铰点)连线在底座平面内投影的距离,l2为大杆两铰点间的距离,l3为小杆两铰点间的距离。
[0086]
安装在大杆上的陀螺框架舵机需要选用内置码盘的大扭矩连续旋转舵机。将舵机一侧与大杆固定,而另一端与第一步搭建的陀螺模块部分固连。在使用过程中,可以通过读取其返回的码盘数据得到陀螺的框架角,用来进行控制。为了精确控制输出转矩,应使舵机有能力输出足够大扭矩。在输出方程中,输出扭矩大小与舵机转速大小息息相关,而非其转角。因此应当选用可360度连续转动舵机,而非精确控制转角的舵机。
[0087]
选用合理的控制板,将4个舵机,丝杠电机,陀螺,测距模块正确连接在控制板,并使用操纵率控制,即可完成变框架控制力矩陀螺的功能。
[0088]
本实施例中各个部件之间的线路方面是通用的连接。本发明使用arduino控制板,通过导线与舵机相连,控制板向舵机给出输出指令控制舵机输出,舵机通过其内部的码盘测量其转速并反馈给控制板进行下一步控制。控制板与测距模块与操控丝杠运动的步进电机相连,测距模块测量中圈与底座之间的距离,并将其反馈给控制板,控制板进行计算可得到机构的倾角大小。控制板向步进电机输出指令,控制其运动以使丝杠转动,从而改变中圈
高度与机构倾角。
[0089]
以上所述是本发明的实施方法,本发明设计给出了制作变框架控制力矩陀螺的方法,通过该方法得到的变框架控制力矩陀螺有着多种优势,具有良好的推广前景。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1