一种无人艇高性能轨迹跟踪控制系统和方法
1.本发明属于无人艇轨迹跟踪控技术领域,具体涉及一种无人艇高性能轨迹跟踪控制系统和方法。
背景技术:
2.人类科学技术的发展加速了人类对于海洋资源的探索和开发进程,对于搭载各种传感器和控制器的无人艇的研究成为科研和应用的热点方向。由于海洋环境瞬息万变,当海况发生剧烈变化时,外界环境将对无人艇产生巨大的干扰,同时海上通信环境恶劣容易诱发通讯数据丢失,通讯失效等问题,这都增加了无人艇轨迹跟踪任务的失败。因此,需要设计一种具有容错能力的轨迹跟踪控制方法和系统,来有效的克服执行器故障,减少时变外界扰动和系统不确定性对于无人艇航行过程中的可靠性和稳定性的影响,确保可以高效稳定顺利的进行无人艇航行任务。
技术实现要素:
3.本发明的目的在于提供一种稳定性好的无人艇高性能轨迹跟踪控制系统,并提供了一种无人艇高性能轨迹跟踪控制方法。
4.基于上述目的,本发明采用如下技术方案:
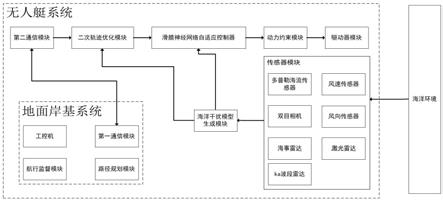
5.一种无人艇高性能轨迹跟踪控制系统,包括地面岸基系统和无人艇系统;地面岸基系统包括工控机、第一通信模块、路径规划模块和航行监督模块;路径规划模块用于生成无人艇系统的初级任务轨迹,并用于将初级任务轨迹传输至无人艇系统;第一通信模块用于接收和传输信息;航行监督模块用于接收无人艇系统传输的航行状态信息和数字化干扰信息,并用于判断无人艇系统是否偏航;无人艇系统包括传感器模块、海洋干扰模型生成模块、第二通信模块、二次轨迹优化模块、滑膜神经网络自适应控制器模块、动力约束模块、驱动器模块;传感器模块用于观测海洋上的干扰信息,并用于将干扰信息传输至海洋干扰模型生成模块;海洋干扰模型生成模块用于将干扰信息数字化整合,生成数字化干扰信息,并用于将数字化干扰信息传输至航行监督模块、二次轨迹优化模块和滑膜神经网络自适应控制器模块;第二通信模块用于接收和传输信息;二次轨迹优化模块用于接收数字化干扰信息和初级任务轨迹,生成二次优化轨迹,还用于将二次优化轨迹传输至滑膜神经网络自适应控制器模块;滑膜神经网络自适应控制器模块用于生成无人艇系统的航行状态信息,并用于将航行状态信息传输至航行监督模块;滑膜神经网络自适应控制器模块还用于生成理论控制律,并用于将理论控制律传输至动力约束模块;动力约束模块用于对理论控制律进行优化,生成实际控制律,并用于将实际控制律传输至驱动器模块;驱动器模块用于根据实际控制律驱动无人艇系统航行。
6.进一步的,滑膜神经网络自适应控制器模块包括非奇异快速终端滑模函数、径向基神经网络、自适应控制律和无人艇模型模块;无人艇模型模块用于生成自身的航行状态信息,并用于接收数字化干扰信息;无人艇模型模块还用于生成无人艇数学模型,并用于提
供理论控制律计算所需的参数信息;航行状态信息包括自身的位置信息、速度信息和姿态信息;非奇异快速终端滑模函数、径向基神经网络和自适应控制律用于生成理论控制律。
7.进一步的,传感器模块包括风浪干扰观测传感器和周围环境观测传感器;风浪干扰观测传感器用于获取风、浪信息,周围环境观测传感器用于获取障碍物信息。
8.进一步的,周围环境观测传感器包括ka波段雷达、海事雷达、双目相机、激光雷达;ka波段雷达和海事雷达用于获取远距离的障碍物信息;双目相机、激光雷达用于获取近距离的障碍物信息;风浪干扰观测传感器包括多普勒海流传感器、风速传感器和风向传感器。
9.上述无人艇高性能轨迹跟踪控制系统的控制方法,包括以下步骤,
10.步骤1,对路径规划模块下达任务指令,路径规划模块根据任务指令生成初级任务轨迹,并通过第一通信模块和第二通信模块将初级任务轨迹传输至二次轨迹优化模块;
11.步骤2,周围环境观测传感器获取障碍物信息,并将障碍物信息传输至海洋环境干扰模型生成模块;风浪干扰观测传感器获取风、浪信息,并将风、浪信息传输至海洋环境干扰模型生成模块;海洋干扰模型生成模块将风、浪和障碍物产生的干扰信息数字化整合,生成数字化干扰信息,并将数字化干扰信息传输至二次轨迹优化模块和无人艇模型模块,还将数字化干扰信息通过第二通信模块和第一通信模块传输至航行监督模块;
12.步骤3,二次轨迹优化模块根据接收到的初级任务轨迹和数字化干扰信息对初级任务轨迹优化,生成二次优化轨迹,并将二次优化轨迹传输至滑膜神经网络自适应控制器模块;
13.步骤4,滑膜神经网络自适应控制器模块生成自身的航行状态信息,并将航行状态信息通过第二通信模块和第一通信模块传输至航行监督模块;滑膜神经网络自适应控制器模块还将接收的数字化干扰信息与航行状态信息结合,生成无人艇数学模型;滑膜神经网络自适应控制器模块根据无人艇数学模型、接收到的二次优化轨迹和数字化干扰信息生成理论控制律,并将理论控制律传输至动力约束模块;
14.步骤5,动力约束模块将接收的理论控制率进行优化,生成实际控制律,并将实际控制律传输至驱动器模块;
15.步骤6,驱动器模块根据接收的实际控制律驱动无人艇系统航行。
16.步骤7,在无人艇实时航行的过程中,无人艇模型模块通过第二通信模块和第一通信模块将当前无人艇航行状态信息传输给地面岸基系统,地面岸基系统对于无人艇航行状态实时进行安全监控。
17.进一步的,在步骤4中,理论控制律为
[0018][0019][0020]
式中,τ表示数学模型的控制输入,表示去除不确定性名义上的惯性矩阵,η
d
表示期望的位置信息,δ是一个大于0的常数,ρ为模型参数不确定的上界,s为非奇异快速终端滑模函数,ω
e
表示速度误差,k1、k2为大于0的正常数,α,β为指数增益,α>β,1<β<2,表示增益矩阵的估计值;c表示向心力矩阵,d表示水动力矩阵。
[0021]
进一步的,在步骤4中,无人艇模型模块生成数学模型,其方法为:
[0022][0023]
式中,j(η)表示坐标转换矩阵,η表示位置信息,v表示速度信息,m表示惯性矩阵,c(v)表示向心力矩阵,d(v)表示水动力矩阵,τ表示控制输入,τ的初始值为0,τ
d
表示数字化干扰信息的干扰数值。
[0024]
进一步的,在步骤4中,非奇异快速终端滑模函数
[0025]
s=η
e
+k1|η
e
|
α
sign(η
e
)+k2|ω
e
|
β
sign(ω
e
)
[0026]
式中,η
e
表示位置误差,ω
e
表示速度误差,k1、k2为大于0的正常数,α,β为指数增益,α>β,1<β<2。
[0027]
进一步的,自适应律为
[0028][0029][0030]
式中,表示对权重的估计的导数,表示增益矩阵的估计值的导数。
[0031]
进一步的,在步骤4中,径向基神经网络为:
[0032][0033]
式中,为不确定性的估计项,表示估计权重,r为在实数域,θ=[θ1,
…
,θ
n
]
t
表示径向基函数向量,径向基函数采用高斯径向基函数;x为向量,χ为径向基神经网络输入向量的中心,b为径向基神经网络输入向量的宽度,n为矩阵维度
[0034][0035]
式中,χ
i
表示第i个径向基神经网络输入向量的中心,b
i
表示第i个径向基神经网络输入向量的宽度。
[0036]
与现有技术相比,本发明具有以下有益效果:
[0037]
地面岸基系统的航行监督模块用于监控无人艇的航行状态、包括位置信息、速度信息和姿态信息,当无人艇发生较大偏航时对无人艇轨迹进行修改,生成新的初级任务轨迹,保证无人艇系统稳定运行。
[0038]
滑膜神经网络自适应控制器模块中的非奇异快速终端滑模函数用于确保无人艇系统全局渐进稳定和保证位置误差和速度误差的快速收敛;径向基神经网络用于减少无人艇模型生成的参数不确定和外界干测量的不确定对于控制律的影响;自适应控制律用于被动抵抗执行器故障,加强无人艇系统的鲁棒性;通过三者的结合保证无人艇系统轨迹跟踪控制系统的高效稳定运行。本发明通过将非奇异快速终端滑模函数、径向基神经网络和自适应控制律三者相结合提供理论控制输出,保证了无人艇轨迹跟踪控制系统的稳定性和有效性,并且对于来自外界环境干扰和自身模型参数的不确定性产生一定的鲁棒作用。
[0039]
动力约束模块接收来自滑膜神经网络自适应控制器模块传输的理论控制律并且对理论控制律进行优化;实际的无人艇系统由于执行器的物理因素,存在着执行器饱和、死区和时延的现实问题,根据滑膜神经网络自适应控制器计算出的理论控制律往往不能满足实际的控制需求,因此需要对理论控制律进行优化;动力约束模块将接收的理论控制律进行优化后生成的实际控制律传输给驱动器模块进行执行。通过动力约束模块对于理论控制律的优化,使用实际控制律满足驱动器的相关性能,克服驱动器饱和、死区和时延的负面影响,提高了控制的精准程度。
[0040]
ka波段雷达和海事雷达用于获取远距离的障碍物信息,提前规划航行轨迹;双目相机、激光雷达用于获取近距离的障碍物信息,用于紧急避碰;风浪干扰观测传感器包括多普勒海流传感器、风速传感器和风向传感器,用于实时获得无人艇当前航行状态周围的各种无形的环境干扰。
[0041]
海洋干扰模型生成模块将数字化干扰信息传输给二次轨迹优化模块用于优化任务轨迹,使当前的初次轨迹更加适用于当前航行的实际状态,同时提前规避障碍物和完成和紧急避碰。与传统岸基基站进行任务轨迹规划相比,本发明提供的二次轨迹优化模块通过结合无人艇当前的航行状态和周围环境信息,对于航行轨迹进行二次优化,使任务轨迹更加的符合实际航行的要求,同时提高了航行的安全性。
附图说明
[0042]
图1为本发明实施例1的示意图;
[0043]
图2为本发明实施例1的滑膜神经网络自适应控制器模块的示意图。
具体实施方式
[0044]
实施例1
[0045]
一种无人艇高性能轨迹跟踪控制系统,包括地面岸基系统和无人艇系统;地面岸基系统包括工控机、第一通信模块、路径规划模块和航行监督模块。路径规划模块用于根据无人艇的任务需求对无人艇的轨迹进行初次规划,生成无人艇系统的初级任务轨迹,并用于将初级任务轨迹通过第一通信模块传输至水面上的无人艇系统。第一通信模块用于在地面岸基系统和无人艇系统之间接收和传输信息。航行监督模块用于接收无人艇系统传输的航行状态信息(包括位置信息、速度信息和姿态信息)和数字化干扰信息,并用于判断无人艇系统是否偏航;航行监督模块用于监控无人艇的航行状态、包括位置信息、速度信息和姿态信息,当无人艇发生较大偏航时,工控机控制路径规划模块对无人艇轨迹进行修改,生成新的初级任务轨迹。
[0046]
无人艇系统包括传感器模块、海洋干扰模型生成模块、第二通信模块、二次轨迹优化模块、滑膜神经网络自适应控制器模块、动力约束模块、驱动器模块。传感器模块用于观测海洋上的干扰信息,并用于将干扰信息传输至海洋干扰模型生成模块;海洋上的干扰信息包括远距离障碍物信息、近距离障碍物和周围环境的风浪干扰信息。海洋干扰模型生成模块用于接收长安器模块传输的干扰信息,将干扰信息数字化整合,生成数字化干扰信息,并用于将数字化干扰信息传输至航行监督模块、二次轨迹优化模块和滑膜神经网络自适应控制器模块。
[0047]
第二通信模块用于接收和传输信息;二次轨迹优化模块用于接收数字化干扰信息和初级任务轨迹,并用于结合数字化干扰信息优化初级任务轨迹,生成二次优化轨迹,使用任务轨迹更加适合当前的实际情况;二次轨迹优化模块还用于将二次优化轨迹传输至滑膜神经网络自适应控制器模块。二次优化轨迹生成后传输给滑膜神经网络自适应控制器模块用于提供控制器期望跟踪的任务轨迹;二次轨迹优化模块会实时结合当前的环境信息进行轨迹的更新,为滑膜神经网络自适应控制器模块提供轨迹跟踪来源。
[0048]
滑膜神经网络自适应控制器模块用于生成无人艇系统的航行状态信息,并用于将航行状态信息传输至航行监督模块;滑膜神经网络自适应控制器模块还用于生成理论控制律,并用于将理论控制律传输至动力约束模块。动力约束模块用于接收理论控制律并对理论控制律进行优化,生成实际控制律,提前对于驱动器存在的驱动器饱和、时延和死区的问题做出优化;动力约束模块还用于将实际控制律传输至驱动器模块。驱动器模块与动力约束模块相连接,用于接收实际控制律,并用于根据实际控制律驱动无人艇系统航行。
[0049]
滑膜神经网络自适应控制器模块包括非奇异快速终端滑模函数、径向基神经网络、自适应控制律和无人艇模型模块;无人艇模型模块用于生成自身的航行状态信息,并用于接收数字化干扰信息;无人艇模型模块还用于生成无人艇数学模型,无人艇数学模型可提供理论控制律计算所需的参数信息;航行状态信息包括自身的位置信息、速度信息和姿态信息;非奇异快速终端滑模函数、径向基神经网络和自适应控制律三者相结合用于生成理论控制律,理论控制律的输出用于更新无人艇数学模型。
[0050]
传感器模块包括风浪干扰观测传感器和周围环境观测传感器;风浪干扰观测传感器用于获取风、浪信息,周围环境观测传感器用于获取有形的环境障碍。周围环境观测传感器包括ka波段雷达、海事雷达、双目相机、激光雷达;ka波段雷达和海事雷达用于获取远距离的障碍物信息,提前规划航行轨迹;双目相机、激光雷达用于获取近距离的障碍物信息,用于紧急避碰;风浪干扰观测传感器包括多普勒海流传感器、风速传感器和风向传感器,用于实时获得无人艇当前航行状态周围的各种无形的环境干扰。
[0051]
实施例2
[0052]
实施例1中无人艇高性能轨迹跟踪控制系统的控制方法,包括以下步骤,
[0053]
步骤1,根据任务需求通过工控机对路径规划模块下达任务指令;路径规划模块根据任务指令生成初级任务轨迹,并通过第一通信模块和第二通信模块将初级任务轨迹传输至二次轨迹优化模块。
[0054]
步骤2,ka波段雷达和海事雷达获取远距离的障碍物信息,并将远距离的障碍物信息传输至海洋环境干扰模型生成模块;双目相机、激光雷达获取近距离的障碍物信息,并将近距离的障碍物信息传输至海洋环境干扰模型生成模块;风速传感器、风向传感器和多普勒海流传感器获取风、浪信息,并将风、浪信息传输至海洋环境干扰模型生成模块。海洋干扰模型生成模块将风、浪和近距离的障碍物信息、远距离的障碍物信息进行数字化整合,生成数字化干扰信息,并将数字化干扰信息传输至二次轨迹优化模块和无人艇模型模块,还将数字化干扰信息通过第二通信模块和第一通信模块传输至航行监督模块。
[0055]
步骤3,二次轨迹优化模块接收数字化干扰信息,并通过第二通信模块接收初级任务轨迹;二次轨迹优化模块根据数字化干扰信息对初级任务轨迹优化,生成二次优化轨迹,并将二次优化轨迹传输至滑膜神经网络自适应控制器模块。
[0056]
步骤4,无人艇模型模块生成自身的位置信息、速度信息和姿态信息,并将位置信息、速度信息和姿态信息通过第二通信模块和第一通信模块传输至航行监督模块;无人艇模型模块还将接收的数字化干扰信息与位置信息、速度信息和姿态信息结合,生成无人艇数学模型,并对无人艇数学模型进行实时更新;滑膜神经网络自适应控制器模块接收到二次优化轨迹后,其内部的非奇异快速终端滑模函数、径向基神经网络和自适应控制律根据无人艇数学模型、接收到的二次优化轨迹和数字化干扰信息生成理论控制律,并将理论控制律传输至动力约束模块。
[0057]
无人艇模型模块生成数学模型的方法为:
[0058][0059]
式中,j(η)为坐标转换矩阵,η表示位置信息,位置信息包括当前的横向位置,纵向位置,角度位置;v表示速度信息,速度信息包括当前的横向速度,纵向速度和角度速度;m为惯性矩阵,表示船体的惯性;c(v)为向心力矩阵,表示船体的受到向心力,设置c(v)的初始值(估计值)用于初次计算;d(v)为水动力矩阵,表示水对于船体的阻力,设置d(v)的初始值(估计值)用于初次计算;τ表示控制输入,τ的初始值为0,τ
d
为数字化干扰信息的干扰数值,表示外界干扰。
[0060]
非奇异快速终端滑模函数
[0061]
s=η
e
+k1|η
e
|
α
sign(η
e
)+k2|ω
e
|
β
sign(ω
e
)
ꢀꢀ
(2)
[0062]
式中,η
e
表示位置误差,包括横向误差、纵向误差和角度误差;ω
e
表示速度误差,k1,k2为大于0的正常数(增益);α,β为指数增益,α>β,1<β<2。
[0063]
径向基神经网络为:
[0064][0065]
式中,ρ为模型参数不确定的上界,为不确定性的估计项,即对模型参数不确定项的估计值;表示估计权重,r为在实数域,n*3表示一个n*3的矩阵,n为矩阵维度;θ=[θ1,
…
,θ
n
]
t
表示径向基函数向量,径向基函数采用高斯径向基函数;x为向量,χ为径向基神经网络输入向量的中心,b为径向基神经网络输入向量的宽度,
[0066][0067]
式中,χ
i
表示第i个径向基神经网络输入向量的中心,b
i
表示第i个径向基神经网络输入向量的宽度。θ
i
(x)即为θ
i
,也即θ(x,χ,b)。
[0068]
自适应律为
[0069][0070][0071]
式中,表示对权重的估计的导数,表示增益矩阵的估计值的导数,μ
w
、μ
k
为控
制率参数,μ
w
>0,μ
k
>0。
[0072]
理论控制律为
[0073][0074][0075]
式中,表示去除不确定性名义上的惯性矩阵,η
d
表示期望的位置信息,δ是一个大于0的常数,为了保证算法稳定的设计的;c表示向心力矩阵,d表示水动力矩阵;τ作为控制输入作用于无人艇数学模型,循环数学模型到理论控制率的计算;滑膜神经网络自适应控制器模块结合无人艇的航行状态信息实时更新无人艇数学模型与理论控制率,使理论控制率适用于无人艇的当前航行状态,进而使无人艇保持稳定的轨迹跟踪。
[0076]
步骤5,动力约束模块接收理论控制率,将接收的理论控制率进行实际优化,生成实际控制律,使其符合无人艇能够输出的实际作用范围;然后动力约束模块将实际控制律传输至驱动器模块。
[0077]
步骤6,驱动器模块用于接收实际控制律,并且按照实际控制律进行电机转矩输出,最终完成无人挺轨迹跟踪任务。
[0078]
步骤7,在无人艇实时航行的过程中,无人艇模型模块实时的通过第二通信模块和第一通信模块将当前无人艇位置信息、速度信息和姿态信息传输给航行监督模块,航行监督模块接收无人艇的位置信息、速度信息和姿态信息,并对于无人艇航行状态实时进行安全监控。当航行监督模块检测到无人艇发生较大偏航时,航行监督模块向工控机发出警报信号,工控机接收到警报信号后控制路径规划模块对无人艇轨迹进行修改,生成新的初级任务轨迹,并重复步骤1
‑
6。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1