一种基于T-S模糊模型的非线性控制系统故障检测方法
一种基于t
‑
s模糊模型的非线性控制系统故障检测方法
技术领域
1.本发明涉及工业生产过程中非线性控制系统的故障诊断技术领域,特别是针对t
‑
s模糊模型具有良好的逼近性能可准确描述非线性系统的特性,提出了一种基于t
‑
s模糊建模技术的非线性控制系统故障检测方法,是在复杂非线性系统模糊控制和故障诊断方面的的具体应用。
背景技术:
2.随着科学技术的发展,对设备和被控系统的安全性、可靠性和有效性的要求也越来越高,有关复杂系统故障诊断技术的研究越来越受到重视。然而,自然界中的实际系统从严格意义上来讲几乎都是非线性的,为提高非线性系统故障诊断性能,同时在实际应用中能够更加有效的对非线性系统进行故障检测,深入研究非线性系统的通用故障诊断技术具有重要的理论价值和广泛的实际应用前景。
3.目前,针对于非线性系统的故障诊断一般有两大类方法。第一类是将非线性系统在其一个或几个工作点附近线性化,得到一组系统的线性模型。将建模误差作为未知输入,利用未知输入解耦技术设计残差,使其不受建模误差影响。另一类则直接建立非线性模型,再利用非线性观测器方法和非线性参数估计方法进行诊断。前者可以借用成熟的线性系统故障诊断技术,但只适用于工作点不多且工作点非线性化程度不高的情况,如t
‑
s模糊模型等。后者发展还不完善,大都是针对某种特定的非线性系统,如仿生非线性系统和lipschitz非线性系统等。
4.实际上,对于更加一般化的非线性系统的还处于初步探索阶段,同时现有的非线性故障检测方法主要是针对开环系统提出的,通常是利用残差信号来设计评价函数,并且采用预设阈值来作为判断系统是否存在故障的指标。相对于开环系统,国内外对于闭环非线性系统的故障检测技术研究还不是很深入,如何将开环系统的成熟理论应用到闭环系统之中还有待于进一步深入研究,这些也极大限制了非线性系统故障诊断技术研究的发展。
技术实现要素:
5.为了克服上述现有技术的不足,本发明提供了一种基于t
‑
s模糊建模技术的非线性控制系统的故障检测方法。首先利用一组t
‑
s模糊局部模型来对一般类型的非线性系统进行近似逼近,随后引入基于模糊观测器的控制器来保证非线性系统的稳定性,并构造非线性系统和标称非线性系统的像表征。在像表征的基础上,通过产生输入和输出误差来设置评价函数,然后通过求解一系列的线性矩阵不等式(lmi)来完成阈值设定,并通过基于输入输出稳定性的决策逻辑,给出了非线性控制系统的故障检测系统的设计。本发明方法在分别建立系统和标称系统像表征的同时生成了系统所需的输入和输出误差,用来替代残差信号设计评价函数,并采用参考信号设定阈值,极大地提高了系统的稳定性,使适用对象更加广泛,并且有效减少过程监测中误报、漏报的发生,提高故障检测的准确性。
6.本发明采用了如下的技术方案及实现步骤:
7.a.构建像表征:
8.1)由于非线性系统可通过t
‑
s模糊模型达到以任意精度逼近,但在本说明中我们只考虑连续时间的t
‑
s模糊系统,其可以描述为plantifφ1(t)isandφ2(t)isand
…
andφ
n
(t)isthen
[0009][0010]
其中是第i个模糊规则;φ(t)=[φ1(t)
…
φ
n
(t)]是可测量的前件变量。是模糊集;τ是规则的数目。
[0011]
δa(x,u),δb(x,u),δc(x,u),δd(x,u)表示系统的不确定性,并且满足
[0012][0013]
其中ξ
a
,ξ
b
,ξ
c
,ξ
d
>0。(a
i
,b
i
,c
i
,d
i
)是具有适当维度的系统矩阵。为简单起见,我们采用δa,δb,δc,δd来表示δa(x,u),δb(x,u),δc(x,u),δd(x,u)。
[0014]
2)设μ
i
(φ(t))是归一化的模糊隶属函数,可以被定义为
[0015][0016]
因此,可得到μ
i
(φ(t))≥0和在后面的说明中,使用μ
i
表示μ
i
(φ(t))。通过使用中心平均解模糊器、单值模糊器和乘积推理机,使得全局t
‑
s模糊系统能够被表示出来:
[0017][0018]
3)本说明采用以下基于观测器的控制器来保证模糊系统(3)的稳定性:
[0019]
plantifφ1(t)isandφ2(t)isand
…
andφ
n
(t)isthen
[0020][0021]
其中是控制器,和是需要分别设计
的第i个子系统的观测器增益矩阵。通过定义
[0022][0023][0024]
该全局控制器可表示为
[0025][0026]
4)然后,基于式(3)和(6),我们可以将(3)的像表征方法表示为以下形式,a为参考信号:
[0027][0028]
在此基础上,式(9)的标称系统像表征形式如下所示:
[0029]
plantifφ1(t)isandφ2(t)isand
…
andφ
n
(t)isthen
[0030][0031]
还可以表示为
[0032][0033]
其中,和分别代表标称系统的状态、输入和输出。
[0034]
b.故障检测方法的设计与实现:
[0035]
5)首先根据a中像表征方法(7)、(9)产生输入和输出误差,随后研究非线性控制系统的故障检测方法。
[0036]
通过定义
[0037]
[0038]
在式(9)和(11)的基础上,可以得到
[0039][0040]
其中
[0041][0042]
6)综上所述,由此提出了故障检测系统的设计思路与方法。
[0043]
定理1:考虑系统(10),如果存在正常数β,ρ和正定对称矩阵t1,t2,使得下列不等式满足
[0044]
ξ
il
<0,i,l∈{1,
…
,τ}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0045]
其中
[0046][0047][0048][0049][0050]
[0051]
存在:
[0052][0053]
证明:选取下列函数
[0054][0055]
由于(14)可以通过以下不等式得出
[0056][0057]
以及
[0058][0059]
根据式(10),可以得到:
[0060][0061]
其中
[0062][0063]
显然(18)能够通过下式推断出来
[0064]
ψ
μ
<0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(20)
[0065]
可以等效地表示为
[0066][0067]
使用schur补引理。根据模糊基函数,(20)可以写成
[0068][0069]
的定义见(13),以及
[0070][0071]
对于任何β>0,总有
[0072][0073]
因此,如果满足式(25)的条件,(22)就成立,其中ξ
il
的定义见(13)。由此可见,通过式(12)可以推导出式(25),证明结束。
[0074][0075]
以下考虑式(14),可以通过设置评价函数(26)作为故障检测目标。其中和[0 κ]表示时间窗。另外,阈值可以通过以下方式给出,见(27)。
[0076][0077][0078]
然后,通过以下决策逻辑可构建故障检测系统。
[0079][0080]
有益效果
[0081]
本发明在设计评价函数时,采用了输入与输出误差而不是残差信号,不仅削弱了干扰对于故障检测的影响,而且对于故障有较高的灵敏度,提高了检测精度。同时,通过求解矩阵不等式,在保证系统输入
‑
输出稳定性的基础上完成了对阈值的设计工作,对今后研究闭环非线性系统的故障检测技术提供了新的见解。
附图说明
[0082]
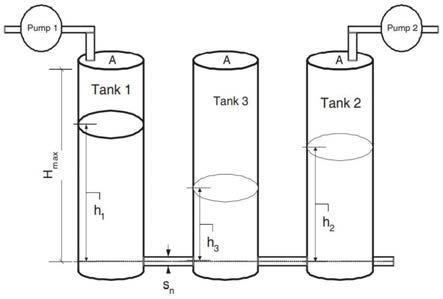
图1所示为三容水箱实验装置图示。
[0083]
图2所示为前件变量x1的隶属函数图示。
[0084]
图3所示为模拟反馈控制系统的参考信号结果图示。
[0085]
图4所示为无故障状态下的输入
‑
输出误差结果图示。
[0086]
图5所示为有故障状态下的输入
‑
输出误差结果图示。
[0087]
图6所示为故障检测结果图示。
具体实施方式
[0088]
三容水箱是典型的过程控制实验设备之一,在国内外很多大学和实验室都已得到了广泛的应用,并且在许多研究项目中用于非线性控制和故障检测。三容水箱实验系统由水箱主体、检测元件、水泵、信号处理箱及控制用计算机构成,总体结构如图1所示。水箱主体是由三个圆柱形容器、一个回收水槽及多个阀门和连接件构成。
[0089]
通过在工作点[5 2 3.5]
t
和[10 2 6]
t
处分别线性化三容水箱系统,可得
[0090][0091][0092][0093][0094]
假设三容水箱的工作范围是[020](单位:厘米)。前件变量x1的隶属函数如图2所示。同时,我们假设模型的不确定性δa,δb,δc是以ξ
a
=0.0001,ξ
b
=0.0002,ξ
c
=0.0001为界限的。
[0095]
采用式(9)中提出的求解观测器和控制器增益矩阵的方法,可以得出这样一个结论,基于观测器的控制器(6)可以确保三容水箱的稳定性。此外,还可以构建系统的标称像表征(9),它可以用来生成系统的输入和输出误差δz(t)。
[0096]
根据定理1,通过求解线性矩阵不等式(12),令β=106,我们可以得到ρ=1.0137。通过模拟反馈控制系统的参考信号来验证本文方法的有效性,如图3所示。在无故障情况下的输入和输出误差如图4所示。为了验证故障检测性能,采取模拟水箱1和水箱2的水位在800s时偏移10cm和15cm的方法,观察输入和输出误差的变化,如图5所示。依据评价函数(26)和κ=10s的阈值(27),由图6可以明显看出故障已经被检测出来。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1