飞行装置的制作方法
1.本发明涉及一种飞行装置。
背景技术:
2.以往,已知有能够在无人的状态下在空中飞行的飞行装置。这样的飞行装置能够利用围绕垂直轴旋转驱动的转子的推力而在空中飞行。
3.作为飞行装置的应用领域,例如可以考虑运输领域、测量领域、摄影领域、农业领域等。在将飞行装置应用于这样的领域的情况下,在飞行装置上安装各种设备或药剂。
4.在考虑使飞行装置稳定地飞行的情况下,需要测量飞行装置输送的各种设备或药剂的重量。在专利文献1以及专利文献2中,记载有对飞行装置所具备的箱内的余量进行推定的发明。
5.在专利文献1中,具有作为重量测定装置的测力传感器。通过使用测力传感器,能够测定与空箱重量的重量差,能够检测农药喷洒中的附属箱的余量。因此,不使用流量计就能够检测农药的余量。
6.在专利文献2中,记载了取得气溶胶容器的内容物的余量信息的余量取得单元。在此,利用重量传感器检测气溶胶容器的内容物的余量信息。
7.现有技术文献
8.专利文献
9.专利文献1:(日本)特开2020-117203号公报
10.专利文献2:(日本)特开2020-142772号公报
11.但是,在上述的专利文献1以及专利文献2所记载的飞行装置中,从低成本地测量飞行装置输送的输送体的重量的观点出发,存在改良的余地。
12.具体而言,在专利文献1以及专利文献2所记载的发明中,为了检测箱内的余量,具备专用的测力传感器和重量传感器,因此有可能导致成本高。另外,作用于测力传感器和重量传感器的载荷,根据飞行装置的飞行状态有时也不能正确地反映箱内的余量,因此从正确地推定箱内的余量的观点出发,也存在改善的余地。
技术实现要素:
13.本发明是鉴于上述情况而提出的,其目的在于提供一种能够以简单的结构正确地测量输送体的重量的飞行装置。
14.本发明的飞行装置的特征在于,具备转子、马达、飞行传感器、电力转换部、运算控制部,并对输送体进行输送,所述转子通过旋转而产生用于使机体基座部悬浮的推力,所述马达旋转驱动所述转子,所述飞行传感器测量作用于所述机体基座部的物理量,所述运算控制部基于所述物理量,生成指示信号,以使所述机体基座部成为规定的位置姿态,所述电力转换部基于所输入的所述指示信号,调整供给到所述马达的电量,进而,所述运算控制部基于所述指示信号的大小,计算所述输送体的重量的推定值即推定重量。。
15.另外,在本发明的飞行装置中,特征在于,还具备喷洒装置,所述输送体是所述喷洒装置喷洒的药剂,所述运算控制部基于所述指示信号的大小,计算所述药剂的余量的推定值即推定余量。
16.另外,在本发明的飞行装置中,特征在于,具有多个所述转子、所述马达以及所述电力转换部,所述运算控制部生成输入到各个所述电力转换部的多个所述指示信号,进而,基于作为所述指示信号的平均值的指示信号平均值,推定所述输送体的推定重量。
17.另外,在本发明的飞行装置中,特征在于,还具备将电力供给到所述电力转换部的电池,所述运算控制部基于所述指示信号以及所述电池的电压值,计算所述推定重量。
18.另外,在本发明的飞行装置中,特征在于,表示所述推定重量的信号被传送到显示装置,在所述显示装置的显示部显示所述推定重量。
19.发明效果
20.本发明的飞行装置的特征在于,具备转子、马达、飞行传感器、电力转换部、运算控制部,并对输送体进行输送,所述转子通过旋转而产生用于使机体基座部悬浮的推力,所述马达旋转驱动所述转子,所述飞行传感器测量作用于所述机体基座部的物理量,所述运算控制部基于所述物理量,生成指示信号,以使所述机体基座部成为规定的位置姿态,所述电力转换部基于所输入的所述指示信号,调整供给到所述马达的电量,进而,所述运算控制部基于所述指示信号的大小,计算所述输送体的重量的推定值即推定重量。因此,根据本发明的飞行装置,能够根据为了使机体基座部成为规定的位置姿态而生成的指示信号来推定输送体的重量。因此,不需要专用的重量传感器就能够推定输送体的重量。
21.另外,在本发明的飞行装置中,特征在于,还具备喷洒装置,所述输送体是所述喷洒装置喷洒的药剂,所述运算控制部基于所述指示信号的大小,计算所述药剂的余量的推定值即推定余量。因此,根据本发明的飞行装置,能够实时地推定正在喷洒的药剂的余量。
22.另外,在本发明的飞行装置中,特征在于,具有多个所述转子、所述马达以及所述电力转换部,所述运算控制部生成输入到各个所述电力转换部的多个所述指示信号,进而,基于作为所述指示信号的平均值的指示信号平均值,推定所述输送体的推定重量。因此,根据本发明的飞行装置,通过基于指示信号平均值来推定输送体的推定重量,无论是悬停状态还是移动状态,都能够稳定地推定输送体的重量。
23.另外,在本发明的飞行装置中,特征在于,还具备将电力供给到所述电力转换部的电池,所述运算控制部基于所述指示信号以及所述电池的电压值,计算所述推定重量。因此,根据本发明的飞行装置,在计算推定重量时,除了考虑指示信号之外,还考虑电池的电压值,由此能够更正确地计算推定重量。
24.另外,在本发明的飞行装置中,特征在于,表示所述推定重量的信号被传送到显示装置,在所述显示装置的显示部显示所述推定重量。因此,根据本发明的飞行装置,例如,操作飞行装置的操作者能够实时地知道输送体的推定重量。
附图说明
25.图1是示出本发明的实施方式的飞行装置的图,(a)是示出飞行装置的俯视图,(b)是示出飞行装置的主视图。
26.图2是示出本发明的实施方式的飞行装置的连接结构的框图。
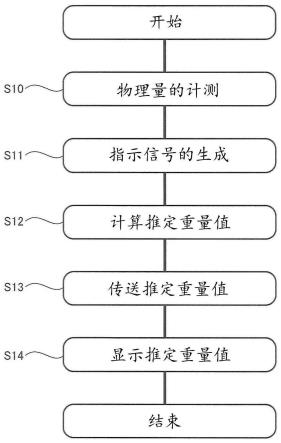
27.图3是示出在本发明的实施方式的飞行装置中计算输送体的推定重量值的方法的流程图。
28.图4是示出在本发明的实施方式的飞行装置中马达输出值以及喷洒状态的随时间的变化的曲线图。
29.图5是示出在本发明的实施方式的飞行装置中马达输出值以及飞行装置的移动速度的随时间的变化的曲线图。
30.附图标记说明
31.10飞行装置
32.11转子
33.111转子
34.112转子
35.113转子
36.114转子
37.12马达
38.121马达
39.122马达
40.123马达
41.124马达
42.13飞行传感器
43.14电力转换部
44.141 esc
45.142 esc
46.143 esc
47.144 esc
48.15运算控制部
49.16机体基座部
50.17飞行控制器
51.18喷洒装置
52.19支承臂
53.20药剂
54.21电池
55.22显示装置
56.23显示部
57.24配套控制器
58.25通信部
59.26通信部
60.271臂
61.272臂
62.273臂
63.274臂
64.28操纵机
65.29药剂箱
66.32脚部
67.33脚部
68.34支承臂
69.35喷嘴
70.36喷嘴
71.37管
具体实施方式
72.以下,参照附图对本实施方式的飞行装置10进行说明。在以下的说明中,对于相同的部件原则上标注相同的附图标记,省略重复的说明。另外,在以下的说明中,使用上下前后左右各方向,但左右是指在图1(a)中从前方观察飞行装置10的情况下的左右。
73.图1(a)是示出飞行装置10的俯视图,图1(b)是示出飞行装置10的主视图。
74.参照图1(a),飞行装置10主要具备机体基座部16、搭载于机体基座部16的在此未图示的动力部、从机体基座部16的周边部朝向周围延伸的臂部271等、配置在臂部271等的外侧端部的马达121等、通过马达121等旋转的转子111等。在以下的说明中,将马达121等统称为马达12,将转子111等统称为转子11。
75.飞行装置10使用从收纳在机体基座部16中的电池得到的电力,马达121等使转子111等以规定的转速旋转,能够在空中悬浮以及移动。在此,例示了用于向水田等田地喷洒农药的飞行装置10。
76.机体基座部16配置在飞行装置10的中央,在此收纳有未图示的各种设备。机体基座部16的外皮由成形为规定形状的合成树脂板或钢板覆盖。另外,储存后述的药剂20的药剂箱29内置于机体基座部16。
77.臂271、臂272、臂273以及臂274从电力转换器14朝向外侧延伸。
78.在臂271的外侧端部配置有马达121以及转子111。在臂272的外侧端部配置有马达122以及转子112。在臂273的外侧端部配置有马达123以及转子113。在臂274的外侧端部配置有马达124以及转子114。在此,转子111等通过旋转产生用于使机体基座部16悬浮的推力。另外,马达121等对转子111等进行旋转驱动。
79.作为储存在药剂箱29中的药剂20,可以采用液状农药、粒状农药等。
80.参照图1(b),在机体基座部16的下部,配设有在着陆时与地面接触的脚部32以及脚部33。脚部32以及脚部33是也被称为滑道的部件,在飞行装置10着陆的状态下,脚部32以及脚部33的下端与地面接触。
81.在机体基座部16的下方配置有用于喷洒药剂20的喷洒装置18。喷洒装置18内置有用于输送药剂20的泵。
82.另外,在脚部32连接有朝向右侧上方延伸的支承臂19,在支承臂19的上端设置有喷嘴36。同样,在脚部33连接有朝向左侧上方延伸的支承臂34,在支承臂34的上端设置有喷嘴35。喷嘴35以及喷嘴36和喷洒装置18经由管37连接。
83.喷洒装置18基于来自后述的操纵机28的指示,在喷洒开启状态的期间,使喷洒装置18的泵运转。通过这样,储存在药剂箱29中的药剂20通过喷洒装置18的压力,经由管37,从喷嘴35以及喷嘴36朝向下方喷雾。另一方面,基于来自后述的操纵机28的指示,在喷洒关闭状态的期间,不使喷洒装置18的泵运转,不从喷嘴35以及喷嘴36喷雾药剂20。
84.图2是示出飞行装置10的连接结构的框图。
85.飞行装置10主要具备马达121等、飞行传感器13、电力转换部14、运算控制部15,输送作为输送体的药剂20。进而,飞行设备10具有通信部25、电池21和电力转换部14。另外,操纵机28是操纵飞行装置10的操纵者在地面进行操作的操纵机。另外,通信部26、显示装置22以及显示部23设置在操纵者的附近。
86.飞行传感器13测量作用于机体基座部16的物理量,将表示该物理量的大小的信号传送到运算控制部15。作为包含在飞行传感器13中的传感器,例如是加速度传感器、角速度传感器、地磁传感器、气压传感器以及gnss天线。加速度传感器检测作为物理量的倾斜或运动的变化。角速度传感器检测作为物理量的倾斜或方向的变化。地磁传感器通过磁力来检测作为物理量的方向。气压传感器检测作为物理量的高度。gnss天线确定位置。
87.运算控制装置15具有由cpu(central processing unit,中央处理器)构成的运算装置、以及由ram(random access memory,随机存储器)或rom(read only memory,只读存储器)构成的存储装置,控制飞行装置10整体的动作。另外,运算控制部15如后所述,基于从飞行传感器13输入的指示信号,调整供给到马达121等的电量。进而,运算控制部15如后所述,基于指示信号的大小,计算输送体的药剂20的余量的推定值即推定余量。
88.运算控制部15具有飞行控制器17和配套控制器24。
89.飞行控制器17基于从飞行传感器13输入的信号,生成用于使飞行装置10的位置姿态以及移动速度等成为规定的指示信号。作为该指示信号,例如可以采用pwm控制中的占空比值。在本实施方式中,由于具有四个马达121、马达122、马达123以及马达124,因此对各个马达121计算占空比值。
90.配套控制器24基于从飞行控制器17输入的信息,例如从飞行传感器13输入的信息、表示电池21的电压的信息等,计算药剂20的推定余量。
91.电力转换部14具有esc141至esc144。在此,esc是electric speed controller(电子速度控制器)的缩写,是控制马达12的转速的电子装置。esc141配置在马达121和运算控制部15之间,控制马达121的转速。esc142配置在马达122和运算控制部15之间,控制马达122的转速。esc143配置在马达123和运算控制部15之间,控制马达123的转速。esc144配置在马达124和运算控制部15之间,控制马达124的转速。如果从飞行控制器17输入的占空比值大,则esc141至esc144使马达121至124高速地旋转。
92.在此,对飞行装置10的基本的飞行动作进行说明。飞行装置10能够执行上升动作、悬停动作、移动动作以及下降动作中的各动作。飞行装置10的动作基于命令,由飞行控制器17执行,该命令基于操作者的操作而从操纵机28传送。
93.在上述各动作中,飞行控制器17基于从包含在飞行传感器13中的加速度传感器以及角速度传感器输入的信息,调整马达121至马达124的转速,以使飞行装置10的姿态成为规定姿态。
94.在上升动作中,飞行控制器17使马达12较高速地旋转,以使飞行装置10上升到规
定高度。飞行控制器17基本上将大致相同的占空比值输出到esc141至esc144,使马达121至马达124的转速大致相同。另外,飞行控制器17基于从包含在飞行传感器13中的气压传感器输入的信息,在飞行装置10上升到规定高度后,执行将飞行装置10的高度保持为大致恒定的悬停动作。
95.在悬停动作中,飞行控制器17基于从包含在飞行传感器13中的气压传感器输入的信息,调整马达121至马达122的转速,以使飞行装置10的高度为大致恒定。在此,飞行控制器17基本上将大致相同的占空比值输出到esc141至esc144,使马达121至马达124的转速大致相同。
96.在移动动作中,飞行控制器17调整马达121至马达124的转速,以使飞行装置10能够朝向前后左右各方向以规定速度移动。例如,使马达121以及马达122的转速比马达123以及马达124的转速快。即,飞行控制器17使输出到esc141以及esc142的占空比值比输出到esc143以及esc144的占空比值大。通过这样,参照图1(a),转子111以及转子112比转子113以及转子114更高速地旋转,飞行装置10的机体基座部16成为倾斜姿态,飞行装置10朝向规定的方向移动。
97.之后,如果基于包含在飞行传感器13中的gnss天线等的输出,识别出飞行装置10到达了规定位置,则飞行控制器17执行制动动作。例如,飞行控制器17使马达121以及马达122的转速比马达123以及马达124的转速慢。即,飞行控制器17使输出到esc143以及esc144的占空比值比输出到esc141以及esc142的占空比值大。通过这样,参照图1(a),转子111以及转子112比转子113以及转子114更低速地旋转,能够停止飞行装置10的平面的移动。之后,飞行控制器17执行悬停动作。
98.在下降动作中,飞行控制器17使马达12较低速地旋转,以使飞行装置10下降到规定高度。飞行控制器17基本上将大致相同的占空比值输出到esc141至esc144,使马达121至马达124的转速大致相同。另外,飞行控制器17基于从包含在飞行传感器13中的气压传感器输入的信息,在飞行装置10下降到规定高度后,执行将飞行装置10的高度保持为大致恒定的悬停动作。
99.图3是示出在飞行装置10中计算作为输送体的药剂20的推定余量的方法的流程图。
100.在步骤s10中,飞行传感器13测量物理量。具体而言,包含在飞行传感器13中的加速度传感器、角速度传感器、地磁传感器、气压传感器以及gnss天线等测量飞行装置10的位置姿态等。飞行传感器13测量的物理量被输入到飞行控制器17。另外,飞行装置10的飞行时的动作状况也被输入到飞行控制器17。
101.在步骤s11中,基于前述的物理量,飞行控制器17计算作为指示信号的占空比值。飞行控制器17基于在步骤s10中输入的各种信息以及动作状况等,输出占空比值。飞行控制器17针对图2所示的esc141至esc144的每一个计算占空比值。
102.在此,占空比值还根据包括药剂20的飞行装置10的重量而变化。即,在进行农药喷洒时,为了对稻子等植物有效地喷洒农药,需要将飞行装置10的高度保持为大致相同。另外,在农药喷洒的初期时,由于药剂20的重量重,因此飞行控制器17选出的占空比值比较大。另一方面,如果农药喷洒进行,则药剂20的重量减轻,因此飞行控制器17选出的占空比值比较小。
103.在此,飞行控制器17为了在之后的步骤中正确地推定药剂20的重量,也可以对针对esc141至esc144的每一个计算的占空比值进行平均。针对esc141至esc144的每一个计算的占空比值根据飞行装置10的姿态和飞行状态而变化。因此,通过计算作为这4个占空比值的平均值的占空比平均值(指示信号平均值),能够排除姿态或飞行状态的影响。因此,如后所述,无论飞行装置10处于哪种飞行状态,都能够根据占空比值的平均值正确地计算药剂20的推定余量。计算出的占空比平均值被输入到配套控制器24。
104.在步骤s12中,配套控制器24计算作为推定重量值的药剂20的推定余量。具体而言,配套控制器24读取占空比平均值和作为电池21的电压值的电池电压值。然后,基于以占空比平均值以及电池电压值为变量的规定的函数,计算药剂20的推定余量。
105.在本实施方式中,考虑占空比平均值以及电池电压值,计算药剂20的推定余量。其原因在于,在电池电压值变低的情况下,飞行控制器17为了使马达12以规定的转速旋转而增大占空比值。因此,随着使用飞行装置10的药剂20的喷洒进行,占空比值逐渐变大,因此,当仅使用占空比值作为变量来计算药物20的推定余量时,推定余量可能被过大地计算。因此在本实施方式中,通过利用电池电压值修正占空比值,正确地计算出药剂20的推定余量。
106.在步骤s13中,配套控制器24以及飞行控制器17传送表示药剂20的推定余量的信息。具体而言,表示药剂20的推定余量的信息通过无线通信,经由通信部25以及操纵机28,从飞行装置10传送到显示装置22。
107.在步骤s14中,在显示装置22的显示部23上显示药剂20的推定余量。操纵者通过目视确认显示部23,能够得知药剂20的推定余量。因此,如果药剂20的推定余量为一定以下,则操纵者能够使飞行装置10移动到规定位置,补充药剂20。
108.图4是示出在飞行装置10中,马达输出值以及喷洒状态的随时间的变化的曲线图。该曲线图的横轴表示经过时间,纵轴表示马达输出(占空比值)以及喷洒开关的开启关闭状态。在此,在喷洒开关为开启状态时,从喷洒装置18喷洒药剂20。另一方面,在喷洒开关为关闭状态时,不从喷洒装置18喷洒药剂20。
109.在此,示出了为了使飞行装置10具备的四个马达121至马达124旋转而从飞行控制器17输出到esc141至esc144的每一个的占空比值。用实线表示输出到esc141的占空比值,用虚线表示输出到esc142的占空比值,用单点划线表示输出到esc143的占空比值,用双点划线表示输出到esc144的占空比值。另外,喷洒开关的开启关闭状态用实线表示。
110.在该曲线图中,在喷洒开关为开启状态的期间,输入到esc141至esc144的占空比值随着时间的经过而逐渐变小。另一方面,在喷洒开关为关闭状态的期间,输入到esc141至esc144的占空比值不变化。表示这样的现象的原因在于,在喷洒开关为开启状态的期间,药剂20的余量逐渐减少,将飞行装置10的高度保持为恒定所需的占空比值减小。因此,可以理解,占空比值的减少量与药剂20的减少量正相关,能够从占空比值推定药剂20的余量。
111.图5是示出在飞行装置10中,马达输出值以及飞行装置10的移动速度的随时间的变化的曲线图。该曲线图的横轴表示经过时间,纵轴表示飞行装置10的俯仰操作(前进后退操作)以及马达平均输出(占空比平均值)。另外,用实线表示俯仰操作,用虚线表示马达平均输出。
112.参照该图,通过操纵者操作操纵机28,飞行装置10能够进行前进、制动以及后退。在飞行装置10喷洒农药时,重复这样的操作。在飞行装置10执行前进、制动以及后退时,从
飞行控制器17输入到esc141至esc144的每一个的占空比值各自较大地变化。
113.另一方面,用虚线表示的占空比平均值虽然表示若干变动,但在前进、制动以及后退的各动作中未发现大的变动。由此,通过基于占空比平均值推定药剂20的余量,能够不依赖于飞行装置10的动作状况,稳定且正确地推定药剂20的余量。
114.通过前述的本实施方式,能够起到如下的主要效果。
115.根据本发明的飞行装置10,能够根据为了使机体基座部16成为规定的位置姿态而生成的指示信号来推定输送体的重量。因此,不需要专用的重量传感器就能够推定输送体的重量。
116.另外,由于总是能够根据占空比平均值计算药剂20的余量,因此能够实时地推定正在喷洒的药剂20的余量。
117.另外,通过基于占空比平均值来计算药剂20的推定重量,无论是悬停状态还是移动状态,都能够稳定地计算药剂20的推定重量。
118.另外,在计算药剂20的推定重量时,除了考虑占空比平均值之外,还考虑电池21的电压值,由此能够更正确地计算推定重量。
119.以上,对本发明的实施方式进行了说明,但本发明不限定于此,能够在不脱离本发明的主旨的范围内进行变更。另外,前述的各方式能够相互地组合。
120.在图1中,作为飞行装置10,例示了仅以电池作为能量源的电动式无人机,但也可以采用使用发动机以及电池作为能量源的混合型无人机。
121.在前述的实施方式中,基于占空比平均值计算药剂20的推定余量,但也可以使用未平均化的占空比值来计算推定余量。例如,也能够使用任意一个占空比值、占空比值的中央值等来计算推定余量。
122.在前述的实施方式中,基于占空比平均值以及电池电压值计算药剂20的推定余量,但也可以仅使用占空比平均值来计算推定余量。
123.在前述的实施方式中,根据占空比值推定作为输送体的药剂20的余量,但作为输送体也可以采用药剂20以外的物体。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1