一种飞行姿态模拟试验台的控制方法与流程
1.本发明涉及航空飞行技术领域,特别是涉及一种飞行姿态模拟试验台的控制方法。
背景技术:
2.自转旋翼机适航标准astm2352条款“7.7.3.2在燃油液面指示器或者指示装置上必须确定并且标识不可用燃油量,且需包括:4.1.4规定的旋翼机空重中。注20
–
在poh中必须规定不可用燃油量。”以及“9.7.3油量指示器
–
每个油量指示器均需校准水平飞行期间的零读数,即油箱剩余油量等于按7.7.3确定的不可用数量。”明确规定了适航取证过程中必须测定飞机的不可用燃油量并且在飞机的飞行员操作手册(poh)中明确规定,同时在飞机总检交付客户之前必须校准。其他固定翼或者旋翼类轻型运动型飞机也有类似的要求,这就使得在适航取证和飞机生产制造过程中亟需一种快速、准确测量标定不可用燃油量的方法。不可用燃油量要求对飞机的所有飞行姿态进行测量,国内目前一般采用将飞机约束在桁架内,采用伺服电机或者液压马达驱动飞机旋转的方法进行飞行姿态模拟,这种方法的缺点是对飞机的重量、姿态角度有限制,一般重量不能超过500公斤,滚转姿态角不超过45度。这不能满足公司jro自转旋翼机适航取证的要求。
技术实现要素:
3.本发明的目的是提供一种飞行姿态模拟试验台的控制方法,以解决上述现有技术存在的问题。
4.为实现上述目的,本发明提供了如下方案:本发明提供一种飞行姿态模拟试验台的控制方法,包括如下步骤:
5.步骤一:将试验飞机安装在试验台上,在姿态角控制转换系统中对试验飞机将所需要的姿态角转换为所述试验台内的旋转变位系统的旋转角度;
6.步骤二:将步骤一所得所述旋转变位系统的旋转角度输入到所述旋转变位系统内;
7.步骤三:所述旋转变位系统通过所述试验台内的约束台架系统带动试验飞机进行旋转,形成所述试验飞机的各种飞行姿态;
8.步骤四:安装在所述试验飞机上的姿态测量系统测量所述试验飞机的实际姿态,并将测量结果反馈到显示屏幕上。
9.优选的,所述旋转变位系统用于控制所述试验飞机进行调整姿态;所述约束台架系统用于对所述试验飞机进行固定;
10.所述旋转变位系统设置在所述约束台架系统内,所述约束台架系统顶部与所述试验飞机底部可拆卸连接,所述约束台架系统底部与底面固接,所述姿态角控制转换系统与所述旋转变位系统电性连接,所述姿态测量系统设置在所述试验飞机上。
11.优选的,所述约束台架系统试验台架和飞机支架;
12.所述试验台架的底面与地面通过螺栓连接,所述试验台架的顶面与所述旋转变位系统通过螺栓连接,所述旋转变位系统顶部与所述飞机支架底部通过螺栓连接。
13.优选的,所述旋转变位系统包括变位机和控制电路;
14.所述二轴变位机的底部与所述试验台架通过螺栓连接,所述二轴变位机顶部与所述飞机支架通过螺栓连接,所述姿态角控制转换系统通过所述控制电路对所述二轴变位机进行角度控制。
15.优选的,所述姿态角控制转换系统包括三维设计软件和姿态角转换程序;
16.所述三维设计软件用于对所述试验飞机进行姿态模拟,所述姿态角转换程序将所述试验飞机进行姿态模拟角度转化为所述二轴变位机两轴的转动角度。
17.优选的,所述姿态测量系统包括测量传感器和传输软件;
18.所述测量传感器设置在所述试验飞机上,所述测量传感器与所述传输软件电性连接,所输送传输软件用于将所述测量传感器反馈到所述显示屏幕上。
19.优选的,在步骤一中,首先设计员根据需要模拟的飞行姿态角,在所述三维设计软件上进行三维运动模拟,用所述姿态角转换程序计算出所述二轴变位机出轴a和轴b需要旋转的角度,将其传达给变位机操作员。
20.优选的,在步骤二中,变位机操作员开始由步骤一中所得数据按照轴a和轴b的角度,采用分步逐次逼近的方法操作所述二位变位机进行旋转,天车操作员根据天车和所述试验飞机位置关系操作天车,确保所述试验飞机安全。
21.优选的,在步骤三中,记录员监控显示屏幕上的姿态角数值,如果到达需要模拟的飞机姿态值的公差范围内,则报数并指示所述二位变位机操作员停止操作。
22.优选的,在步骤四中,设计员对显示屏幕上的姿态角数值进行确认,确认无误后进行下一个飞行姿态的模拟。
23.本发明公开了以下技术效果:本发明增大了飞机姿态模拟的控制范围,使得轻型运动类飞机大姿态角模拟成为可能。改变了姿态角的控制方式,为飞机姿态角的控制提供了全新的思路。使得姿态角的控制设备选择灵活性大大增加,成本进一步降低,控制效果可以在姿态角控制转换系统上面进行模拟,方便了随时改进设计和控制方法。试验台的功能模块可以拆卸单独使用,增加了设备的经济性。
附图说明
24.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
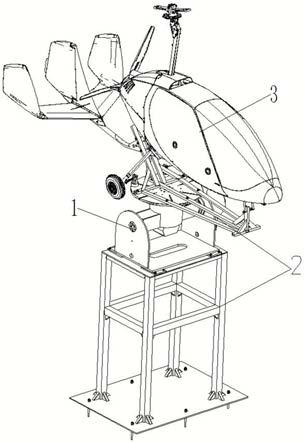
25.图1为本发明的结构示意图;
26.图2为本发明的控制流程图;
27.图3为本发明姿态测量系统的工作流程图;
28.其中,1、旋转变位系统;2、约束台架系统;3、试验飞机。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
31.本发明提供一种飞行姿态模拟试验台的控制方法,包括如下步骤:
32.步骤一:将试验飞机3安装在试验台上,在姿态角控制转换系统中对试验飞机3将所需要的姿态角转换为试验台内的旋转变位系统1的旋转角度;
33.步骤二:将步骤一所得旋转变位系统1的旋转角度输入到旋转变位系统1内;
34.步骤三:旋转变位系统1通过试验台内的约束台架系统2带动试验飞机3进行旋转,形成试验飞机3的各种飞行姿态;
35.步骤四:安装在所述试验飞机3上的姿态测量系统测量所述试验飞机3的实际姿态,并将测量结果反馈到显示屏幕上。
36.本发明增大了飞机姿态模拟的控制范围,使得轻型运动类飞机大姿态角模拟成为可能。改变了姿态角的控制方式,为飞机姿态角的控制提供了全新的思路。使得姿态角的控制设备选择灵活性大大增加,成本进一步降低,控制效果可以在姿态角控制转换系统上面进行模拟,方便了随时改进设计和控制方法。试验台的功能模块可以拆卸单独使用,增加了设备的经济性。
37.进一步优化方案,旋转变位系统用于控制试验飞机3进行调整姿态;约束台架系统2用于对试验飞机3进行固定;
38.所述旋转变位系统1设置在所述约束台架系统2内,所述约束台架系统2顶部与所述试验飞机3底部可拆卸连接,所述约束台架系统2底部与底面固接,所述姿态角控制转换系统与所述旋转变位系统1电性连接,所述姿态测量系统设置在所述试验飞机3上。
39.在本发明的描述中,飞机姿态角的定义根据“gbt 14410.1-2008飞行力学概念、量和符号第1部分:坐标轴系和运动状态变量”,包括俯仰角-90
°
至+90
°
)滚转角-90
°
至+90
°
)、偏航角0
°
至360
°
)。
40.进一步优化方案,所述约束台架系统2试验台架和飞机支架;
41.所述试验台架的底面与地面通过螺栓连接,所述试验台架的顶面与所述旋转变位系统1通过螺栓连接,所述旋转变位系统1顶部与所述飞机支架底部通过螺栓连接。
42.进一步优化方案,所述旋转变位系统包括变位机和控制电路;
43.所述二轴变位机的底部与所述试验台架通过螺栓连接,所述二轴变位机顶部与所述飞机支架通过螺栓连接,所述姿态角控制转换系统通过所述控制电路对所述二轴变位机进行角度控制。
44.上述的姿态角控制转换系统是首先在catia装配模块中建立试验台架和飞机的三维装配数模,建立必要的装配约束,使其自由度为零。然后运行本转换程序,输入需要模拟的姿态角。转换程序将姿态角输入转换为catia装配约束的数值,并且根据需要对装配约束进行激活、更新操作。程序运行结束后输出变位机1轴、2轴的旋转角度值。
45.二轴变位机的设置增大了飞机姿态模拟的控制范围,使得本试验台可以对不超过1吨的固定翼、旋翼类轻型飞机进行姿态模拟,角度范围覆盖俯仰角-80至+80度、滚转角-90度至+90度。
46.进一步优化方案,所述姿态角控制转换系统包括三维设计软件和姿态角转换程序;
47.所述三维设计软件用于对所述试验飞机3进行姿态模拟,所述姿态角转换程序将所述试验飞机3进行姿态模拟角度转化为所述二轴变位机两轴的转动角度。
48.改变了姿态角的控制方式,将姿态角从直接控制变成了间接控制,使得姿态角的控制灵活性大大增加,也有利于本系统借鉴利用现有成品设备。
49.试验台的功能模块可以拆卸单独使用。例如旋转变位系统1可以作为焊接变位机使用。
50.设置的三维设计软件为catia,这样的设置使控制效果可以在三维设计软件catia上面进行模拟,方便了随时改进设计和控制方法。
51.进一步优化方案,所述姿态测量系统包括测量传感器和传输软件;
52.所述测量传感器设置在所述试验飞机3上,所述测量传感器与所述传输软件电性连接,所输送传输软件用于将所述测量传感器反馈到所述显示屏幕上。
53.进一步优化方案,在步骤一中,首先设计员根据需要模拟的飞行姿态角,在所述三维设计软件上进行三维运动模拟,用所述姿态角转换程序计算出所述二轴变位机出轴a和轴b需要旋转的角度,将其传达给变位机操作员。
54.进一步优化方案,在步骤二中,变位机操作员开始由步骤一中所得数据按照轴a和轴b的角度,采用分步逐次逼近的方法操作所述二位变位机进行旋转,天车操作员根据天车和所述试验飞机3位置关系操作天车,确保所述试验飞机3安全。
55.进一步优化方案,在步骤三中,记录员监控显示屏幕上的姿态角数值,如果到达需要模拟的飞机姿态值的公差范围内,则报数并指示所述二位变位机操作员停止操作。
56.进一步优化方案,在步骤四中,设计员对显示屏幕上的姿态角数值进行确认,确认无误后进行下一个飞行姿态的模拟。
57.在本发明的描述中,需要理解的是,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
58.以上的实施例仅是对本发明的优选方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1