智能化配煤系统与方法与流程
1.本发明属于配煤程控技术领域,具体涉及一种智能化配煤系统以及一种智能化配煤方法。
背景技术:
2.目前,国内配煤方式基本上是通过人工现场操作,而现场工作环境恶劣,存在高粉尘污染,对长时间操作人员身体产生的伤害较大,同时多台设备操作又需要多人参与沟通,缺乏统一信息及时准确传递,而且控制画面大多还是传统的二维画面抽象,对于不熟悉现场的工作人员来说无法快速操作控制系统,影响整个堆取煤系统的安全与正常运行。
3.针对上述问题,本发明提出一种智能化配煤系统及方法。
技术实现要素:
4.本发明旨在至少解决现有技术中存在的技术问题之一,提供一种智能化配煤系统与一种智能化配煤方法。
5.本发明的一方面,提供一种智能化配煤系统,用于堆取机械设备,所述智能化配煤系统包括:定位子系统、激光扫描子系统、以及控制子系统,所述激光子系统分别与所述定位子系统和所述控制子系统电连接;其中,
6.所述定位子系统,用于定位多个煤场物料的位置,以得到位置信息数据;
7.所述激光扫描子系统,用于根据所述位置信息数据生成控制算法;
8.所述控制子系统,用于根据所述控制算法控制多台所述堆取机械设备以对所述多个煤场物料进行智能化配煤处理。
9.可选的,所述激光扫描子系统包括第一数据库、三维模型以及算法生成模块;其中,
10.所述第一数据库,用于接收并存储所述位置信息数据;
11.所述三维模型,用于对所述位置信息数据进行渲染显示;同时,
12.所述算法生成模块,用于根据所述位置信息数据在所述第一数据库中生成控制算法。
13.可选的,所述三维模型由所述第一数据库搭建形成。
14.可选的,所述控制子系统包括读取模块、指令生成模块以及控制模块;其中,
15.所述读取模块,所述读取模块用于读取所述控制算法;
16.所述指令生成模块,用于根据所述控制算法生成执行指令;
17.所述控制模块,根据所述执行指令控制多台所述堆取机械设备对所述多个煤场物料进行统一智能化配煤处理。
18.可选的,所述控制子系统还包括第二数据库,所述第二数据库用于存储所述执行指令。
19.可选的,所述智能化配煤系统还包括第一信息管理接口;
20.所述第一信息管理接口的输入端与所述定位子系统的输出端电连接,所述第一信息管理接口的输出端与所述激光扫描子系统的输入端电连接。
21.可选的,所述智能化配煤系统还包括第二信息管理接口;
22.所述第二信息管理接口的输入端与所述激光扫描子系统的输出端电连接,所述第二信息管理接口的输出端与所述控制子系统的输入端电连接。
23.本发明的另一方面,提供一种智能化配煤方法,具体包括以下步骤:
24.定位多个煤场物料的位置,以得到位置信息数据;
25.根据所述位置信息数据生成控制算法;
26.根据所述控制算法控制多台所述堆取机械设备以对所述多个煤场物料进行智能化配煤处理。
27.可选的,所述根据所述位置信息数据生成控制算法,包括:
28.接收并存储所述位置信息;
29.对所述位置信息数据进行渲染显示;同时,
30.根据所述位置信息数据生成控制算法。
31.可选的,所述根据所述控制算法控制多台所述堆取机械设备的执行指令以对所述多个煤场物料进行智能化配煤处理,包括:
32.读取所述控制算法;
33.根据所述控制算法生成执行指令;
34.根据所述执行指令控制多台所述堆取机械设备对所述多个煤场物料进行统一智能化配煤处理。
35.本发明的智能化配煤系统包括定位子系统、激光扫描子系统、以及控制子系统,通过三个子系统相互配合,以实现对不同煤场的信息整合,并控制多台堆取机械设备对多个煤场物料进行统一智能化配煤处理,解决了现有技术中存在的物料管理效率低下以及多人同时作业,沟通环节冗余拖沓等问题,进而达到了减员增效,并提高了配煤处理效率。
附图说明
36.图1为本发明一实施例的智能化配煤系统的结构示意图;
37.图2为本发明另一实施例的智能化配煤示意图;
38.图3为本发明另一实施例的智能化配煤方法的流程框图。
具体实施方式
39.为使本领域技术人员更好地理解本发明的技术方案,下面结合附图和具体实施方式对本发明作进一步详细描述。显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于所描述的本发明的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护范围。
40.除非另外具体说明,本发明中使用的技术术语或者科学术语应当为本发明所属领域内具有一般技能的人士所理解的通常意义。本发明中使用的“包括”或者“包含”等既不限定所提及的形状、数字、步骤、动作、操作、构件、原件和/或它们的组,也不排除出现或加入一个或多个其他不同的形状、数字、步骤、动作、操作、构件、原件和/或它们的组。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示技术特征的数量与顺序。
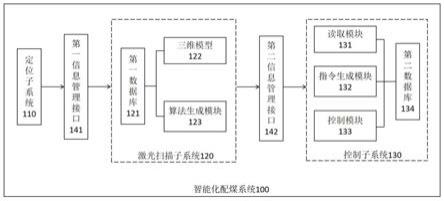
41.如图1所示,本发明的一方面,提供一种智能化配煤系统100,用于堆取机械设备,该智能化配煤系统100包括:定位子系统110、激光扫描子系统120、以及控制子系统130,激光扫描子系统120分别与定位子系统110和控制子系统130电连接。其中,定位子系统110,用于定位多个煤场物料的位置,以得到位置信息数据。激光扫描子系统120,用于根据位置信息数据生成控制算法。控制子系统130,用于根据控制算法控制多台堆取机械设备以对多个煤场物料进行智能化配煤处理。
42.本实施例通过三个子系统相互配合,以实现对不同煤场的信息整合,并控制多台堆取机械设备对多个煤场物料进行统一智能化配煤处理,解决了现有技术中存在的物料管理效率低下以及多人同时作业,沟通环节冗余拖沓等问题,进而达到了减员增效,并提高了配煤处理效率。
43.需要说明的是,本示例对于多台堆取机械设备以多个煤场的数量不作具体限定,例如,可以利用三台堆取机械设备对三个煤场的物料进行智能化配煤处理,当然,还可以利用两台堆取机械设备对三个煤场的物料进行智能化配煤处理。
44.进一步需要说明的是,本示例对于定位子系统以及控制子系统不作具体限定,例如,可以采用gps定位子系统,控制子系统采用plc控制子系统。
45.仍需要说明的是,本示例对于堆取机械设备也不作具体限定,例如,斗轮机。也就是说,本示例的智能化配煤系统可以装配在斗轮机上,对斗轮机进行智能控制,以实现通过斗轮机对煤场物料的处理。
46.仍需要说明的是,本示例对于定位子系统、激光扫描子系统、控制子系统之间的的电连接方式不作具体限定,可以直接进行电连接,也可以通过其他元件进行电连接。
47.具体的,如图1所示,本示例的智能化配煤系统100还包括第一信息管理接口141与第二信息管理接口142,其中,该第一信息管理接口141的输入端与定位子系统110的输出端电连接,第一信息管理接口141的输出端与激光扫描子系统120的输入端电连接。第二信息管理接口142的输入端与激光扫描子系统120的输出端电连接,第二信息管理接口142的输出端与控制子系统130的输入端电连接。即本示例的第一信息管理接口与第二信息管理接口形成信息管理系统,以通过上述各接口进行信息传输。例如,通过卫星定位数据通讯和各信息管理接口向激光扫描子系统和控制子系统发送数据。
48.具体的,如图1所示,激光扫描子系统120包括第一数据库121、三维模型122以及算法生成模块123;其中,第一数据库121,用于接收并存储位置信息数据;三维模型122,用于对位置信息数据进行渲染显示;同时,算法生成模块123,用于根据位置信息数据在第一数据库中生成控制算法。也就是说,激光扫描子系统通过定位子系统的接收不同煤场物料的位置信息,并对第一数据库进行实时更新,三维模型在基于更新的数据进行渲染显示,可以有效反映煤场物料场景。
49.需要说明的是,本示例的三维模型由第一数据库搭建形成,也就是说,本示例的三维模型是能够提供煤场物料信息的三维模型。
50.进一步的,如图1所示,控制子系统130包括读取模块131、指令生成模块132以及控制模块133;其中,读取模块131,读取模块用于读取控制算法。指令生成模块132,用于根据
控制算法生成执行指令。控制模块133,根据执行指令控制多台堆取机械设备对多个煤场物料进行统一智能化配煤处理。
51.更进一步的,如图1所示,本示例的控制子系统130还包括第二数据库134,该第二数据库134用于存储执行指令。
52.应当理解的是,基于本示例上述第二信息管理接口实现第一数据库和第二数据库之间数据的传输。
53.本示例基于执行指令控制物料传输设备和物料堆取机械设备对物料进行管理,解决了现有技术中存在的物料管理效率低下以及多人同时作业,沟通环节冗余拖沓的问题,进而达到了减员增效的效果。
54.基于上述结构,对于不同煤场物料的智能化处理过程如下,一并结合图1和图2所示,采用两台堆取机械设备(例如,斗轮机)同时对三个煤场进行智能化处理,具体的,在该设备中增加上述智能化配煤系统,通过定位子系统110得到煤场位置信息数据,并将实时采集煤场物料的位置信息数据提供给激光扫描子系统120中的三维模型系统,以使三维模型系统对煤场物料的位置信息数据进行渲染显示。再通过控制子系统130执行一号斗轮机和二号斗轮机的统一指令控制来对不同煤场(一号煤场、二号煤场以及三号煤场)的物料进行统一智能化处理。本示例由可以自动的控制多台斗轮机对不同煤场物料进行配煤智能处理,而无需人工处理物料,提高物料处理的精度,此外,本示例中的三维模型系统是能够提供煤场物料三维模型,因此,可以有效地反映煤场物料场景,解决了现有技术中存在的物料管理效率低下的问题,进而达到了提高物料管理效率的效果。
55.需要说明的是,本实施例对于煤场的宽度、长度,以及斗轮机的行走轨道宽度、旋转角度等均不作具体限定,例如,本示例的斗轮机可以旋转角度范围为0
°
~110
°
,斗轮机的行走轨道宽度为12。另外,煤场的宽度为78、56.5等,煤场的长度为58。当然,对于本领域技术人员来说,还可以设置其他长度与宽度的煤场。
56.如图3所示,本发明的另一方面,提供一种智能化配煤方法s200,具体包括以下步骤s210~s230:
57.s210、定位多个煤场物料的位置,以得到位置信息数据。
58.具体的,可以利用上述智能化配煤系统进行智能化配煤处理,例如,可以采用gps定位子系统定位多个煤场物料的位置。
59.s220、根据位置信息数据生成控制算法。
60.具体的,通过接收模块接收并存储上述煤场物料的位置信息,再利用激光扫描子系统中的三维模型对位置信息数据进行渲染显示;同时,算法生成模块根据位置信息数据生成控制算法。
61.s230、根据控制算法控制多台堆取机械设备以对多个煤场物料进行智能化配煤处理。
62.具体的,利用读取模块读取步骤s220中生成的控制算法,再利用指令生成模块根据控制算法生成执行指令,之后,控制模块再根据执行指令控制多台堆取机械设备对多个煤场物料进行统一智能化配煤处理。
63.本发明提供的智能化配煤方法可以对不同煤场信息进行整合,根据煤场物料的具体位置,控制多台斗轮机同时进行统一的智能配煤处理,无需多人同时作业,提高了物料管
理效率低下的问题。
64.本发明提供一种智能化配煤系统与方法,相对于现有技术来说,本发明的智能化配煤系统包括定位子系统、激光扫描子系统、以及控制子系统,通过三个子系统相互配合,以实现对不同煤场的信息整合,并控制多台堆取机械设备对多个煤场物料进行统一智能化配煤处理,解决了现有技术中存在的物料管理效率低下以及多人同时作业,沟通环节冗余拖沓等问题,进而达到了减员增效,并提高了配煤处理效率。
65.可以理解的是,以上实施方式仅仅是为了说明本发明的原理而采用的示例性实施方式,然而本发明并不局限于此。对于本领域内的普通技术人员而言,在不脱离本发明的精神和实质的情况下,可以做出各种变型和改进,这些变型和改进也视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1