一种能够稳定越障的机器人及控制方法与流程
1.本发明涉及机器人技术领域,尤其涉及一种能够稳定越障的机器人及控制方法。
背景技术:
2.在现有技术领域,履带式机器人往往采用双履带的设计,该种设计的问题在于双履带结构往往难以进行转向,在较为狭窄复杂的地形难以根据指令实现有效移动,难以应对抢险救灾等复杂地貌,适用性较差,因此亟待一种适用性能良好的机器人结构予以改进;此外,履带式机器人在越障的过程中,往往因为侧翻后无法进行自行调整而必须人为进行外力干涉,当其应用于部分危险场景时会增加使用人员的安全风险。
技术实现要素:
3.针对现有技术中存在的上述问题,现提供一种能够稳定越障的机器人及控制方法。
4.具体技术方案如下:
5.本发明包括一种能够稳定越障的机器人,其中包括:
6.一头部,所述头部内设置一环境检测模组,所述环境检测模组用于实时获取外部的环境信息;
7.一主躯体,设置于所述头部的下部,所述主躯体内设置一侧翻检测模组,所述侧翻检测模组用于实时检测所述机器人的运行情况;
8.所述主躯体内还设置一中控模组,分别连接所述环境检测模组与所述侧翻检测模组,所述中控模组根据实时获取的外部的所述环境信息进行分析处理,以输出相应的一第一控制信号,并当所述侧翻检测模组检测到所述机器人发生侧翻时输出一第二控制信号;
9.两条前爬肢,分别设置于所述主躯体的两侧靠近前部处,根据所述第一控制信号进行运动;
10.所述主躯体的两侧分别设置一支撑杆,用于根据所述第二控制信号辅助所述机器人以进行姿态调整;
11.两条后爬肢,分别设置于所述主躯体的两侧靠近后部处,根据所述第一控制信号进行运动。
12.优选的,所述环境检测模组为雷达扫描仪,用以实时获取外部的所述环境信息。
13.优选的,所述侧翻检测模组为imu传感器,用以实时检测所述机器人的身体姿态。
14.优选的,所述主躯体通过一电机或内燃机带动所述前爬肢与所述后爬肢爬行运动。
15.优选的,所述前爬肢与所述后爬肢均为7轴传动结构。
16.优选的,所述前爬肢与所述后爬肢独立工作。
17.优选的,所述中控模组还包括一报警装置,当所述侧翻检测模组检测到所述机器人发生侧翻时输出一报警信号。
18.本发明还包括一种能够稳定越障的机器人的控制方法,其中,用于上述任一所述的能够稳定越障的机器人,其特征在于,所述控制方法包括以下步骤:
19.步骤s1、采用一环境检测模组,以实时获取外部的环境信息;
20.步骤s2、采用一侧翻检测模组,以实时检测所述机器人的运行情况;
21.步骤s3、采用一中控模组,根据实时获取的外部的所述环境信息进行分析处理,以输出相应的一第一控制信号,并当所述侧翻检测模组检测到所述机器人发生侧翻时输出一第二控制信号;
22.步骤s4、采用两条后爬肢,以根据所述第一控制信号进行运动;
23.步骤s5、采用两条前爬肢,以根据所述第二控制信号进行运动;
24.步骤s6、采用一支撑杆,以根据所述第二控制信号辅助所述机器人以进行姿态调整。
25.优选的,于所述步骤s3中,采用一报警装置,当所述侧翻检测模组检测到所述机器人发生侧翻时输出一报警信号。
26.优选的,于所述步骤s4、所述步骤s5及所述步骤s6中,采用一电机或内燃机驱动所述前爬肢、所述后爬肢及所述支撑杆运动。
27.本发明的技术方案有益效果在于:提供一种能够稳定越障的机器人及控制方法,能够在复杂狭窄的环境下运行,且在侧翻时能够自动调整,减少外力干涉,当应用于部分危险场景时,能够降低使用人员的安全风险。
附图说明
28.参考所附附图,以更加充分的描述本发明的实施例。然而,所附附图仅用于说明和阐述,并不构成对本发明范围的限制。
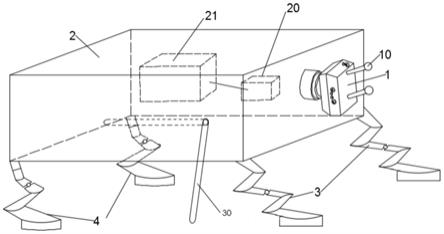
29.图1为本发明的实施例的能够稳定越障的机器人的结构示意图;
30.图2为本发明的实施例的能够稳定越障的机器人的控制系统的原理框图;
31.图3为本发明的实施例的能够稳定越障的机器人的控方法的步骤流程图。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
34.下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的限定。
35.在现有技术领域中,履带式机器人往往因为侧翻后无法进行自行调整而必须人为进行外力干涉,当其应用于部分危险场景时会增加使用人员的安全风险。
36.因此,针对现有技术中存在的上述缺陷,本发明通过以下几个实施例进行说明。
37.实施例一:
38.本发明包括一种能够稳定越障的机器人,其中包括:
39.一头部1,头部1内设置一环境检测模组10,环境检测模组10用于实时获取外部的环境信息;
40.一主躯体2,设置于头部的下部,主躯体2内设置一侧翻检测模组20,侧翻检测模组20用于实时检测机器人的运行情况;
41.主躯体2内还设置一中控模组21,分别连接环境检测模组10与侧翻检测模组20,中控模组21根据实时获取的外部的环境信息进行分析处理,以输出相应的一第一控制信号,并当侧翻检测模组检测到机器人发生侧翻时输出一第二控制信号;
42.两条前爬肢3,分别设置于主躯体的两侧靠近前部处,根据第一控制信号进行运动;
43.主躯体2的两侧分别设置一支撑杆30,用于根据第二控制信号辅助机器人以进行姿态调整;
44.两条后爬肢4,分别设置于主躯体的两侧靠近后部处,根据第一控制信号进行运动。
45.通过上述能够稳定越障的机器人的技术方案,结合图1、2所示,该机器人主要包括头部1、主躯体2、两条前肢3、两条后肢4,头部1主要用于检测外部的环境信息,例如环境检测模组10可以为雷达扫描仪,用以实时获取外部的所述环境信息,其中雷达扫描仪可以设置至少两个,分别设置于头部1的两侧,该雷达扫描仪在运行的过程中,不停的360度旋转,以便能够扫描到360度的环境信息,该环境信息也可以是图像信息。
46.进一步地,主躯体2作为该机器人的信息处理核心部分,设置有侧翻检测模组20,用于实时检测机器人的运行情况,例如,该侧翻检测模组可以为imu传感器,其中imu传感器可以是3d加速度计,与现有技术中的imu传感器不同的是,该imu传感器中是设置有3d加速度计,并无陀螺仪,该imu传感器用以实时检测该机器人的身体姿态,该身体姿态包括直立姿态、倾倒姿态等。
47.进一步地,主躯体2还设置中控模组21,根据实时获取的外部的环境信息进行分析处理,以输出相应的一第一控制信号,并当侧翻检测模组检测到能够稳定越障的机器人发生侧翻时输出一第二控制信号;例如,当环境检测模组10获取到该机器人外部的环境信息中不能前行时,则输出相应的向后退的第一控制信号,两条前肢3与两条后肢4分别根据向后退的第一控制信号进行运动。此时,两条前肢3同步运行,同理两条后肢4同步运行,当然,前肢3与后肢4也可以独立控制。其中,主躯体2通过电机或内燃机驱动前爬肢3、后爬肢4及支撑杆30运动,前爬肢3与后爬肢4均为7轴传动结构,该前爬肢3与后爬肢4也可以采用现有技术中的传动结构实现,在此不再赘述。
48.进一步地,当侧翻检测模组20实时检测该机器人的身体姿态发生侧翻时,中控模组21输出相应的第二控制信号,此时,侧翻方向相应的支撑杆30根据第二控制信号进行展开,并且抵至地面以起到支撑作用,进而辅助机器人以进行姿态调整。例如,当侧翻检测模组20实时检测该机器人的身体姿态向右侧翻时,中控模组21输出相应的以控制展开主躯体2右侧的支撑杆30的第二控制信号,此时,右侧的支撑杆30根据第二控制信号进行展开,并且抵至地面以起到支撑作用,进而辅助机器人以进行姿态调整,进而避免该机器人向右侧翻倒。还例如,当侧翻检测模组20实时检测该机器人的身体姿态向左侧翻时,中控模组21输出相应的以控制展开主躯体2左侧的支撑杆30的第二控制信号,此时,左侧的支撑杆30根据
第二控制信号进行展开,并且抵至地面以起到支撑作用,进而辅助机器人以进行姿态调整,进而避免该机器人向左侧翻倒。
49.同时,中控模组21还包括一报警装置210,当侧翻检测模组20检测到该机器人发生侧翻时输出一报警信号。该报警信号可以是语音报警信号或鸣笛信号或是led灯显示信号。该机器人在进行姿态调整的同时,通过上述提到的任一种的报警信号提醒周围的工作人员尽快离开,以避免受到伤害。
50.进一步地,该机器人能够在复杂狭窄的环境下运行,且在侧翻时能够自动调整,减少外力干涉,当应用于部分危险场景时,能够降低使用人员的安全风险。
51.实施例二:
52.本发明还包括一种能够稳定越障的机器人的控制方法,其中,用于上述任一的能够稳定越障的机器人,其特征在于,控制方法包括以下步骤:
53.步骤s1、采用一环境检测模组10,以实时获取外部的环境信息;
54.步骤s2、采用一侧翻检测模组20,以实时检测机器人的运行情况;
55.步骤s3、采用一中控模组21,根据实时获取的外部的环境信息进行分析处理,以输出相应的一第一控制信号,并当侧翻检测模组20检测到机器人发生侧翻时输出一第二控制信号;
56.步骤s4、采用两条后爬肢4,以根据第一控制信号进行运动;
57.步骤s5、采用两条前爬肢3,以根据第二控制信号进行运动;
58.步骤s6、采用一支撑杆30,以根据第二控制信号辅助机器人以进行姿态调整。
59.通过上述能够稳定越障的机器人的控制方法的技术方案,如图3所示,该机器人的控制方法应用于上述能够稳定越障的机器人。采用该机器人的控制方法能够在复杂狭窄的环境下运行,且在侧翻时能够自动调整,减少外力干涉,当应用于部分危险场景时,能够降低使用人员的安全风险。
60.具体地,环境检测模组10用以实时获取外部的环境信息,例如环境检测模组10可以为雷达扫描仪,用以实时获取外部的所述环境信息,其中雷达扫描仪可以设置至少两个,分别设置于头部1的两侧,该雷达扫描仪在运行的过程中,不停的360度旋转,以便能够扫描到360度的环境信息,该环境信息也可以是图像信息。
61.进一步地,侧翻检测模组20用于实时检测能够稳定越障的机器人的运行情况,例如,该侧翻检测模组可以为imu传感器,其中imu传感器可以是3d加速度计,用以实时检测该机器人的身体姿态,该身体姿态包括直立姿态、倾倒姿态等。
62.进一步地,主躯体2还设置中控模组21,根据实时获取的外部的环境信息进行分析处理,以输出相应的一第一控制信号,并当侧翻检测模组检测到机器人发生侧翻时输出一第二控制信号;例如,当环境检测模组10获取到该机器人外部的环境信息中不能前行时,则输出相应的向后退的第一控制信号,两条前肢3与两条后肢4分别根据向后退的第一控制信号进行运动。此时,两条前肢3同步运行,同理两条后肢4同步运行,当然,前肢3与后肢4也可以独立控制。其中,主躯体2通过电机或内燃机驱动前爬肢3、后爬肢4及支撑杆30运动,前爬肢3与后爬肢4均为7轴传动结构,该前爬肢3与后爬肢4也可以采用现有技术中的传动结构实现,在此不再赘述。
63.进一步地,当侧翻检测模组20实时检测该机器人的身体姿态发生侧翻时,中控模
组21输出相应的第二控制信号,此时,侧翻方向相应的支撑杆30根据第二控制信号进行展开,并且抵至地面以起到支撑作用,进而辅助机器人以进行姿态调整。例如,当侧翻检测模组20实时检测该机器人的身体姿态向右侧翻时,中控模组21输出相应的以控制展开主躯体2右侧的支撑杆30的第二控制信号,此时,右侧的支撑杆30根据第二控制信号进行展开,并且抵至地面以起到支撑作用,进而辅助机器人以进行姿态调整,进而避免该机器人向右侧翻倒。还例如,当侧翻检测模组20实时检测该机器人的身体姿态向左侧翻时,中控模组21输出相应的以控制展开主躯体2左侧的支撑杆30的第二控制信号,此时,左侧的支撑杆30根据第二控制信号进行展开,并且抵至地面以起到支撑作用,进而辅助机器人以进行姿态调整,进而避免该机器人向左侧翻倒。
64.同时,中控模组21还包括一报警装置210,当侧翻检测模组20检测到该机器人发生侧翻时输出一报警信号。该报警信号可以是语音报警信号或鸣笛信号或是led灯显示信号。该机器人在进行姿态调整的同时,通过上述提到的任一种的报警信号提醒周围的工作人员尽快离开,以避免受到伤害。
65.进一步地,该机器人能够在复杂狭窄的环境下运行,且在侧翻时能够自动调整,减少外力干涉,当应用于部分危险场景时,能够降低使用人员的安全风险。
66.需要说明的是,上述能够稳定越障的机器人可以采用电机或内燃机驱动控制前肢3与后肢4以及支撑杆30执行相应动作,也可以采用现有技术中实现,在此不再赘述。另外,该能够稳定越障的机器人防止侧翻后无法进行自行调整而设计的技术方案,具体的越障过程可以采用现有技术中的技术实现,在此不再赘述。
67.以上所述仅为本发明较佳的实施例,并非因此限制本发明的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本发明说明书及图示内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1