一种智能射频刀控制系统及方法
1.本发明属于智能射频刀控制技术领域,具体涉及一种智能射频刀控制系统及方法。
背景技术:
2.随着医疗技术的不断进步,手术器械也在不断地改进,出现了钢刀、电刀、超声刀、激光刀、射频刀等。其中射频刀是通过输出4mhz的射频电波完成对组织的精确切割。它的工作原理为射频信号发生器在电极工作端输出4mhz的射频电磁波,细胞内的水分子在电磁场的影响下快速振荡、撞击,促使细胞壁破裂,从而实现了切割目的;通过控制电极输出不同波峰因子的射频电磁波可以实现不同的手术功能。
3.根据射频刀系统的临床特性,在射频刀控制系统中,需通过外加机构对刀具输出功率进行准确控制,提升微创手术的控制精度。
4.目前,国内现有技术难以实现对mhz级别的射频刀输出功率的精确控制。研究表明输出频率达到1~100mhz时,就会大大减少细胞组织碳化的问题,更高的工作频率可以使手术造成的热穿透深度降低,但是更高的工作频率也会带来电路设计困难,器件选型困难等问题。
5.另一方面,相比于普通的高频电刀,mhz级别的射频刀由于工作频率高,导致输出信号采样困难,因此目前大多数射频刀的输出功率控制方案仍然采用开环控制。然而开环控制输出不够稳定,且无法对不同模式下的输出波形的波峰因子进行控制,如果不能及时调整射频刀的输出功率和输出波形的波峰因子,临床手术可能达不到预期效果。这对控制的实时性和准确性提出了更加严格的要求。
技术实现要素:
6.本发明的主要目的在于克服现有技术的缺点与不足,提出一种智能射频刀控制系统及方法,系统具有控制精度高、实时性好、安全性强、可靠性高等优点。
7.为了达到上述目的,本发明采用以下技术方案:
8.一种智能射频刀控制系统,包括控制模块、人机交互模块以及隔离模块;控制模块与人机交互模块和隔离模块电路连接;
9.控制模块,用于调整控制射频输出功率与输出模式,包括单片机及其外围电路、hmi和隔离模块单片机通信电路、负极板检测电路、手柄检测电路、脚踏检测电路、切割和凝血开关控制电路、功率控制电路以及模式控制电路;单片机及其外围电路与hmi和隔离模块单片机通信电路、负极板检测电路、手柄检测电路、脚踏检测电路、切割和凝血开关控制电路、功率控制电路以及模式控制电路电路连接;
10.人机交互模块,用于实时显示射频刀的工作状态,包括电平转换电路以及迪文屏;
11.隔离模块,用于输出射频信号给射频刀头并实时测量射频刀的工作参数,包括射频输出电路、输出信号采样电路、单片机及其外围电路、与控制模块单片机通信电路以及工
作状态指示电路。
12.进一步的,控制模块中,单片机及其外围电路,用于接收人机交互模块和隔离模块发送的信息并对射频输出进行控制;
13.hmi和隔离模块单片机通信电路,用于与人机交互模块以及隔离模块通信;
14.负极板检测电路,用于检测负极板是否接入;
15.手柄检测电路,用于检测手柄按下状态;
16.脚踏检测电路,用于检测脚踏踏下状态;
17.切割和凝血开关控制电路,用于控制射频切割模式开关和射频凝血模式开关。
18.进一步的,模式控制电路包括cpld、反相器、推挽电路以及mosfet驱动电路;
19.cpld,用于输出两路4mhz的互补方波;
20.反相器,用于增强cpld输出信号的驱动能力,反相器输出的方波幅值为5v,经过mosfet驱动电路后方波幅值升为12v用于给mosfet提供栅极驱动信号;
21.推挽电路包括一个变压器以及两个mosfet组成,通过控制两个mosfet的驱动信号使这两个mosfet交替导通,将直流电逆变为频率为4mhz的交流电。
22.进一步的,模式控制电路通过控制mosfet驱动信号占空比控制射频输出波形占空比,输出正弦波占空比越小,波峰因子越大,不同的波峰因子具有不同的切割和凝血效果,进而实现控制射频输出模式。
23.进一步的,功率控制电路,用于通过控制mosfet驱动电路输入的直流电压控制射频输出功率,使射频刀输出功率能够保持在期望值;功率控制电路包括数模转换器和降压稳压器;
24.数模转换器输出电压由控制模块中的单片机及其外围电路控制,通过调整数模转换器的输出电压调整降压稳压器的输出电压;
25.降压稳压器的输出电压用于给推挽电路提供直流电,调整降压稳压器的输出电压实现调整射频输出电压,进而实现射频输出功率控制。
26.进一步的,控制模块的单片机通过控制数模转换器的输出电压调整降压稳压器的输出电压,进而改变推挽电路中mosfet的漏极电压;cpld输出的4mhz方波信号通过反相器为推挽电路中的mosfet提供栅极驱动信号,单片机通过控制cpld的输出使能信号占空比调整mosfet栅极驱动信号的占空比;
27.通过调整mosfet的漏极电压和栅极驱动信号实现对射频输出功率和输出模式的控制。
28.进一步的,人机交互模块中,电平转换电路用于将迪文屏发出的rs232电平标准的信号转换为单片机能接收的ttl电平标准的信号,同时将单片机发出的ttl电平标准的信号转换为迪文屏能接收的rs232电平标准的信号。
29.进一步的,隔离模块中,射频输出电路包括隔离变压器、lc谐振电路以及输出控制继电器,用于将隔离变压器输出的不标准正弦波整形为标准正弦波;其中,隔离变压器用于减少漏电流,确保人接触到设备时不会触电,也确保医疗设备在使用过程中的连续性;lc谐振电路,用于过滤除4mhz外的信号并对4mhz信号进行升压;输出控制继电器,用于控制射频切割模式开关和射频凝血模式开关;
30.输出信号采样电路,用于将射频输出信号进行采样限幅并传输给隔离模块的单片
机处理;
31.单片机及其外围电路,用于接收输出信号采样值,进行快速傅里叶变换,并计算射频输出功率和输出波形波峰因子,然后通过dma方式将输出信息传输给控制模块的单片机;
32.与控制模块单片机通信电路使用光耦隔离芯片实现与控制模块的单片机和隔离模块的单片机的隔离通信;
33.工作状态指示电路,用于实时指示射频刀工作状态。
34.本发明还包括基于提供的智能射频刀控制系统的控制方法,包括以下步骤:
35.s1、根据设定射频输出功率和输出模式,确定期望功率值和期望波峰因子;
36.s2、获取隔离模块的单片机测量到的实际功率值和实际波峰因子;
37.s3、计算功率偏差值和波峰因子偏差值;功率偏差值由期望功率值和实际功率值确定;波峰因子偏差值由期望波峰因子和实际波峰因子确定;
38.s4、由功率偏差值和波峰因子偏差值,计算目标电压和射频输出占空比;
39.s5、根据目标电压调整数模转换器的输出电压,目标电压越大,数模转换器的设定输出电压越小,目标电压越小,数模转换器的设定输出电压越大;
40.s6、根据射频输出占空比,调整cpld的输出使能信号,使cpld输出占空比达到目标射频输出占空比;
41.s7、数模转换器输出调整后的电压值用于控制提供给mosfet漏极的直流电压,cpld将目标占空比的mosfet驱动信号输入至推挽电路的mosfet中,以改变射频刀的输出功率和射频输出波峰因子。
42.进一步的,步骤s2中,实际功率值和实际波峰因子的测量过程具体为:
43.s21、将单片机中的adc初始化并将adc设置为交替采样模式,并将定时器初始化,设置定时中断时间;
44.s22、启动adc;
45.s23、判断定时器是否发生中断,如果发生中断,单片机从dma缓冲区获取模拟采样值并使用快速傅里叶算法将时域信号转换为频域信号;
46.s24、根据求出4mhz信号的幅值;
47.其中,amplitude为对应频率的幅值,fftoutput[]为通过快速傅里叶算法计算得到的频域信号数组,frequency为计算幅值的频率,samplingfrequency为采样频率,samplingnumber为采样点数;
[0048]
将frequency设置为4mhz,求得的幅值就是4mhz信号的幅值,由于射频刀输出为4mhz的正弦波,因此4mhz信号的幅值就是最大输出电压值;
[0049]
s25、根据模拟采样值计算出输出电压的均方根值;
[0050]
由于信号采样电路将射频输出的正弦波整流成只有正电压值的半波信号,计算输出电压均方根值时去掉一半的零电压值,在计算均方根值时,先对模拟采样值进行排序,然后对后一半采样值进行均方根值计算;
[0051]
s26、根据s24得到的最大输出电压值和s25得到的均方根值,计算输出信号波峰因子;
[0052]
s27、使用dma通信的方式将最大输出电压值和波峰因子发送给控制模块的单片机;重复执行步骤s23至s27。
[0053]
本发明与现有技术相比,具有如下优点和有益效果:
[0054]
1、现有技术对于输出功率和输出波形波峰因子通常采取开环控制,本发明通过高采样率的adc采集射频刀输出信号,通过快速傅里叶变换将时域信号转换为频域信号,从频域信号中获取输出功率和输出波形波峰因子,控制模块单片机根据反馈信号对输出功率和输出波形波峰因子进行控制,提高了射频刀输出功率的稳定性,并通过控制射频刀输出波形的波峰因子,使射频刀严格工作在设定的输出模式下。
[0055]
2、现有电刀设备一般采用按键式的控制面板,本发明使用迪文屏作为人机交互模块,提高了交互便捷性。
附图说明
[0056]
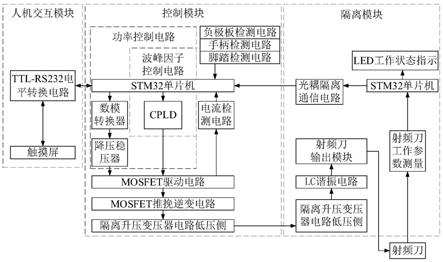
图1是本发明系统的整体示意图;
[0057]
图2是本发明系统的控制模块的示意图;
[0058]
图3是本发明系统的隔离模块的示意图;
[0059]
图4a是本发明系统的切割模式输出波形;
[0060]
图4b是本发明系统的凝血模式输出波形;
[0061]
图5是本发明实施例功率和模式控制电路的示意图;
[0062]
图6是本发明实施例输出信号采样处理的流程图;
[0063]
图7是本发明实施例推挽电路的示意图。
具体实施方式
[0064]
下面结合实施例及附图对本发明作进一步详细的描述,但本发明的实施方式不限于此。
[0065]
实施例
[0066]
如图1所示,本发明,一种智能射频刀控制系统,包括控制模块、人机交互模块以及隔离模块;控制模块与人机交互模块和隔离模块电路连接;
[0067]
控制模块,用于调整控制射频输出功率与输出模式,如图2所示,包括单片机及其外围电路、hmi和隔离模块单片机通信电路、负极板检测电路、手柄检测电路、脚踏检测电路、切割和凝血开关控制电路、功率控制电路以及模式控制电路;单片机及其外围电路与hmi和隔离模块单片机通信电路、负极板检测电路、手柄检测电路、脚踏检测电路、切割和凝血开关控制电路、功率控制电路以及模式控制电路电路连接;
[0068]
单片机及其外围电路,用于接收人机交互模块和隔离模块发送的信息并对射频输出进行控制;
[0069]
hmi和隔离模块单片机通信电路,用于与人机交互模块以及隔离模块通信;
[0070]
负极板检测电路,用于检测负极板是否接入;手柄检测电路,用于检测手柄按下状态;脚踏检测电路,用于检测脚踏踏下状态;切割和凝血开关控制电路,用于控制射频切割模式开关和射频凝血模式开关;
[0071]
功率控制电路,用于通过控制推挽电路输入的直流电压控制射频输出功率,使射
频刀输出功率能够保持在期望值。
[0072]
人机交互模块,用于实时显示射频刀的工作状态,包括电平转换电路以及迪文屏;电平转换电路用于将迪文屏发出的rs232电平标准的信号转换为单片机能接收的ttl电平标准的信号,同时将单片机发出的ttl电平标准的信号转换为迪文屏能接收的rs232电平标准的信号。
[0073]
隔离模块,用于输出射频信号给射频刀头并实时测量射频刀的工作参数,如图3所示,包括射频输出电路、输出信号采样电路、单片机及其外围电路、与控制模块单片机通信电路以及工作状态指示电路。
[0074]
射频输出电路包括隔离变压器、lc谐振电路以及输出控制继电器,用于将隔离变压器输出的不标准正弦波整形为标准正弦波;其中,隔离变压器用于减少漏电流,确保人接触到设备时不会触电,也确保医疗设备在使用过程中的连续性;lc谐振电路,用于过滤除4mhz外的信号并对4mhz信号进行升压;输出控制继电器,用于控制射频切割模式开关和射频凝血模式开关;
[0075]
输出信号采样电路,用于将射频输出信号进行采样限幅并传输给隔离模块的单片机处理;
[0076]
单片机及其外围电路,用于接收输出信号采样值,进行快速傅里叶变换,并计算射频输出功率和输出波形波峰因子,然后通过dma方式将输出信息传输给控制模块单片机;
[0077]
与控制模块单片机通信电路使用光耦隔离芯片实现控制模块单片机和隔离模块单片机的隔离通信;
[0078]
工作状态指示电路,用于实时指示射频刀工作状态。
[0079]
在本实施例中,工作状态指示具体为:
[0080]
一、初始化硬件设备
[0081]
硬件平台基于stm32f303,使用外部晶振作为单片机的时钟源。硬件平台上电后,初始化uart1、uart4和spi3串口和模数转换器,其中uart1串口用于和隔离区单片机通信,uart4用于调试,spi3用于和隔离区单片机通信,模数转换器用于将射频输出的模拟采样信号转换为数字信号。
[0082]
二、采集固定点数的采样信号并将采集到的电压电流信号进行快速傅里叶变换,将时域信号转换为频域信号,并根据该频域信号计算出4mhz信号的幅值,然后根据采样值计算出射频输出信号的均方根值,最后通过4mhz信号的幅值和均方根值计算出射频输出信号的波峰因子。
[0083]
三、使用dma传输的方式将4mhz信号的幅值和射频输出信号的波峰因子发送给控制模块的单片机。
[0084]
在本实施例中,控制模块中的模式控制电路包括cpld(复杂可编程逻辑器件)、反相器、推挽电路以及mosfet驱动电路;
[0085]
cpld,用于输出两路4mhz的互补方波;
[0086]
反相器,用于增强cpld输出信号的驱动能力,反相器输出的方波幅值为5v,经过mosfet驱动芯片后方波幅值升为12v用于给mosfet提供栅极驱动信号。
[0087]
如图7所示,推挽电路由一个变压器和两个mosfet组成,通过控制两个mosfet的驱动信号使这两个mosfet交替导通,将直流电逆变为频率为4mhz的交流电。
[0088]
模式控制电路通过控制mosfet驱动信号占空比控制射频输出波形占空比,输出正弦波占空比越小,波峰因子越大,不同的波峰因子具有不同的切割和凝血效果,进而实现控制射频输出模式。切割模式和凝血模式的输出波形如图4a和图4b所示。
[0089]
在本实施例中,功率控制电路包括数模转换器和降压稳压器;
[0090]
数模转换器输出电压由控制模块中的单片机及其外围电路控制,通过调整数模转换器的输出电压调整降压稳压器的输出电压;
[0091]
降压稳压器的输出电压用于给推挽电路提供直流电,调整降压稳压器的输出电压实现调整射频输出电压,进而实现射频输出功率控制。
[0092]
如图5所示,控制模块的单片机通过控制数模转换器的输出电压调整降压稳压器的输出电压,进而改变推挽电路中mosfet的漏极电压;cpld输出的4mhz方波信号通过反相器为推挽电路中的mosfet提供栅极驱动信号,单片机通过控制cpld的输出使能信号占空比调整mosfet栅极驱动信号的占空比;
[0093]
通过调整mosfet的漏极电压和栅极驱动信号实现对射频输出功率和输出模式的控制。
[0094]
在本实施例中,控制射频输出功率和输出模式的控制具体操作过程为:
[0095]
一、初始化硬件设备
[0096]
硬件平台上电后,初始化串口和子系统硬件平台。硬件平台基于stm32f303,使用内部串口实现与其他模块的通信。首先初始化uart 1、3、4、5串口和spi1、2、3串口,uart1串口用于和隔离区单片机通信,uart3串口用于和cpld通信,uart4串口用于调试,uart5串口用于和迪文屏通信,spi1串口用于控制模数转换器输出电压值,spi2串口用于和cpld通信,spi3用于和隔离区单片机通信。
[0097]
二、迪文屏界面初始化
[0098]
配置完与迪文屏通信的串口后,首先读取迪文屏自带的实时时钟的时间,然后在迪文屏上使用设定的字体显示需要显示的文字,并从flash中读取最近的日志内容并写入对应的变量空间,最后在程序中设置看门狗。具体包括:
[0099]
(1)划分512字节缓冲区使用循环队列存储迪文屏发出的指令,每隔5ms读取一次指令缓冲区的指令,若缓冲区不为空,这处理缓冲区的一条指令;
[0100]
(2)向迪文屏发送读实时时钟指令,收到迪文屏返回的指令后通过判断指令中的变量地址判断该指令返回的数据为哪个变量值。若变量地址为0x0010(存储实时时间的变量地址)时,记录指令中的年、月、日、时、分、秒等数据。
[0101]
(3)控制模块的单片机向迪文屏发送读nor flash指令,迪文屏读取nor flash数据后通过串口将数据发送给控制模块的单片机,单片机根据收到的历史值对射频刀进行初始化。其中,存储在迪文屏nor flash中的数据包括日志内容、显示亮度、系统音量、日志条数、系统语言、激发方式以及不同输出模式设置的默认功率。
[0102]
(4)从nor flash读取出系统语言后,根据系统语言重新配置迪文屏上显示的文字信息。在开发软件keil mdk中使用的文字编码格式为utf-8,而在迪文屏中使用的文字编码格式为unicode,因此在将文字信息发送给迪文屏之前需要将utf-8编码格式的文字转换为unicode编码格式。
[0103]
(5)开启看门狗。
[0104]
三、使用定时中断的方式每隔5ms检测一次射频刀的工作状态并对射频刀输出功率进行控制。
[0105]
在另一个实施例中,本发明还提供了基于上述实施例所述智能射频刀控制系统的控制方法,包括以下步骤:
[0106]
s1、根据设定射频输出功率和输出模式,确定期望功率值和期望波峰因子;
[0107]
s2、获取隔离模块单片机测量到的实际功率值和实际波峰因子;其中,如图6所示,实际功率值和实际波峰因子的测量过程具体为:
[0108]
s21、将单片机中的adc(数模转换器)初始化并将adc设置为交替采样模式,并将定时器初始化,设置定时中断时间;
[0109]
s22、启动adc;
[0110]
s23、判断定时器是否发生中断,如果发生中断,单片机从dma缓冲区获取模拟采样值并使用快速傅里叶算法将时域信号转换为频域信号;
[0111]
s24、根据求出4mhz信号的幅值;
[0112]
其中,amplitude为对应频率的幅值,fftoutput[]为通过快速傅里叶算法计算得到的频域信号数组,frequency为计算幅值的频率,samplingfrequency为采样频率,samplingnumber为采样点数;
[0113]
将frequency设置为4mhz,求得的幅值就是4mhz信号的幅值,由于射频刀输出为4mhz的正弦波,因此4mhz信号的幅值就是最大输出电压值;
[0114]
s25、根据模拟采样值计算出输出电压的均方根值;
[0115]
由于信号采样电路将射频输出的正弦波整流成只有正电压值的半波信号,因此在计算输出电压均方根值时需要去掉一半的零电压值,在计算均方根值时,先对模拟采样值进行排序,然后对后一半采样值进行均方根值计算;
[0116]
s26、根据s24得到的最大输出电压值和s25得到的均方根值,计算输出信号波峰因子;
[0117]
s27、使用dma通信的方式将最大输出电压值和波峰因子发送给控制模块单片机;重复执行步骤s23至s27。
[0118]
s3、计算功率偏差值和波峰因子偏差值;功率偏差值由期望功率值和实际功率值确定;波峰因子偏差值由期望波峰因子和实际波峰因子确定;
[0119]
s4、由功率偏差值和波峰因子偏差值,计算目标电压和射频输出占空比;
[0120]
s5、根据目标电压调整数模转换器的输出电压,目标电压越大,数模转换器的设定输出电压越小,目标电压越小,数模转换器的设定输出电压越大;
[0121]
s6、根据射频输出占空比,调整cpld的输出使能信号,使cpld输出占空比达到目标射频输出占空比;
[0122]
s7、数模转换器输出调整后的电压值用于控制提供给mosfet漏极的直流电压,cpld将目标占空比的mosfet驱动信号输入至推挽电路的mosfet中,以改变射频刀的输出功率和射频输出波峰因子。
[0123]
还需要说明的是,在本说明书中,诸如术语“包括”、“包含”或者其任何其他变体意
在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
[0124]
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其他实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1