基于执行器故障的高超声速导弹的自适应容错控制器
1.本发明涉及高超声速导弹的飞行控制,更特别地说,是指一种基于执行器故障的高超声速导弹的自适应容错控制器,并依据所述自适应容错控制器进行高超声速导弹的自适应容错飞行控制。
背景技术:
2.高超声速导弹(最大飞行速度大于等于5倍音速)具有防区外发射、远距离巡航、高空高速进入退出、短时间全球部署、有效截击时间敏感目标的能力,已经成为以美国为首的军事强国研究的热点。然而,相对于传统制导导弹而言,由于飞行环境恶劣,具有极高的飞行速度和大空域机动飞行的特点,导致其飞行动力学特性更加复杂,是一个强非线性、高不确定性、强耦合性和强干扰的控制问题,所以其飞行控制系统设计具有巨大挑战。
3.由于高超声速导弹飞行环境恶劣,执行器以及飞行器结构容易故障。一旦故障发生,往往会造成经济上的损失甚至带来灾难性的后果。因此,如何提高飞行器的可靠性,使得飞行器在故障情况下保持安全飞行,已经成为目前控制研究领域的一个重要问题。而容错控制作为一种处理故障影响的有效的控制手段,已经成为控制领域学者研究的一个热点。
4.2013年3月在期刊为“电肖与控制”中发表的《基于故障补偿思想的导弹执行机构主动容错控制研究》,作者曹祥宇,胡昌华,乔俊峰,马清亮。该期刊中介绍了导弹的主动容错控制系统包括故障诊断与切换控制、故障补偿、控制器、执行机构、导弹、传感器等6个组成部分,其方案示意如图2所示。
5.现有的高超声速飞行器容错控制方法采用基于干扰观测器技术对执行器故障进行估计,但是,由于建模误差、外部干扰和参数不确定性等因素放大,会导致控制增益变得很大,从而导致系统不稳定,很难应用于实际的飞行中。
6.现有的高超声速飞行器容错控制方法的提出都是基于线性模线性型,没有考虑扰动和不确定性因素。这些方法不能同时解决高超声速导弹在强非线性,强耦合,参数不确定性,外界干扰和执行器故障情况下的飞行控制问题,因此没有现实的物理意义。
7.因此,亟需提出一种新的容错编队控制方法实现对执行器故障、参数不确定性以及外界干扰的高超声速导弹容错控制。
技术实现要素:
8.本发明的目的在于设计了一种基于执行器故障的高超声速导弹的自适应容错控制器。是在导弹标称输出反馈控制器与执行器之间增加了自适应容错控制器。另一目的是依据本发明自适应容错控制器提出一种高超声速导弹自适应容错飞行控制方法,以确保高超声速导弹在执行器故障、参数不确定性以及外界干扰情况下实现期望的安全稳定飞行。
9.本发明的一种基于执行器故障的高超声速导弹的自适应容错控制器,其特征在于:是在导弹标称输出反馈控制器与执行器之间增加了自适应容错控制器;
10.构建所述自适应容错控制器的步骤有:
11.步骤1,建立高超声速导弹在模型参数不确定性,外界气流干扰条件下的运动模型;
12.自适应容错控制器接收高超声速导弹的运动参数,并建立高超声速导弹在模型参数不确定性,外界气流干扰条件下的运动模型为
[0013][0014]
在本发明中,定义没有故障时的高超声速导弹控制输入量为u=[f
x f
y fz]
t
,则得到高超声速导弹如下三维空间运动模型为
[0015]
所述
[0016]
所述
[0017]
步骤2,构建高超声速导弹在执行器故障条件下的动态模型;
[0018]
考虑执行器故障模型情况下,高超声速导弹的动力控制输入为uf=(1-ε)u;
[0019]
加载执行器故障模型后的高超声速导弹的运动模型为
[0020]
步骤3,依据故障下的动态模型设计了自适应容错控制器;
[0021]
依据步骤1和步骤2建立的动态模型设计自适应容错控制器为
[0022]
与现有技术的方法相比,本发明基于执行器故障的高超声速导弹的自适应容错控制器具有以下种优点:
[0023]
①
本发明提出的高超声速导弹自适应容错飞行控制算法,可以使高超声速导弹在发生故障情况时稳定飞行。完整地考虑到高超声速导弹受到执行器故、参数不确定性和外界扰动,这样设计的控制器更加完善具体,大大提高飞行器编队的可靠性和安全性,更符合实际应用。
[0024]
②
在相比目前现有的技术,本发明设计的自适应容错控制器不需要对执行器故障进行估计,也不需要任何执行器故障信息,所提出的自适应控制器的复杂性几乎等于pid控制器,相比较目前现有的自适应容错方法更容易在实际中实现。
[0025]
③
本发明加载自适应容错控制器的飞行控制方法作为一种高超声速导弹的自适应容错飞行控制方法,具有一定的实际应用价值,容错能力强,可以有效提高高超声速导弹安全性。应用方便、可靠。
附图说明
[0026]
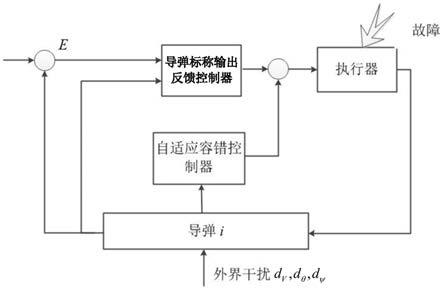
图1是本发明的高超声速导弹自适应容错控制系统结构框图。
[0027]
图2是导弹的主动容错控制示意图。
[0028]
图3是本发明仿真模拟的高超声速导弹在故障条件下的三维空间位置响应曲线。
[0029]
图4是本发明仿真模拟的高超声速导弹在故障条件下的位置响应曲线。
[0030]
图5是本发明仿真模拟的高超声速导弹在故障条件下的速度、航迹角以及航向角响应曲线。
[0031]
图6是本发明仿真模拟的高超声速导弹在故障条件下的位置误差响应曲线。
具体实施方式
[0032]
下面将结合附图和实施例对本发明做进一步的详细说明。
[0033]
在本发明中,依据了图2所示的基于故障补偿的主动容错控制结构,本发明改进之处在于,在导弹标称输出反馈控制器与执行器之间增加了自适应容错控制器,以此实现高超声速导弹在执行器故障、模型参数不确定性以及外界干扰情况下的期望飞行,可以显著提高高超声速导弹飞行的可靠性和抗干扰能力。此外所设计的控制律不需要故障信息,结构简单,易于在实际中应用。
[0034]
如图1所示,本发明针对高超声速导弹在执行器故障模式下设计了自适应容错控制器,依据本发明的自适应容错控制器提出了一种自适应容错编队控制算法,使得高超声速导弹在执行器故障、参数不确定性以及外界干扰情况下仍可以实现安全稳定飞行。通过设计的自适应容错控制器可以有效抑制这些干扰的影响,提高编队飞行的稳定性。
[0035]
本发明的基于执行器故障的高超声速导弹的自适应容错控制器的具体构建步骤为:
[0036]
步骤1,建立高超声速导弹在模型参数不确定性,外界气流干扰条件下的运动模型;
[0037]
在本发明中,自适应容错控制器接收高超声速导弹的运动参数,并建立高超声速导弹在模型参数不确定性,外界气流干扰条件下的运动模型为:
[0038][0039]
表示高超声速导弹的飞行加速度。
[0040]
v表示高超声速导弹的飞行速度。
[0041]fx
表示高超声速导弹在纵向上的控制力。
[0042]fy
表示高超声速导弹在侧向上的控制力。
[0043]fz
表示高超声速导弹在高度方向上的控制力。
[0044]
q表示动压,所述q=0.5ρv2,ρ表示大气密度。
[0045]
s表示高超声速导弹翼参考面积。
[0046]cd
表示高超声速导弹的阻力系数。
[0047]
dc表示高超声速导弹阻力系数的未建模项。
[0048]
m表示高超声速导弹的质量。
[0049]dm
表示高超声速导弹质量的未建模项。
[0050]
g表示引力常量。
[0051]
θ表示高超声速导弹的航迹角。
[0052]
表示高超声速导弹的航迹角的角速度;
[0053]
ψ表示高超声速导弹的航向角。
[0054]
表示高超声速导弹的航向角的角速度;
[0055]
dv表示高超声速导弹速度受到的外界干扰。
[0056]dθ
表示高超声速导弹航迹角受到的外界干扰。
[0057]dψ
表示高超声速导弹航向角受到的外界干扰。
[0058]
表示高超声速导弹在惯性坐标系纵向上的速度。
[0059]
表示高超声速导弹在惯性坐标系侧向上的速度。
[0060]
表示高超声速导弹在在惯性坐标系高度方向上的速度。
[0061]
在本发明中,定义没有故障时的高超声速导弹控制输入量为u=[f
x f
y fz]
t
,则可以得到高超声速导弹如下三维空间运动模型为:
[0062][0063]
p表示高超声速导弹在惯性坐标系下的位置。所述p=[x y z]
t
,上角标表示矩阵
转置。所述p=[x y z]
t
中的x代表着高超声速导弹在惯性坐标系的x轴方向上的位置控制指令,所述p=[x y z]
t
中的y代表着高超声速导弹在惯性坐标系的y方向上的位置控制指令,所述p=[x y z]
t
中的z代表着高超声速导弹在惯性坐标系的z方向上的位置控制指令。
[0064]
表示高超声速导弹在惯性坐标系下的加速度矢量。
[0065]
b表示高超声速导弹参数矩阵。所述
[0066]
d表示高超声速导弹受到的阻力和地球引力产生的加速度矢量。所述
[0067]
ew表示高超声速导弹的等价扰动项,包括高超声速导弹受到的参数不确定性和外界扰动。
[0068]
步骤2,构建高超声速导弹在执行器故障条件下的动态模型;
[0069]
在步骤1中的模型基础上建立高超声速导弹在执行器故障条件下的动态模型;
[0070]
由于高超声速导弹飞行环境恶劣,执行器以及飞行器结构容易故障。考虑执行器故障模型,在实际应用中,舵机可能会出现部分失效或完全失效。因此在这种情况下,高超声速导弹的动力控制输入为:
[0071]
uf=(1-ε)u
ꢀꢀ
(3)
[0072]
uf表示故障发生后高超声速导弹的实际动力控制输入量。
[0073]
u表示没有故障时的高超声速导弹在执行器故障条件下的动态模型动力控制输入量。
[0074]
ε表示高超声速导弹在执行器故障条件下的动态模型导弹执行器发生故障后损失的效率,所述0≤ε<1表示高超声速导弹在执行器故障条件下的动态模型导弹执行器发生故障后损失的效率,如果ε=1意味着高超声速导弹在执行器故障条件下的动态模型导弹的执行器完全失效,如果ε=0表示执行器没有发生故障,仍在正常工作。
[0075]
在本发明中,经执行器故障模型的加载,从而得到了高超声速导弹在故障模式下的运动模型为:
[0076][0077]
步骤3,依据故障下的动态模型设计了自适应容错控制器;
[0078]
依据步骤1和步骤2建立的动态模型设计自适应容错控制器为:
[0079]
p是当前高超声速导弹实际的飞行信息。
[0080]
p0表示高超声速导弹的飞行参考信号。
[0081]
表示高超声速导弹的飞行参考加速度矢量信号。
[0082]
k1为控制器第1个反馈增益矩阵。
[0083]
k2为控制器第2个反馈增益矩阵。
[0084]
e表示高超声速导弹轨迹跟踪误差。所述e=p-p0。
[0085]
uua表示容错补偿控制器。
[0086]
δf表示容错补偿控制器的参数矩阵。
[0087]
n1表示容错补偿控制器的第1个状态变量。
[0088]
表示容错补偿控制器的第1个状态变量的导数。
[0089]
n2表示容错补偿控制器的第2个状态变量。
[0090]
表示容错补偿控制器的第2个状态变量的导数。
[0091]
从公式(5)可以看出,本发明设计的编队控制器不需要对执行器故障进行估计,也不需要任何执行器故障信息,而且控制器参数是时不变的,容易应用在实际中。其结构框图如图1所示。
[0092]
实施例1
[0093]
在实施例1中,对高超声速导弹在执行器故障、参数摄动以及外界扰动条件下,采用matlab软件搭建了加载有本发明自适应容错飞行控制器的仿真系统,以此验证自适应容错飞行控制方法的有效性。
[0094]
在实施例1中,对一枚高超声速导弹飞行进行仿真试验。控制目标是保证在执行器故障和参数摄动以及外界扰动条件下,完成期望的飞行任务。在仿真中,高超声速导弹在9秒时发生执行器故障,执行器器故障模式选取为ε=0.6。假设高超声速导弹的实际参数比标称参数大30%。作用于高超声速导弹的外部干扰是不消失且时变的,给出如下:dv=4sin(t)+3cos(2t),d
θ
=3sin(t)+4.5cos(t),d
ψ
=2sin(t)+2.5cos(t)。
[0095]
高超声速导弹的三维空间位置如图3所示。在故障条件下的位置响应曲线如图4所示,在故障条件下的速度、航迹角以及航向角响应曲线如图5所示,故障条件下的位置误差响应曲线如图6所示。从图3中可以看出在执行器故障、参数不确定性和外界扰动情况下,采用所提出的自适应容错控制器,可以使高超声速导弹能够很好地完成飞行任务。从图5和图6可以看出,在故障发生9s后,该编队的动态仍然是稳定的,三个方向的跟踪误差会稳定在一个小的邻域内。这些结果说明,该控制器具有较高的鲁棒性和容错性。本发明所提出的自适应容错飞行控制方法可以在非线性、参数不确定性和外部干扰下实现高超声速导弹的良好的跟踪性能和鲁棒性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1