一种多AGV路径评估规划方法与流程
一种多agv路径评估规划方法
技术领域
1.本发明属于机器人控制技术领域,具体地涉及一种多agv路径评估规划方法。
背景技术:
2.agv在执行工作任务时,往往需要提前规划前往目标点的路径以避免与环境或其它agv发生碰撞。以往的路径规划方法往往只考虑到当前点和目标点的距离,或通过添加转弯角度约束来选择尽量快捷的路径(cn110515380b基于转弯权重约束的最短路径规划方法),或利用栅格化地图解决多agv协同工作时产生的路径冲突(cn113093765a一种通用的agv集群控制系统设计框架及方法)。而在实行不同的工作任务时,单一策略生成的路径并不能做到全局最优,这需要对不同策略生成的路径进行多角度的评价,从而找到各工作环境下最优的路径。
技术实现要素:
3.本发明提供一种多agv路径评估规划方法,解决现有技术中路径规划方法不结合工作任务实际情况等问题,帮助工作人员改进和选择最优路径。
4.本发明提供一种多agv路径评估规划方法,包括:
5.(一)假设agv执行任务具有m条规划路径供选择,在每条路径上等间距设置路径点,假设路径path包含n个路径点,将该路径表示为path={[x_1,y_1],[x_2,y_2],...,[x_n,y_n]},其中[x_n,y_n]表示第n个路径点所处的位置;
[0006]
(二)对路径path进行评估,分别计算路径path的路径能耗评分p1、路径平滑度评分p2、路径避障评分p3、路径面积占用评分p4以及任务优先级评分p5;
[0007]
(三)对步骤(二)得到的路径path的五个评分进行加权计算,得到路径path的总分p,p=w1*p1+w2*p2+w3*p3+w4*p4+w5*p5,其中,w1、w2、w3、w4、w5分别为评分p1、p2、p3、p4和p5的权重;
[0008]
(四)对所有的m条路径进行上述步骤(二)~(三)的操作,计算各路径的得分,根据各路径得分选择最优规划路径。
[0009]
本发明所述步骤(二)中路径能耗评分p1的计算方法为:假设路径path中上坡、下坡、平地的长度分别为m1、m2和m3,agv上坡、下坡、平地运行单位距离的能耗分别为k1、k2和k3,则agv运行该路径需要的能耗s=k1*m1+k2*m2+k3*m3;将系统生成的m条路径的能耗进行统计,并利用正态分布为每条路径评分,获得路径path的能耗评分p1。
[0010]
本发明所述步骤(二)中路径平滑度评分p2的计算方法为:根据agv的特性对agv旋转的角度进行评级,旋转30度以下评分r1,30-60度评分r2,60-90度评分r3,根据生成的路径中折线路径出现3种等级角度的数量n1、n2、n3计算平滑度评分:p2=r1*n1+r2*n2+r3*n3。
[0011]
本发明所述步骤(二)中路径避障评分p3的计算方法为:
[0012]
(1)在agv及其负载的尺寸周围增加agv路径缓冲区,在障碍物周围增加障碍物缓冲区;
[0013]
(2)根据路径中各路径点处agv路径缓冲区与障碍物缓冲区的接触面积来计算避障评分,具体为:针对路径中的每一个路径点,计算路径点处agv的方向,做关于agv方向的垂线,将垂线与agv路径缓冲区边界的交点作为缓冲区的参考点,计算参考点在障碍物缓冲区的数量;设agv路径的总路径点数为n,而侵入障碍物缓冲区的参考点数量为m,则避障评分p3为p3=1-m/n。
[0014]
本发明所述步骤(二)中路径面积占用评分p4的计算方法为:获取路径中横、纵坐标的最大值和最小值,求出路径所占用的面积s=(x
max-x
min
)*(y
max-y
min
),其中x
max
和x
min
分别为横坐标的最大值和最小值,y
max
和y
min
分别为纵坐标的最大值和最小值,再根据路径起点位置(x
1,
y1)和终点位置(x
2,
y2)计算所占用的最小面积s
min
=|(x
1-x2)*(y
1-y2)|,计算该路径的面积占用评分p4=s
min
/s。
[0015]
本发明所述步骤(二)中任务优先级评分p5的计算方法为:根据工作环境对任务优先级的级别数量,设定优先级评分p5。
[0016]
任务优先级从低到高设为0至3间的实数,在创建任务时由人工或自动设置,任务优先级最低的任务评分为0,任务优先级最高的任务评分为3,若任务的优先级层次较多,使用小数进行表时,如优先级评分为2.15的任务较评分为2.09的任务更为优先。
[0017]
本发明所述步骤(三)中计算总分p的公式中的各评分的权重w1、w2、w3、w4和w5设为均等或根据实际情况人工调整。
[0018]
本发明所述步骤(1)中在agv及其负载的尺寸周围增加agv路径缓冲区的尺寸为5cm,在障碍物周围增加障碍物缓冲区的尺寸为5cm。
[0019]
应当理解,发明内容部分中所描述的内容并非旨在限定本发明的实施例的关键或重要特征,亦非用于限制本发明的范围。本发明的其它特征将通过以下的描述变得容易理解。
[0020]
本发明有益效果:本发明针对agv的路径规划,从路径的复杂度出发,结合工作任务的具体内容和并行任务的影响,提出一种综合性agv路径评估规划方法,(1)从环境、工作任务、协同等多角度进行分析,对产生的路径进行评价,从而帮助从业人员在路径规划阶段选择最佳的路径;(2)本发明考虑到agv在上坡、平地及下坡时运行能耗的区别和转弯时对能耗的影响,减小了agv在工作过程中能量的损耗,同时提高了agv的工作效率;(3)本发明考虑了agv装载货物的尺寸对路径选择的影响,大大减小了任务过程中因货物体积过大而容易与环境障碍发生碰撞的问题;(4)本发明考虑到实际工作环境下优先级复杂多变的需求,使用实数对任务优先级进行表示,以帮助工作人员创建最合理的工作计划;(5)相较于传统的agv路径规划方法,本发明的特点在于结合了工作环境的地面信息和工作任务的具体要求,从路径能耗、路径平滑度、路径障碍、路径占用范围以及任务优先级等多方面进行综合分析,并将这些因素进行量化分析,以帮助工作人员作出最优选择;(6)本发明可以根据工作环境和具体的工作任务需要进行权值调整以选择最适合的路径。
附图说明
[0021]
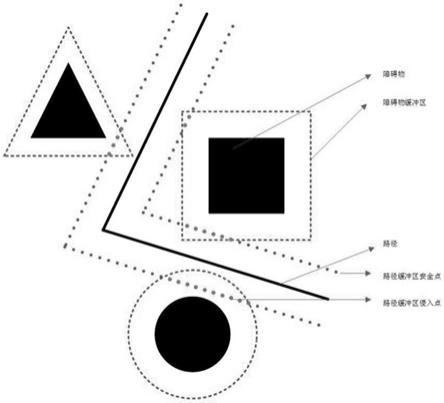
图1为本发明agv路径缓冲区与障碍物缓冲区的示意图。
具体实施方式
[0022]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的全部其他实施例,都属于本发明保护的范围。
[0023]
另外,本文中术语“和/或”,仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。另外,本文中字符“/”,一般表示前后关联对象是一种“或”的关系。
[0024]
本发明针对agv的路径规划,从路径的复杂度出发,结合工作任务的具体内容和并行任务的影响,提出一种综合性agv路径评估规划方法。
[0025]
本发明用于多agv路径规划,帮助从业人员改进和选择最优路径。为了能对运动规划的结果进行衡量,需要一种路径的表示方法,假设agv执行任务具有m条规划路径供选择,在每条路径上等间距设置路径点,假设路径包含n个路径点,该路径表示方法为:path={[x_1,y_1],[x_2,y_2],...,[x_n,y_n]},其中[x_n,y_n]表示第n个路径点所处的位置。
[0026]
本发明主要从以下几个方面来对规划路径进行分析:
[0027]
1、路径能耗最低:agv运动时消耗的能量最低,即agv的路径长度最短和路径的起伏最小。通过提前对工作环境进行建图,可以获得路径中各点的水平高度,从而可以得知路径的起伏。通过建模可以获得agv在平地移动和爬坡时的能耗,从而可以计算agv完成各路径的能耗,具体地:
[0028]
(1)假设路径中上坡、下坡、平地的长度分别为m1,m2,m3,agv上坡、下坡、平地运行单位距离的能耗分别为k1,k2,k3,则agv运行该路径需要的能耗s=k1*m1+k2*m2+k3*m3;
[0029]
(2)对系统生成的m条路径的能耗进行统计,并利用正态分布来为每条路径评分,获得路径能耗评分p1。
[0030]
2、路径最平滑:agv的运动最平滑,即agv在完成路径时尽量少的进行转向,同时尽量避免因地面原因产生的振动。通过计算各路径点的夹角可以统计该路径需要的转向大小和最大转向角度,在已知工作负载可以接受最大的加速度的情况下,可判断agv在运动时是否可满足加速度需求;通过提前对工作环境进行建图,可判断路径的平整度,从而判断agv在运动时产生的振动是否符合需求,具体地:
[0031]
(1)根据agv的特性对agv旋转的角度进行评级,如旋转30度以下评分r1,旋转30-60度评分r2,旋转60-90度评分r3;
[0032]
(2)根据生成的路径中折线路径出现三种等级角度的数量n1,n2,n3来计算平滑性评分p2:p2=r1*n1+r2*n2+r3*n3,其中n1出现旋转30度以下的角度的数量,n2出现旋转30-60度的角度的数量,n3出现旋转60-90度的角度的数量。
[0033]
3、路径避障最优:路径的容错率最高,即规划的路径周围的环境复杂度越低越好,障碍间的路宽越大越好。通过提前对工作环境建图,可对障碍物进行建模,根据agv负载的尺寸进行计算,可得出agv侵入障碍物缓冲区的程度,从而选择更不容易碰撞障碍物的路径,图1示出了本发明agv路径缓冲区与障碍物缓冲区的示意图。具体地:
[0034]
(1)将agv及负载的尺寸周围增加agv路径缓冲区;在障碍物周围增加障碍物缓冲区,agv路径缓冲区和障碍物缓冲区尺寸可设置为5cm;
[0035]
(2)根据路径中各点agv路径缓冲区与障碍物缓冲区的接触面积来计算避障评分:针对路径中的每一个路径点,计算路径点处agv的方向,做关于agv方向的垂线,将垂线与agv路径缓冲区边界的交点作为缓冲区的参考点,计算参考点在障碍物缓冲区的数量;设agv路径的总路径点数为n,而侵入障碍物缓冲区的参考点数量为m,则避障评分p3为p3=1-m/n。
[0036]
4、路径占用范围最小:即在agv运动过程中与其它agv路径冲突的情况越少越好,使用时间帧的方式对环境中所有agv的路径进行存储,当要对agv进行路径规划时,查看每个时间帧中该agv的路径是否与其它agv的路径冲突,若产生冲突则等待下一个时间帧再进入该区域,具体地:
[0037]
(1)获取路径中横、纵坐标的最大值和最小值,求出路径所占用的面积s=(x
max-m
min
)*(y
max-y
min
),其中x
max
和x
min
分别为横坐标的最大值和最小值,y
max
和y
min
分别为纵坐标的最大值和最小值,;
[0038]
(2)再根据路径起点和终点位置计算所占用的最小面积s
min
=|(x
1-x2)*(y
1-y2)|,进而计算该路径的面积占用评分p4=s
min
/s。
[0039]
5、任务优先级最合适:即对agv要执行对任务进行优先级分配,优先级越高的任务则越倾向于用最短的时间完成,优先级越低则越倾向于用低能耗来完成。具体地,根据工作环境对任务优先级的级别数量,设定优先级评分p5。
[0040]
任务优先级从低到高设为0至3间的实数,在创建任务时由人工或自动设置,任务优先级最低的任务评分为0,任务优先级最高的任务评分为3,若任务的优先级层次较多,使用小数进行表时,如优先级评分为2.15的任务较评分为2.09的任务更为优先。
[0041]
6、通过对以上五个评价参数进行加权,则可以获取当前路径的总分p:p=w1*p1+w2*p2+w3*p3+w4*p4+w5*p5,其中w1、w2、w3、w4、w5分别为评分p1、p2、p3、p4和p5的权重,各个评分的权重可设为均等,或根据实际情况进行手动调整权重。
[0042]
尽管已经采用特定于结构特征和/或方法逻辑动作的语言描述了本主题,但是应当理解所附权利要求书中所限定的主题未必局限于上面描述的特定特征或动作。相反,上面所描述的特定特征和动作仅仅是实现权利要求书的示例形式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1