一种FDI攻击下网络化控制系统状态与故障的联合区间估计方法
和d2增益矩阵;
13.将系统(2)中的传感器故障f(k)视为增广状态,得到增广状态向量:
[0014][0015]
并构造如下增广系统:
[0016][0017]
其中:
[0018]018]018][0019][0019][0020]
2)设计增广状态观测器:
[0021][0022]
其中:为增广状态向量x(k)的估计值,t∈r
(n+s)
×
(n+s)
,n∈r
(n+s)
×
p
和l∈r
(n+s)
×
p
为待设计的参数矩阵,且矩阵t∈r
(n+s)
×
(n+s)
,n∈r
(n+s)
×
p
需满足如下等式约束:
[0023][0024]
其中:i
n+s
表示(n+s)
×
(n+s)维单位矩阵;
[0025]
3)增广状态观测器(5)为鲁棒状态观测器的充分条件为:
[0026][0027]
其中:q∈r
(n+s)
×
(n+s)
和y∈r
(n+s)
×
p
是未知矩阵,γ>0是给定的系统性能指标,t和n的表达式为:
[0028][0029][0030]
其中,表示矩阵m的伪逆矩阵,表示矩阵m的伪逆矩阵,表示矩阵m的伪逆矩阵,表示矩阵m的伪逆矩阵,h∈r
(n+s)
×
(n+s+p)
为任意矩阵。
[0031]
给定一个γ>0的指标,利用matlab中的lmi工具箱求解式(7),当存在一个正定矩阵q和矩阵y,使得式(7)成立,则增广状态观测器(5)是鲁棒增广状态观测器,且满足||e(k)||<γ||w(k)||,能够获得非最优的增广状态观测器参数为l=q-1
y;当上述未知变量没有可行解,则增广状态观测器(5)不是鲁棒增广状态观测器,且不能获得非最优的增广状态观测器参数,其中,测器参数,其中,
[0032]
4)状态与故障的联合区间估计
[0033]
根据3)求出增广状态观测器参数为l=q-1
y,得到了增广状态向量的估计值为
进一步地,利用下式可得出受攻击系统的状态与故障的区间上下界:
[0034][0035]
其中:s是矩阵的列数,ω表示复杂度降阶算子,vu和vy为已知的向量。
[0036]
本发明的有益效果:本发明考虑了网络化控制系统中存在的传感器故障、遭受未知但有界的fdi攻击的情况下实现了对系统状态与传感器故障的联合区间估计,相比于传统的点估计方法,本方法对噪声和干扰未知但有界的系统的状态与故障估计均具有较好的精确度。
附图说明
[0037]
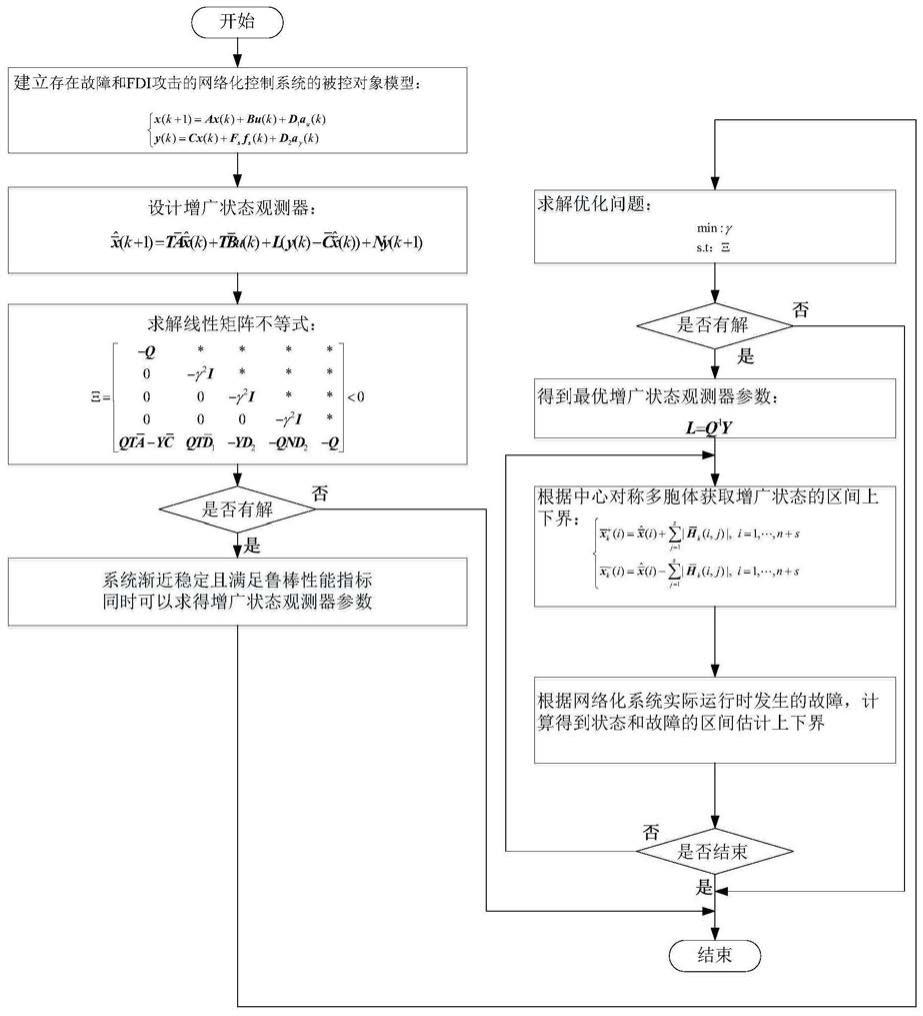
图1是fdi攻击下网络化控制系统状态与故障的联合区间估计方法的流程图。
[0038]
图2是网络化控制系统遭受fdi攻击的结构图。
[0039]
图3是fdi攻击下网络化控制系统传感器故障的区间估计图。
[0040]
图4是fdi攻击下网络化控制系统状态1的区间估计图。
[0041]
图5是fdi攻击下网络化控制系统状态2的区间估计图。
[0042]
图6是fdi攻击下网络化控制系统状态3的区间估计图。
[0043]
图7是fdi攻击下网络化控制系统状态4的区间估计图。
具体实施方式
[0044]
下面结合附图对本发明的具体实施方式做进一步说明。
[0045]
参照附图1,一种fdi攻击下网络化控制系统状态与故障联合区间估计方法,包括以下步骤:
[0046]
步骤1:建立存在系统故障的网络化控制系统的模型
[0047]
建立存在传感器故障的网络化控制系统的被控对象模型:
[0048][0049]
其中:x(k)∈rn是系统的状态向量,u(k)∈rm是系统的输入,y(k)∈r
p
是系统输出,f(k)∈rs是待估计的传感器故障信号,a∈rn×n,b∈rn×m,c∈r
p
×n和f∈r
p
×1。记号rn表示n维欧几里得空间,本发明中出现类似记号的,依此类推即可;rn×m表示n
×
m维实数矩阵的集合,本发明中出现类似记号的,依此类推即可。
[0050]
在fdi攻击下,系统(9)变为:
[0051][0052]
其中:au(k)和ay(k)分别是执行器和传感器遭受的未知但有界的fdi攻击信号,d1和d2增益矩阵。
[0053]
将系统(10)中的传感器故障f(k)视为增广状态,得到增广状态向量:
[0054][0055]
并构造如下增广系统:
[0056][0057]
其中:
[0058]058]058][0059][0059][0060]
步骤2:设计增广状态观测器
[0061][0062]
其中:为增广状态向量x(k)的估计值,t∈r
(n+s)
×
(n+s)
,n∈r
(n+s)
×
p
和l∈r
(n+s)
×
p
为待设计的参数矩阵,且矩阵t∈r
(n+s)
×
(n+s)
,n∈r
(n+s)
×
p
需满足如下等式约束:
[0063][0064]
其中:i
n+s
表示(n+s)
×
(n+s)维单位矩阵。
[0065]
步骤3:增广状态观测器(13)为鲁棒增广状态观测器的充分条件为
[0066][0067]
其中:q∈r
(n+s)
×
(n+s)
和y∈r
(n+s)
×
p
是未知矩阵,γ>0是给定的系统性能指标,t和n的表达式为:
[0068][0069]
其中,表示矩阵m的伪逆矩阵,表示矩阵m的伪逆矩阵,表示矩阵m的伪逆矩阵,表示矩阵m的伪逆矩阵,h∈r
(n+s)
×
(n+s+p)
为任意矩阵。
[0070]
由式(14),则如下等式成立:
[0071][0072]
定义由式(13)和式(17)可得:
[0073][0074]
为了简化符号,将式(18)写成如下形式:
[0075]
[0076]
其中:
[0077][0078][0079][0080]
由有界实引理有,对于给定标量γ>0,当存在一个对称正定矩阵q使得如下不等式成立:
[0081][0082]
则误差系统(19)稳定,且满足||e(k)||<γ||w(k)||,对式(20)运用schur补引理有:
[0083][0084]
将将代入式子(21),并令y=ql,则有:
[0085][0086]
此外,式子(14)的广义解为:
[0087][0088][0089]
其中,s∈r
(n+s)
×
(n+s+p)
为任意矩阵。经过上述分析,容易得到t和n的表达式:
[0090][0091][0092]
其中,表示矩阵m的伪逆矩阵,表示矩阵m的伪逆矩阵,表示矩阵m的伪逆矩阵,表示矩阵m的伪逆矩阵,h∈r
(n+s)
×
(n+s+p)
为任意矩阵。
[0093]
给定一个γ>0的指标,利用matlab中的lmi工具箱求解式(15),当存在一个正定矩阵q和矩阵y,使得式(15)成立,则增广状态观测器(13)是鲁棒状态观测器,且满足||e(k)||<γ||w(k)||,能够获得非最优的增广状态观测器参数为l=q-1
y;当上述未知变量没有可行解,则增广状态观测器(5)不是鲁棒增广状态观测器,且不能获得非最优的增广状态观
测器参数,不能执行步骤4,
[0094]
步骤4:实现状态与故障的联合区间估计
[0095]
根据3)求出增广状态观测器参数为l=q-1
y,得到了增广状态向量的估计值为进一步地,利用下式可得出受攻击系统的状态与故障的区间上下界:
[0096][0097]
其中:s是矩阵的列数,ω表示复杂度降阶算子,vu和vy为已知的向量。
[0098]
当由有:
[0099][0100]
对e(k+1)进行迭代计算则有:
[0101][0102]
注意到,其中,au(k)∈《0,vu》ay(k)∈《0,wy》和则可得:进一步得到e(k)的区间估计表达式:
[0103][0104]
其中,表示第i行第j列元素的绝对值。
[0105]
根据能够得到增广状态的区间估计上下界为:
[0106][0107]
实施例:
[0108]
采用本发明提出的一种fdi攻击下网络化控制系统状态与故障的联合区间估计方法,在考虑fdi攻击和传感器故障的情况下,对网络化控制系统状态与故障进行联合区间估计。具体实现方法如下:
[0109]
考虑具有传感器故障的网络化控制系统遭受攻击者发起fdi攻击的模型为式(10),遭受攻击的系统结构图见附图2,给定其系统参数为:
[0110][0110][0110]
[0111][0111][0111][0112]
这里取输入向量u(k)=[0.2 0.2]
τ
,fdi攻击信号的边界信息分别为|au(k)|≤0.05和|ay(k)|≤[0.035 0.035]
τ
,取系统的初始状态为x(0)=[0.2 0.2 0.2 0.2]
τ
。在仿真中,取s为:
[0113][0114]
考虑如下形式的故障:
[0115][0116]
利用上述给出的条件,通过matlab中的lmi工具箱,对式(15)求解得出增广状态观测器(13)的参数如下所示:
[0117][0117][0117][0118]
利用上述参数能够得到增广状态,进一步地,利用式(20),能够同时得到系统状态和故障的估计上界和下界,估计结果见附图3、附图4、附图5、附图6和附图7所示。
[0119]
从仿真结果看,本发明在考虑了网络化控制系统中存在的传感器故障、遭受未知但有界的fdi攻击的情况下,实现了对系统状态与传感器故障的联合区间估计。本发明对其他噪声和干扰未知但有界的系统的状态与故障区间估计均具有较好的效果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1