一种引力波探测航天器姿态自主规划方法
1.本发明涉及一种航天器姿态自主规划方法,尤其涉及适用于引力波探测任务航天器姿态自主规划方法,属于航空航天技术领域。
背景技术:
2.姿态规划是实现引力波探测的关键技术,在引力波探测任务中具有重要的应用价值。由于引力波探测任务要求三颗器航天器建立满足等边三角形构型的长期稳定轨道构型并使航天器姿态与位置满足强耦合性关系,引力波探测航天器的姿态规划问题呈强非线性特征。一方面,如何求解该问题,获得时间最优的姿态机动序列是引力波探测航天器姿态规划需要解决的难点;另一方面,引力波探测任务区域距地球约107km,与地面通信存在200s的时间延迟,这要求航天器具备自主姿态规划的能力,对姿态规划方法的鲁棒性和计算效率要求较高,如何实现提高姿态规划的鲁棒性和计算效率也是需要解决的关键问题。引力波探测任务的姿态规划是当前科研人员关注的热点问题之一。
3.在已发展的姿态规划方法中,在先技术[1](z.wang,r.xu,rapid search method for a spacecraft attitude maneuver path with multiple constraints,aerospace science and technology,2021),针对姿态规划问题提出了随机分叉树(rrt)方法,通过在给定的初始状态与初始时刻下对姿态控制律进行随机规划,逐层筛选可行的姿态规划序列。该方法的优点是鲁棒性较高,计算效率较快,但无法优化性能指标,无法控制姿态机动结束时间的取值范围,难以适用于引力波探测任务。
[0004]
在先技术[2]r.dai,c.sun,path planning of spatial rigid motion with constrained attitude,journal of guidance,control,and dynamics,2015),将姿态规划问题建立为了一个非线性规划问题,并通过变量代换将其转化为了一个二次约束二次规划问题(qcqp)。通过使用一组半正定规划问题近似该qcqp实现问题的凸化,应用凸优化方法序列求解该问题。该方法能够建立较为真实的姿态规划模型,可以优化性能指标并约束终端时间的取值。然而,该方法计算效率低,算法效率对迭代计算的鲁棒性差,受初始猜测的敏感性大,难以适用于对鲁棒性要求较高的引力波探测任务。
技术实现要素:
[0005]
为解决现有方法进行引力波探测航天器姿态规划中难以兼顾效率与鲁棒性的问题,本发明的主要目的是提供一种引力波探测航天器姿态自主规划方法,实现引力波探测任务中航天器自主姿态规划,在保证建模真实、求解鲁棒的前提下,提高姿态规划效率,解决引力波探测任务姿态规划应用相关技术问题。所述相关技术问题包括实现引力波探测任务姿态控制实时跟踪与滚动优化。
[0006]
本发明的目的是通过下述技术方案实现的:
[0007]
本发明公开的一种引力波探测航天器姿态自主规划方法,根据引力波探测任务的轨道与姿态强耦合特性,构建带有终端状态强非线性约束的时间最省姿态规划问题;在该
问题中,应用曲线拟合技术将终端状态约束拟合为时间与四元数的多项式函数;在此基础上,通过引入增广变量将该问题转化为带有矩阵约束的qcqp问题;使用一个半正定约束对该矩阵约束进行松弛,并在性能指标中额外引入惩罚项对该约束的松弛程度进行最小化,得到一个近似凸优化问题;通过迭代求解该问题,获得原问题的最优姿态机动序列。本发明中的近似过程具备凹收敛性质,即能够保证算法不依赖于初始猜测并具备快速收敛的性质,适用于引力波探测任务对鲁棒性与规划效率的要求。
[0008]
本发明公开的一种引力波探测航天器姿态自主规划方法,包括如下步骤:
[0009]
步骤一,根据引力波探测轨道,获取终端时间与四元数耦合关系,构建带有终端耦合性约束的姿态规划问题。
[0010]
引力波探测任务轨道是引力波探测姿态规划部分的一个输入,该输入可以视作一个三维空间位置与时间的函数。定义引力波探测轨道的位置状态为ri(t),其中t表示时间,i∈{i,ii,iii}表示航天器编号。通过ri(t)计算得到在任意时刻下任意两颗航天器的相对位置单位矢量,表示为γ
i,i+1
(t)
[0011][0012]
基于此相对位置单位矢量,解算每颗航天器的时序期望姿态指向,即某颗航天器的激光载荷应在终端时刻指向另一个航天器。该期望姿态指向用姿态俯仰角θ
i,i+1
与姿态偏航角表示。
[0013][0014]
其中,符号γ
i,i+1,x
(t)表示单位矢量在惯性系x轴方向上的投影,符号γ
i,i+1,y
(t)表示单位矢量在惯性系y轴方向上的投影,符号γ
i,i+1,z
(t)表示单位矢量在惯性系z轴方向上的投影。根据姿态角,获得航天器在任意时刻下的姿态四元数,表示为q
ref
(t)。通过对q
ref
(t)进行n次多项式拟合,得到终端四元数约束表示为多项式函数,即
[0015]
q(tf)=p
{n}
(tf)
[0016]
其中,tf表示姿态机动的终止时刻,p
{n}
表示次数为n的多项式函数。
[0017]
于是,对于任意一颗航天器,构建以时间最省为优化指标,带有动力学约束、边界条件、终端约束、控制力矩约束以及归一化约束的引力波探测任务姿态规划问题,表示为p1。
[0018]
问题p1
[0019]
minimize
[0020][0021]
subject to
[0022][0023]
[0024]
q(t0)=q0,ω(t0)=ω0,ω(tf)=ωf[0025]
q(tf)=p
{n}
(tf)
[0026]
||u||≤u
max
[0027]
||q||=1
[0028]
其中:表示问题p1的性能指标,q为航天器姿态四元数,ω为航天器姿态角速度,m表示航天器三轴转动惯量,u表示航天器姿态控制力矩,q0、qf、ω0、ωf分别表示航天器的初始姿态四元数、终端姿态四元数、初始姿态角速度以及终端姿态角速度,u
max
为航天器容许的最大姿态控制力矩,矩阵ω(ω)有如下表达形式
[0029][0030]
其中,ω1、ω2、ω3分别表示矢量ω的三轴分量。
[0031]
步骤二,引入增广变量,对该问题进行变量代换,将原姿态规划问题转化为带有一个非凸矩阵约束的固定时间qcqp问题。
[0032]
问题p1是一个带有结构非凸项,即时间自由的最优控制问题。首先将该问题转化为固定时间问题。定义新变量τ满足如下关系
[0033][0034]
将上述方程带入问题p1中,得到新自变量τ下的最优控制问题,表示为问题p2。
[0035]
问题p2
[0036]
minimize
[0037][0038]
subject to
[0039][0040][0041]
以及除动力学约束外问题p1中的全部约束
[0042]
其中:表示问题p2的性能指标。
[0043]
于是,问题p2的设计变量表示为
[0044]
x=(q
t
,ω
t
,u
t
,tf)
t
[0045]
定义增广变量
[0046]
y=(x
11
×
1t
,a
19
×
1t
,d
(n-1)
×
1t
,1)(x
11
×
1t
,a
19
×
1t
,d
(n-1)
×
1t
,1)
t
[0047]
其中:d
(n-1)
×1表示n-1维的由终端多项式约束因式分解得到的变量,a
19
×1表示19维的新定义变量,其具体形式为
[0048][0049]
于是问题p2可以转化为如下固定时间的最优控制问题,其满足二次约束二次规划
问题(qcqp)的基本形式,表示为问题p3。
[0050]
问题p3
[0051]
minimize
[0052]jp3
=trace(ym0)
[0053]
subject to
[0054]
trace(yg0)+g1y≤0
[0055][0056]
其中:j
p3
为问题p3的性能指标,m0、g0、g1均表示问题的系数矩阵,为增广变量y的前37+n维分块矩阵,y有如下定义
[0057]
y=(x
11
×
1t
,a
19
×
1t
,d
(n-1)
×
1t
)
t
[0058]
步骤三,在给定初始猜测附近,对qcqp问题中的矩阵约束进行松弛与惩罚处理,获得近似凸优化问题,提高计算效率。
[0059]
为了凸化问题p3以获取快速计算的性质,定义新约束
[0060][0061]
该约束为原矩阵等式约束的松弛形式,对于任意一个原约束的可行解,该松弛均满足。
[0062]
进一步,给定初始猜测定义惩罚项
[0063][0064]
其中:η与ζ表示惩罚系数。
[0065]
将此惩罚项加入到性能指标内,可以获得近似的凸优化问题,表示为问题p4。
[0066]
问题p4
[0067]
minimize
[0068][0069]
subject to
[0070]
trace(yg0)+g1y≤0
[0071][0072]
其中:j
p4
为问题p4的性能指标。
[0073]
步骤四,重复步骤三,并求解所得凸优化问题,直至获得收敛的迭代解,该迭代解即为原问题的最优解,所述最优解即为引力波探测航天器姿态自主规划获取的引力波探测航天器最优姿态机动序列。
[0074]
给定算法初始猜测y
{k}
,重复步骤三,得到近似凸优化问题p4,调用凸优化求解器求解问题p4获得对y
{k}
进行更新。重复此过程直至满足如下收敛指标。
[0075]
||y
{k+1}-y
{k}
||<ε
[0076]
|trace(y
{k+1}
)-2y
{k}ty{k+1}
+y
{k}ty{k}
|<ε
[0077]
若序列{y
{k}
}收敛,则收敛解即为原问题p1的最优解,所述最优解即为引力波探测航天器姿态自主规划获取的引力波探测航天器最优姿态机动序列。
[0078]
还包括步骤五:根据步骤四获取的引力波探测航天器最优姿态机动序列,解决引
力波探测任务姿态规划应用相关技术问题。所述问题包括实现引力波探测任务姿态控制实时跟踪与滚动优化。
[0079]
有益效果:
[0080]
1、本发明公开的一种引力波探测航天器姿态自主规划方法,根据引力波探测任务的轨道与姿态强耦合特性,构建带有终端状态强非线性约束的时间最省姿态规划问题。在该问题中,应用曲线拟合技术将终端状态约束拟合为时间与四元数的多项式函数。在此基础上,通过引入增广变量将该问题转化为带有一个矩阵约束的qcqp问题。使用一个半正定约束对该矩阵约束进行松弛,并在性能指标中额外引入惩罚项对该约束的松弛程度进行最小化,得到一个近似凸优化问题。通过迭代求解该问题,获得原问题的最优姿态机动序列。由于本发明所述方法的序列凸化属性,本发明规划效率较高,能够满足引力波探测任务需求。
[0081]
2、本发明公开的一种引力波探测航天器姿态自主规划方法,通过对原问题进行序列惩罚与松弛改造,使引力波探测航天器姿态自主规划方法不依赖于初始猜测并具备快速收敛的性质,具备较高的鲁棒性,适用于引力波探测任务需求。
附图说明
[0082]
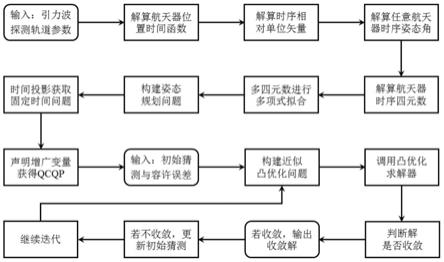
图1为本发明公开的一种引力波探测航天器姿态自主规划方法流程图;
[0083]
图2为引力波探测任务终端四元数多项式拟合仿真图;
[0084]
图3为引力波探测任务三星四元数曲线仿真图;
[0085]
图4为引力波探测任务三星姿态角速度曲线仿真图;
[0086]
图5为引力波探测任务三星姿态控制力矩曲线仿真图。
具体实施方式
[0087]
为了更好的说明本发明的目的和优点,下面结合附图和实例对发明内容做进一步说明。
[0088]
实施例1:引力波探测任务航天器姿态规划问题。
[0089]
如图1所示,本实施例公开的一种引力波探测航天器姿态自主规划方法,具体步骤如下:
[0090]
步骤一,根据引力波探测轨道,获取终端时间与四元数耦合关系。
[0091]
引力波探测任务轨道是引力波探测姿态规划部分的一个输入,该输入可以视作一个三维空间位置与时间的函数。定义引力波探测轨道的位置状态为ri(t),其中t表示时间,i∈{i,ii,iii}表示航天器编号。通过ri(t),可以计算得到在任意时刻下任意两颗航天器的相对位置单位矢量,表示为γ
i,i+1
(t)
[0092][0093]
基于此相对位置单位矢量,可以解算每颗航天器的时序期望姿态指向,即某颗航天器的激光载荷应在终端时刻指向另一个航天器。该期望姿态指向用姿态俯仰角θ
i,i+1
与姿态偏航角表示。
[0094][0095]
其中,符号γ
i,i+1,x
(t)表示单位矢量在惯性系x轴方向上的投影,符号γ
i,i+1,y
(t)表示单位矢量在惯性系y轴方向上的投影,符号γ
i,i+1,z
(t)表示单位矢量在惯性系z轴方向上的投影。根据姿态角,可以获得航天器在任意时刻下的姿态四元数,表示为q
ref
(t)。通过对q
ref
(t)进行n次多项式拟合,可以得到终端四元数约束表示为多项式函数,即
[0096]
q(tf)=p
{n}
(tf)
[0097]
其中,tf表示姿态机动的终止时刻,p
{n}
表示次数为n的多项式函数。
[0098]
该多项式函数的拟合情况如图2所示。
[0099]
步骤二,构建带有终端耦合性约束的姿态规划问题。
[0100]
于是,对于任意一颗航天器,可以构建以时间最省为优化指标,带有动力学约束、边界条件、终端约束、控制力矩约束以及归一化约束的引力波探测任务姿态规划问题,表示为p1。
[0101]
问题p1
[0102]
minimize
[0103][0104]
subject to
[0105][0106][0107]
q(t0)=q0,ω(t0)=ω0,ω(tf)=ωf[0108]
q(tf)=p
{n}
(tf)
[0109]
||u||≤u
max
[0110]
||q||=1
[0111]
其中:表示问题p1的性能指标,q为航天器姿态四元数,ω为航天器姿态角速度,m表示航天器三轴转动惯量,u表示航天器姿态控制力矩,q0、qf、ω0、ωf分别表示航天器的初始姿态四元数、终端姿态四元数、初始姿态角速度以及终端姿态角速度,u
max
为航天器容许的最大姿态控制力矩,矩阵ω(ω)有如下表达形式
[0112][0113]
其中,ω1、ω2、ω3分别表示矢量ω的三轴分量。
[0114]
步骤三,将原时间自变量投影到固定数轴,获取固定时间的姿态规划问题。
[0115]
问题p1是一个带有结构非凸项,即时间自由的最优控制问题。首先将该问题转化为固定时间问题。定义新变量τ满足如下关系
[0116]
[0117]
将上述方程带入问题p1中,得到新自变量τ下的最优控制问题,表示为问题p2。
[0118]
问题p2
[0119]
minimize
[0120][0121]
subject to
[0122][0123][0124]
以及除动力学约束外问题p1中的全部约束
[0125]
其中:表示问题p2的性能指标。
[0126]
步骤四,引入增广变量,将原姿态规划问题转化为带有一个非凸矩阵约束的固定时间qcqp问题。
[0127]
于是,问题p2的设计变量表示为
[0128]
x=(q
t
,ω
t
,u
t
,tf)
t
[0129]
定义增广变量
[0130]
y=(x
11
×
1t
,a
19
×
1t
,d
(n-1)
×
1t
,1)(x
11
×
1t
,a
19
×
1t
,d
(n-1)
×
1t
,1)
t
[0131]
其中:d
(n-1)
×1表示n-1维的由终端多项式约束因式分解得到的变量,a
19
×1表示19维的新定义变量,其具体形式为
[0132][0133]
于是问题p2可以转化为如下固定时间的最优控制问题,其满足二次约束二次规划问题(qcqp)的基本形式,表示为问题p3。
[0134]
问题p3
[0135]
minimize
[0136]jp3
=trace(ym0)
[0137]
subject to
[0138]
trace(yg0)+g1y≤0
[0139][0140]
其中:j
p3
为问题p3的性能指标,m0、g0、g1均表示问题的系数矩阵,为增广变量y的前37+n维分块矩阵,y有如下定义
[0141]
y=(x
11
×
1t
,a
19
×
1t
,d
(n-1)
×
1t
)
t
[0142]
步骤五,给定算法参数。
[0143]
选取初始时间为0s,终端时间为30s,初始四元数与角速度见表格1的无控积分轨迹作为初始猜测,定义算法容许误差为1
×
10-3
,执行步骤六。
[0144]
表格1:三颗航天器的初始状态
[0145]
[0146][0147]
步骤六,在给定初始猜测附近,对qcqp问题中的矩阵约束进行松弛与惩罚处理,获得近似凸优化问题,提高计算效率。
[0148]
为了凸化问题p3以获取快速计算的性质,定义新约束
[0149][0150]
该约束为原矩阵等式约束的松弛形式,对于任意一个原约束的可行解,该松弛均满足。
[0151]
进一步,给定初始猜测定义惩罚项
[0152][0153]
其中:η与ζ表示惩罚系数。
[0154]
将此惩罚项加入到性能指标内,可以获得近似的凸优化问题,表示为问题p4。
[0155]
问题p4
[0156]
minimize
[0157][0158]
subject to
[0159]
trace(yg0)+g1y≤0
[0160][0161]
其中:j
p4
为问题p4的性能指标。
[0162]
步骤七,调用凸优化求解器获得迭代解。
[0163]
步骤八,判断算法是否收敛。
[0164]
算法的收敛指标如下:
[0165]
||y
{k+1}-y
{k}
||<ε
[0166]
|trace(y
{k+1}
)-2y
{k}ty{k+1}
+y
{k}ty{k}
|<ε
[0167]
其中:ε为算法的容许误差。
[0168]
若收敛指标满足,则执行步骤十;
[0169]
反之,若收敛指标不满足,则执行步骤九。
[0170]
步骤九,更新初始猜测,返回步骤五。
[0171]
步骤十,收敛的迭代解,该迭代解即为原问题的最优解,所述最优解即为引力波探测航天器姿态自主规划获取的引力波探测航天器最优姿态机动序列。
[0172]
步骤十一:根据步骤十获取的引力波探测航天器最优姿态机动序列,解决引力波探测任务姿态规划应用相关技术问题。所述问题包括实现引力波探测任务姿态控制实时跟踪与滚动优化。
[0173]
以上所述的具体描述,对发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明
的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1