动力总成域控制器、控制系统及车辆的制作方法
1.本发明涉及域控制器,具体涉及一种动力总成域控制器、控制系统及车辆。
背景技术:
2.随着车辆电子化、智能化、网联化程度的逐渐提高,为实现信号处理逻辑运算、辅助驾驶的域控制器的数量也越来越多。动力总成域控制器是一种智能化的动力总成管理单元,借助控制器局域网络(can)、端口物理层(phy)实现变速器管理、引擎管理、电池监控和交流发电机调节。其他实现辅助驾驶的域控制器需要与动力总成域控制器通信以协同工作,向动力总成域控制器发送运动控制命令,引导车辆运动,且达到一定的精度要求。当前,动力总成域控制器和其他域控制器分别布设在车辆的不同位置,导致逻辑控制繁杂、线束布设复杂,在愈发庞杂的线路中,保证信号处理以及网络安全的最优化成为难题。
技术实现要素:
3.鉴于上述问题,本发明提供一种动力总成域控制器、控制系统及车辆,用于改善动力总成域控制器和其他域控制器分别布设在车辆不同位置导致的逻辑控制繁杂以及线束布设复杂的情况。
4.第一方面,本发明提供一种动力总成域控制器,该动力总成域控制器包括连接器以及动力总成域控制器主板;所述连接器为板对板连接器的其中一方,用于连接扩展域控制器主板;动力总成域控制器主板包括微控制单元,所述微控制单元配置成通过所述连接器获取运动控制指令,还配置成通过所述连接器输出所述扩展域控制器主板的上下电时序控制指令和工作模式控制指令。
5.在一个或多个实施例中,所述动力总成域控制器主板还包括电源模块,所述动力总成域控制器主板还配置成通过所述连接器将所述电源模块的电能输出到所述扩展域控制器主板。
6.在一个或多个实施例中,所述动力总成域控制器还包括机箱,所述机箱用于容纳所述动力总成域控制器主板、所述连接器和所述扩展域控制器主板。
7.在一个或多个实施例中,所述连接器用于连接全景环视域控制器主板。
8.第二方面,本发明提供一种车辆,其包括上述实施例中的动力总成域控制器。
9.第三方面,本发明提供一种控制系统,该控制系统包括扩展域控制器主板、板对板连接器和动力总成域控制器主板,所述动力总成域控制器主板通过所述板对板连接器可拆卸地连接所述扩展域控制器主板;所述动力总成域控制器主板包括微控制单元,所述微控制单元通过所述板对板连接器输出上下电时序控制指令和工作模式控制指令到所述扩展域控制器主板,所述扩展域控制器主板通过所述板对板连接器输出运动控制指令到所述微控制单元。
10.在一个或多个实施例中,所述动力总成域控制器主板还包括电源模块,所述动力总成域控制器主板通过所述板对板连接器将所述电源模块的电能输出到所述扩展域控制
器主板。
11.在一个或多个实施例中,所述控制系统还包括机箱,所述机箱容纳所述动力总成域控制器主板、所述板对板连接器以及所述扩展域控制器主板。
12.在一个或多个实施例中,所述扩展域控制器主板为所述全景环视域控制器主板。
13.第四方面,本发明提供一种车辆,其包括上述实施例中的控制系统。
14.本发明的实施例至少具备下列之一有益效果:
15.1、通过在动力总成域控制器主板上设置用于连接扩展域控制器主板的连接器,使得动力总成域控制器主板可与扩展域控制器主板连接进行数据交互从而协同工作,实现动力总成域控制器的扩展性。
16.2、设置动力总成域控制器主板通过板对板连接器连接扩展域控制器主板,避免二者之间的线束连接,不会导致线束布设复杂。
17.3、设置动力总成域控制器主板输出扩展域控制器主板的上下电时序控制指令和工作模式控制指令,减少扩展域控制器主板上负责该工作的微控制单元的设置,降低了成本,同时方便管理。
18.4、设置动力总成域控制器主板通过连接器为扩展域控制器主板供电,减少扩展域控制器主板上的电源模块以及电源连接器的设置,方便管理。
19.5、设置机箱用于容纳动力总成域控制器主板和扩展域控制器主板,减少机箱的数量,方便管理。
附图说明
20.本发明的上述的以及其他的特征、性质和优势将通过下面结合附图和实施例的描述而变得更加明显,其中:
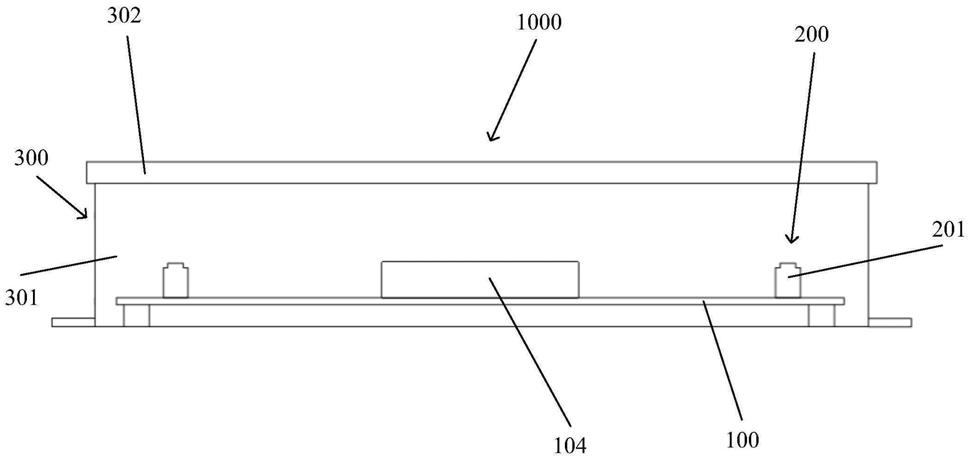
21.图1为实施例一的动力总成域控制器的结构示意图;
22.图2为实施例一的动力总成域控制器主板的结构示意图;
23.图3为实施例三的控制系统的结构示意图;
24.图4为实施例三的动力总成域控制器主板的结构示意图;
25.图5为实施例三的全景环视域控制器主板的结构示意图。
26.附图标记:
27.1000-动力总成域控制器;
28.100-动力总成域控制器主板,101-微控制单元,102-电源模块,103-电源管理集成电路模块,104-主连接器,105-高边驱动器,106-低边驱动器,107-控制器局域网络收发器,108-局域网收发器,109-局域互联网络收发器,110-实时时钟;
29.200-连接器,201-母头;
30.300-机箱,301-箱体,302-盖板;
31.4000-控制系统;
32.500-动力总成域控制器主板,501-微控制单元,502-电源模块,503-电源管理集成电路模块,504-主连接器,505-高边驱动器,506-低边驱动器,507-控制器局域网络收发器,508-局域网收发器,509-局域互联网络收发器,510-实时时钟;
33.600-板对板连接器,601-母头,602-公头;
34.700-全景环视域控制器主板,701-摄像头连接器,702-超声波雷达连接器,703-解码器,704-处理器,705-电压比较器,706-电源管理集成电路模块,707-内存,708-存储器;
35.800-机箱,801-箱体,802-盖板。
具体实施方式
36.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明还可以采用其它不同于在此描述的其它方式来实施,因此本发明不受下面公开的具体实施例的限制。
37.本技术所示,除非上下文明确提示例外情形,“一”、“一个”、“一种”和/或“该”等词并非特指单数,也可包括复数。一般说来,术语“包括”与“包含”仅提示包括已明确标识的步骤和元素,而这些步骤和元素不构成一个排它性的罗列,方法或者设备也可能包含其他的步骤或元素。
38.实施例一
39.图1到图2示出实施例一。如图1所示,动力总成域控制器1包括动力总成域控制器主板100、连接器200以及机箱300。
40.如图1和图2所示,连接器200用于连接扩展域控制器主板,下面以连接扩展域控制器主板为全景环视域控制器主板为例进行说明,连接器200设置在动力总成域控制器主板100平面上的两侧,并突伸于动力总成域控制器主板100的平面。连接器200为板对板连接器的其中一方,具体为母头201,用于被全景环视域控制器主板上的板对板连接器的公头插入,以同时实现动力总成域控制器主板100与全景环视域控制器主板的电连接和机械连接。在另一个或多个实施例中,连接器200具体为公头,用于插入全景环视域控制器主板上的板对板连接器的母头,以同时实现动力总成域控制器主板100与全景环视域控制器主板的电连接和机械连接。设置动力总成域控制器主板100通过板对板连接器连接全景环视域控制器主板,避免二者之间的线束连接,不会导致线束布设复杂。
41.如图2所示,动力总成域控制器主板100包括微控制单元101(mcu),微控制单元101配置成通过连接器200获取运动控制指令,以控制车辆运动,实现辅助驾驶功能,以辅助驾驶功能中的自动泊车功能为例,全景环视域控制器基于超声波雷达和全景影像搜索车辆周边环境,寻找其它停放车辆之间适当的停车位或地面车位标记,并根据驾驶员的选择自动或手动确定目标车位,计算自动泊车轨迹,得出横向及纵向运动控制指令,微控制单元101通过连接器200从与连接器200连接的全景环视域控制器主板获取该运动控制指令,并控制车辆停放在目标泊车位置,并达到一定的位置精度要求。
42.微控制单元101还配置成通过连接器200输出全景环视域控制器主板的上下电时序控制指令和工作模式控制指令,以实现全景环视域控制器主板的上下电时序和工作模式的控制。这减少全景环视域控制器主板用来控制上下电时序和工作模式的微控制单元,降低了成本,同时方便管理。
43.具体地,连接器200引出微控制单元101的双向二线制同步串行信号(iic信号)、串行外围信号(spi信号)和使能信号(en信号),以使微控制单元101获取运动控制指令以及输出全景环视域控制器主板的上下电时序控制指令和工作模式控制指令。
44.除获取运动控制指令以及输出上下电时序控制指令和工作模式控制指令外,微控
制单元101还实现动力总成域控制器主板100的数据处理与控制。
45.如图2所示,动力总成域控制器主板100还包括电源模块102,动力总成域控制器主板100还配置成通过连接器200将电源模块102的电能输出到全景环视域控制器主板。这减少全景环视域控制器主板上的电源模块以及电源连接器的设置,方便管理。
46.除给全景环视域控制器主板提供电能外,电源模块102还为动力总成域控制器主板100提供电能。具体地,如图2所示,动力总成域控制器主板100还包括电源管理集成电路模块103(pmic)和主连接器104,主连接器104外接电源线缆实现动力总成域控制器主板100的供电,电源模块102将外接的车载电源电压转换为稳定的12v直流电压,电源管理集成电路模块103将该12v直流电压转换为动力总成域控制器主板100上相关器件所需的电压。
47.如图2所示,动力总成域控制器主板100还包括高边驱动器105、低边驱动器106、控制器局域网络收发器(can收发器)107、局域网收发器(lan收发器)108、局域互联网络收发器(lin收发器)109以及实时时钟(rtc时钟)110。控制器局域网络收发器107实现控制器局域网络(can)数据链路层与物理层之间的数据转换。局域网收发器108实现局域网(lan)数据链路层与物理层之间的数据转换。局域互联网络收发器109实现局域互联网络(lin)数据链路层与物理层之间的数据转换。高边驱动器105和低边驱动器106实现电池水泵、ptc供电继电器、暖风泵、风扇供电继电器、制动真空泵继电器以及压缩机供电继电器的控制。实时时钟110实现准确计时。
48.主连接器104还外接控制器局域网络线缆(can线缆)、局域网线缆(lan线缆)以及高低边驱动线缆实现车辆通信与控制。
49.如图1所示,机箱300用于容纳动力总成域控制器主板100、连接器200和全景环视域控制器主板。具体地,机箱300包括箱体301和盖板302,盖板302盖合箱体301的开口以形成长方体容纳空间,用于容纳动力总成域控制器主板100、连接器200和全景环视域控制器主板。设置机箱300用于容纳动力总成域控制器主板100和全景环视域控制器主板,无需单独为全景环视域控制器主板配置机箱,减少机箱的数量,方便管理。
50.通过在动力总成域控制器主板100上设置用于连接全景环视域控制器主板的连接器200,使得动力总成域控制器主板100可与全景环视域控制器主板连接进行数据交互从而协同工作,实现动力总成域控制器1000的扩展性。当全景环视域控制器主板不通过连接器200连接动力总成域控制器主板100时,动力总成域控制器主板100独立工作,功能性能正常。当全景环视域控制器主板通过连接器200连接动力总成域控制器主板100时,动力总成域控制器主板100与全景环视域控制器主板进行数据交互从而协同工作,实现自动泊车等辅助驾驶功能。
51.在本实施例中,扩展域控制器主板以全景环视域控制器主板为例进行说明,连接器200用于连接全景环视域控制器主板。在另一个或多个实施例中,连接器200用于连接其他扩展域控制器主板。
52.实施例二
53.一种车辆,该车辆包括实施例一中所述的动力总成域控制器,实现了动力总成域控制器的扩展性,避免了动力总成域控制器和扩展域控制器间复杂的线束连接,还减少了扩展域控制器主板用来控制上下电时序和工作模式的微控制单元,减少了扩展域控制器主板上的电源模块以及电源连接器的设置,减少了单独为扩展域控制器主板配置的机箱,降
低了成本,同时方便管理。
54.实施例三
55.图3到图5示出实施例三。如图3所示,控制系统4000包括扩展域控制器主板、板对板连接器600、动力总成域控制器主板500和机箱800,下面以扩展域控制器主板为全景环视域控制器主板700为例进行说明。
56.如图3到图5所示,动力总成域控制器主板500通过板对板连接器600可拆卸地连接全景环视域控制器主板700。具体地,板对板连接器600包括母头601和公头602,母头601设置在动力总成域控制器主板500平面上的两侧,并突伸于动力总成域控制器主板500的平面,公头602设置在全景环视域控制器主板700平面上的两侧,并突伸于动力总成域控制器主板500的平面,母头601和公头602在位置上对应,全景环视域控制器主板700的公头602插入动力总成域控制器主板500的母头601,以同时实现全景环视域控制器主板700与动力总成域控制器主板500的电连接和机械连接。在另一个或多个实施例中,动力总成域控制器主板500上设置板对板连接器600的公头,全景环视域控制器主板700上设置板对板连接器600的母头,动力总成域控制器主板500的公头插入全景环视域控制器主板700的母头,以同时实现全景环视域控制器主板700与动力总成域控制器主板500的电连接和机械连接。设置动力总成域控制器主板500通过板对板连接器600连接全景环视域控制器主板700,避免二者之间的线束连接,不会导致线束布设复杂。
57.如图4所示,动力总成域控制器主板500包括微控制单元501(mcu),全景环视域控制器主板700通过板对板连接器600输出运动控制指令到微控制单元501,以控制车辆运动,实现辅助驾驶功能,以辅助驾驶功能中的自动泊车功能为例,全景环视域控制器基于超声波雷达和全景影像搜索车辆周边环境,寻找其它停放车辆之间适当的停车位或地面车位标记,并根据驾驶员的选择自动或手动确定目标车位,计算自动泊车轨迹,发送横向及纵向运动控制指令到动力总成域控制器,引导车辆停放在目标泊车位置,并达到一定的位置精度要求。具体地,如图5所示,全景环视域控制器主板700包括摄像头连接器701、超声波雷达连接器702、解码器703、处理器704和电压比较器705,摄像头连接器701外接摄像头采集车辆周围工况信息,解码器703将摄像头同轴电缆输出视频数据转换为mipi高速数字信号接口并传输到处理器704,超声波雷达连接器702外接超声波雷达传感器采集车辆距离障碍物的距离信息,电压比较器705将超声波雷达传感器输出的脉动高压频率信号转换成平稳的低压频率信号并传输到处理器704,处理器704完成各类数据处理、协议解析和算法实现等功能,处理器704计算自动泊车轨迹并通过板对板连接器600发送横向及纵向运动控制指令到动力总成域控制器主板500的微控制单元501。
58.微控制单元501还通过板对板连接器600输出上下电时序控制指令和工作模式控制指令到全景环视域控制器主板700,以实现全景环视域控制器主板700的上下电时序和工作模式的控制。这减少全景环视域控制器主板700用来控制上下电时序和工作模式的微控制单元,降低了成本,同时方便管理。
59.具体地,全景环视域控制器主板700的公头602引出处理器704的双向二线制同步串行信号(iic信号)和串行外围信号(spi信号),动力总成域控制器主板500的母头601引出微控制单元501的双向二线制同步串行信号(iic信号)、串行外围信号(spi信号)和使能信号(en信号),以使全景环视域控制器主板700的处理器704通过板对板连接器600输出运动
控制指令到动力总成域控制器主板500的微控制单元501,还使得动力总成域控制器主板500的微控制单元501通过板对板连接器600输出上下电时序控制指令和工作模式控制指令到全景环视域控制器主板700。
60.除接收运动控制指令以及输出上下电时序控制指令和工作模式控制指令外,微控制单元501还实现动力总成域控制器主板500的数据处理与控制。
61.如图4所示,动力总成域控制器主板500还包括电源模块502,动力总成域控制器主板500通过板对板连接器600将电源模块502的电能输出到全景环视域控制器主板700。这减少全景环视域控制器主板700上的电源模块以及电源连接器的设置,方便管理。
62.除给全景环视域控制器主板700提供电能外,电源模块502还为动力总成域控制器主板500提供电能。具体地,如图4所示,动力总成域控制器主板500还包括电源管理集成电路模块503(pmic)和主连接器504,主连接器504外接电源线缆实现动力总成域控制器主板500的供电,电源模块502将外接的车载电源电压转换为稳定的12v直流电压,电源管理集成电路模块503将该12v直流电压转换为动力总成域控制器主板500上相关器件所需的电压。
63.如图4所示,动力总成域控制器主板500还包括高边驱动器505、低边驱动器506、控制器局域网络收发器(can收发器)507、局域网收发器(lan收发器)508、局域互联网络收发器(lin收发器)509以及实时时钟(rtc时钟)510。控制器局域网络收发器507实现控制器局域网络(can)数据链路层与物理层之间的数据转换。局域网收发器508实现局域网(lan)数据链路层与物理层之间的数据转换。局域互联网络收发器509实现局域互联网络(lin)数据链路层与物理层之间的数据转换。高边驱动器505和低边驱动器506实现电池水泵、ptc供电继电器、暖风泵、风扇供电继电器、制动真空泵继电器以及压缩机供电继电器的控制。实时时钟510实现准确计时。
64.主连接器504还外接控制器局域网络线缆(can线缆)、局域网线缆(lan线缆)以及高低边驱动线缆实现车辆通信与控制。
65.如图5所示,全景环视域控制器主板700还包括电源管理集成电路模块706(pmic)、内存707以及存储器708。电源管理集成电路模块706将电压转换为全景环视域控制器主板700上各相关器件所需的电压。内存707实现指令和数据的高速缓存以提高系统的运行效率。存储器708用于存储操作系统、算法、命令。
66.如图3所示,机箱800容纳动力总成域控制器主板500、板对板连接器600以及全景环视域控制器主板700。具体地,机箱800包括箱体801和盖板802,盖板802盖合箱体801的开口以形成长方体容纳空间,用于容纳动力总成域控制器主板500、板对板连接器600以及全景环视域控制器主板700。设置机箱800容纳动力总成域控制器主板500和全景环视域控制器主板700,无需单独为全景环视域控制器主板700配置机箱,减少机箱的数量,方便管理。
67.在本实施例中,扩展域控制器主板以全景环视域控制器主板700为例进行说明。在另一个或多个实施例中,扩展域控制器主板为其他扩展域控制器主板。
68.实施例四
69.一种车辆,该车辆包括实施例三中所述的控制系统,避免了动力总成域控制器和扩展域控制器间复杂的线束连接,还减少了扩展域控制器主板用来控制上下电时序和工作模式的微控制单元,减少了扩展域控制器主板上的电源模块以及电源连接器的设置,减少了单独为扩展域控制器主板配置的机箱,降低了成本,同时方便管理。
70.本发明虽然以实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以做出可能的变动和修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1