一种自适应神经网络动态面控制方法
1.本发明涉及非线性控制技术领域,尤其涉及一种具有未知控制方向和未知执行器故障不确定非线性严反馈系统的跟踪控制方法。
背景技术:
2.实际中的很多系统,如质量-弹簧阻尼系统、机械系统、飞行控制系统等,在建立数学模型时通常需要考虑非线性特性、不确定动态特性和严反馈动态特性,进而导致系统模型存在不确定非线性严反馈形式。然而,由于不确定函数的引入,可能引起系统控制方向未知,当系统控制方向未知时,势必会使得控制器的设计变得复杂;此外,由于系统的正常运行,少不了执行器正常发挥作用,但是随着系统长时间、高负荷的运作,执行器可能出现未知故障,一旦执行器出现故障,很可能影响系统的控制效果,严重时甚至导致系统无法正常运行。因此,在不确定非线性严反馈系统的研究中,设计出合适的控制律,以应对未知控制方向和未知执行器故障的存在,实现系统期望的跟踪控制,是很有必要的。
3.在解决不确定非线性系统中,常用的方法是反步控制方法,该方法将所研究的复杂系统分解为不超过系统阶数的子系统,然后对每个子系统设计相应的虚拟控制律和相关参数的估计控制律,直到最后一步得到需要设计的控制律,反步控制方法的应用,有效降低了不确定非线性系统控制律设计难度。然而,在使用反步控制方法时,需要对系统中的非线性函数求取导数,进而引起求导后的函数项数大增,这种现象对于高阶系统来说,更为突出,而动态面控制方法的提出能有效避免此类现象的发生。动态面控制方法能够很好地解决不确定非线性系统的自适应控制问题,通过引入的一阶低通滤波器,避免了对系统中非线性函数的求导。需要指出的是,实际系统通常含有复杂且未知的非线性动态,这很大程度上限制了动态面控制方法的使用。
技术实现要素:
4.本发明所要解决的技术问题是实现一种引入神经网络控制方法,对系统中的未知非线性函数进行逼近,设计参数估计控制律,进而结合动态面控制技术和自适应控制方法,用于解决未知控制方向和未知执行器故障下不确定非线性严反馈系统的跟踪控制问题,并有效提升系统跟踪控制精度。
5.为了实现上述目的,本发明采用的技术方案为:一种自适应神经网络动态面控制方法,包括以下步骤:
6.步骤1、建立具有未知控制方向和未知执行器故障的不确定非线性严反馈系统动力学模型;
7.步骤2、针对未知控制方向和未知执行器故障下不确定非线性严反馈系统,结合神经网络控制方法和动态面控制技术,当i=1时,设计对应的跟踪误差和虚拟控制律;
8.步骤3、针对未知控制方向和未知执行器故障下不确定非线性严反馈系统,结合神经网络控制方法和动态面控制技术,当i=2,
…
,n-1时,设计对应的跟踪误差和虚拟控制
律;
9.步骤4、针对未知控制方向和未知执行器故障下不确定非线性严反馈系统,结合神经网络控制方法和动态面控制技术,当i=n时,设计对应的跟踪误差和控制律;
10.步骤5、结合设计的参数估计控制律和控制律,设计李雅普诺夫函数,该李雅普诺夫函数能够解决所建立的具有未知控制方向和未知执行器故障的不确定非线性严反馈系统动力学模型的自适应跟踪控制问题。
11.所述步骤1包括以下步骤:
12.1)具有未知控制方向和未知执行器故障的不确定非线性严反馈系统模型表达式为:
[0013][0014]
其中,x1(t),
…
,xn(t)和uf(t)分别表示系统的状态和实际控制输入,和表示未知非线性光滑函数,和表示不确定非线性动态,ai表示未知但有界的正常数,表示第i个状态xi的导数,表示第n个状态xn的导数,n为系统的阶数;
[0015]
2)设系统受到未知执行器故障,故障由失效和偏差信号组成,表达式为:
[0016]
uf(t)=ρu(t)+b0(t)
ꢀꢀꢀ
式2
[0017]
其中,ρ表示未知正常数并满足这里ρm和是未知的正常数,u(t)是需要设计的执行器输入,b0(t)表示执行器受到的偏差信号且出现在t0之后,而且对于满足
[0018]
3)设定系统中的未知参数ai、未知非线性光滑函数和不确定非线性动态均有界,表达式为:
[0019][0020][0021][0022]
其中,a
im
、和分别表示未知的正常数;
[0023]
4)选取nussbaum增益函数n(κ),对于定义于区间[0,tf)上的光滑函数v(t)和κ(t),且v(t)≥0,如果nussbaum增益函数n(κ)使得如下不等式成立:
[0024][0025]
则有v(t)、κ(t)和在区间[0,tf)上有界,其中,函数满足g
*
和是正常数,c0和k0是待设计的正常数,n(κ)表示选取的nussbaum增益函数,表示光滑函数κ(τ)的导数。
[0026]
所述步骤2包括以下步骤:
[0027]
1)定义跟踪误差函数z1,其表达式为:
[0028]
z1=x
1-ydꢀꢀꢀ
式7
[0029]
其中,x1表示系统的第1个状态,yd表示设定的跟踪信号;
[0030]
结合式1和式7,得到z1的导数为:
[0031][0032]
其中,a1系统的未知参数,x2表示系统的第2个状态,表示不确定非线性动态;
[0033]
通过rbf神经网络对未知的f1(x1)/a1逼近,则有:
[0034][0035]
其中,w
*
表示理想的权值向量,表示未知的正常数,ξ1(x1)表示引入的高斯函数,ε1(x1)表示逼近误差,(
·
)
t
表示进行转置运算;
[0036]
定义如下表达式:
[0037][0038]
其中,w
1t
和分别表示为:
[0039][0040][0041]
将式9和式10代入到式8,得到:
[0042][0043]
其中,表示系统的不确定动态,表示不确定动态的最大值,tanh(
·
)表示双曲正确函数;
[0044]
2)设计虚拟控制律φ
2d
和参数估计控制律表达式分别为:
[0045][0046][0047]
其中,表示w1的估计,tanh(
·
)表示引入的双曲正切函数,θ、c1和γ1是待设计的正常数,∏1是待设计的正常值矩阵,表示第1个rbf神经网络的初始权值向量;
[0048]
引入时间常数为τ2的一阶滤波器对φ
2d
进行滤波处理,则有:
[0049][0050]
其中,y
2d
表示一阶滤波器的输出,φ
2d
(0)表示虚拟控制律的初始值,y
2d
(0)表示低通滤波器的初始值;
[0051]
3)定义滤波误差χ2,其表达式为:
[0052]
χ2=y
2d-φ
2d
ꢀꢀꢀ
式17
[0053]
对式17求导,则有:
[0054][0055]
其中,δ2(
·
)是引入的非负连续有界函数,且有
[0056]
所述步骤3包括以下步骤:
[0057]
1)定义跟踪误差zi,器表达式为:
[0058]
zi=x
i-y
id
ꢀꢀꢀ
式19
[0059]
其中,xi表示系统的第i个状态,y
id
表示低通滤波器的输出;
[0060]
结合式1和式19,得到zi的导数为:
[0061][0062]
其中,ai系统的未知参数,x
i+1
表示系统的第i+1个状态,表示不确定非线性动态,表示低通滤波器输出y
id
的导数;
[0063]
通过引入第ith个rbf神经网络对未知的逼近,则有:
[0064][0065]
其中,w
i*
表示理想的权值向量,这里表示未知的正常数,表示引入的高斯函数,表示逼近误差;
[0066]
定义如下表达式:
[0067][0068]
其中,w
it
和分别表示为:
[0069][0070][0071]
将式21和式22同时代入到式20,得到:
[0072]
[0073]
其中,表示系统的不确定动态,表示不确定动态的最大值,tanh(
·
)表示双曲正确函数;
[0074]
2)设计虚拟控制律φ
(i+1)d
和参数估计控制律表达式分别为:
[0075][0076][0077]
其中,表示wi的估计,ci和γi是待设计的正常数,пi是待设计的正常值矩阵,表示第ith个rbf神经网络的初始权值向量;
[0078]
引入时间常数为τ
i+1
的一阶滤波器对φ
(i+1)d
进行滤波处理,则有:
[0079][0080]
其中,y
(i+1)d
表示一阶滤波器的输出,φ
(i+1)d
(0)表示虚拟控制律的初始值,y
(i+1)d
(0)表示低通滤波器的初始值;
[0081]
3)定义滤波误差χ
i+1
,其表达式为:
[0082]
χ
i+1
=y
(i+1)d-φ
(i+1)d
ꢀꢀꢀ
式29
[0083]
考虑到和公式(26),对式29求导,则有:
[0084][0085]
其中,δ
i+1
(
·
)是引入的非负连续有界函数,且存在
[0086]
所述步骤4包括以下步骤:
[0087]
1)定义跟踪误差zn,器表达式为:
[0088]zn
=x
n-y
nd
ꢀꢀꢀ
式31
[0089]
其中,xn表示系统的第i个状态,y
nd
表示低通滤波器的输出;
[0090]
结合式1、式2和式31,得到zn的导数为:
[0091][0092]
其中,表示系统的不确定动态;
[0093]
引入第nth个rbf神经网络对未知的逼近,则有:
[0094][0095]
其中,表示理想的权值向量,表示未知的正常数,表示引入的高斯函数,表示逼近误差;
[0096]
定义如下表达式:
[0097][0098]
其中,w
it
和分别表示为:
[0099][0100][0101]
将式33和式34同时代入到式32,得到:
[0102][0103]
其中,表示系统的不确定动态,表示不确定动态的最大值,tanh(
·
)表示双曲正确函数;
[0104]
2)设计控制律u(t),中间控制律α(t),参数更新律和参数估计控制律表达式分别为:
[0105]
u(t)=n(κ)α(t)
ꢀꢀꢀ
式38
[0106][0107][0108][0109]
其中,表示wn的估计,β、cn和γn是待设计的正常数,пn是待设计的正常值矩阵,表示第nth个rbf神经网络的初始权值向量。
[0110]
所述步骤5包括以下步骤:
[0111]
1)当1≤i≤n-1时,设计如下李雅普诺夫函数,即有:
[0112][0113]
其中,且有
[0114]
考虑到x
i+1
=z
i+1
+φ
(i+1)d
+χ
i+1
,对式42求导,并代入式26和式27,得到:
[0115][0116]
由于存在不等式:
[0117][0118]
[0119][0120][0121][0122][0123]
则式43可转化为:
[0124][0125]
其中,表示的最大特征值;
[0126]
2)当i=n时,设计如下李雅普诺夫函数,即有:
[0127][0128]
对公式(45)求导,并代入公式(37)和公式(41),得到:
[0129][0130]
由于存在不等式:
[0131][0132][0133]
对式46的右边同时加减znα(t),并代入式39、式40和式41,则有:
[0134][0135]
3)设计李雅普诺夫函数v,即有:
[0136][0137]
其中,an=1;
[0138]
对式48求导,并代入式44和式47,得到:
[0139][0140]
其中,
[0141]
取常数ω,使得以下不等式成立,即有:
[0142][0143][0144][0145][0146][0147]
且令:
[0148][0149]
于是,式49可转化为:
[0150][0151]
对式50的两边同时乘以e
2ωt
,并在区间[0,t)上取积分,并对积分后的结果同时乘以e-2ωt
,则有:
[0152][0153]
并且有:
[0154][0155]
根据式6,则有:
[0156][0157]
其中,
[0158]
考虑到式7、式42、式45和式53,则有:
[0159][0160]
其中,ω的取值为:
[0161][0162]
当对参数ci、γi、τi、∏i和θ进行调整使c0/ω任意小,确保了跟踪误差e1=x
1-yd能够收敛于零的很小邻域内,实现未知控制方向和未知执行器故障下不确定非线性严反馈系统的自适应跟踪控制。
[0163]
本发明对未知控制方向和未知执行器故障的存在,结合了神经网络控制方法、动态面控制技术以及自适应控制方法,设计了自适应神经网络动态面控制律,解决了未知控制方向和未知执行器故障下不确定非线性严反馈系统的自适应跟踪控制问题。
[0164]
未知控制方向和未知执行器故障下不确定非线性严反馈系统的自适应跟踪控制问题,结合神经网络控制方法、动态面控制技术以及自适应控制方法,设计了一种自适应神经网络动态面方法。基于神经网络控制方法,实现了系统中未知非线性动态的逼近处理;基于动态面控制技术,通过一阶低通滤波器的使用,避免了对系统中非线性函数的求导;基于自适应控制方法,实现了系统中未知参数的估计,得到了参数更新控制律。本发明专利提供了一种解决未知控制方向和未知执行器故障不确定非线性严反馈系统跟踪控制问题的方法,通过设计的自适应神经网络动态面控制策略,实现了不确定非线性严反馈系统的自适应跟踪控制。
[0165]
一种基于神经网络动态面控制的未知控制方向和未知执行器故障不确定非线性严反馈系统自适应跟踪控制方法,将神经网络控制方法、动态面控制技术和自适应控制方法进行结合,既能对系统中未知非线性动态进行逼近,又能免除对系统中非线性函数进行求导,以此消除求导后函数阶数增长问题,从而在未知控制方向和未知执行器故障存在下,解决不确定非线性严反馈系统的自适应跟踪控制问题。
附图说明
[0166]
下面对本发明说明书中每幅附图表达的内容作简要说明:
[0167]
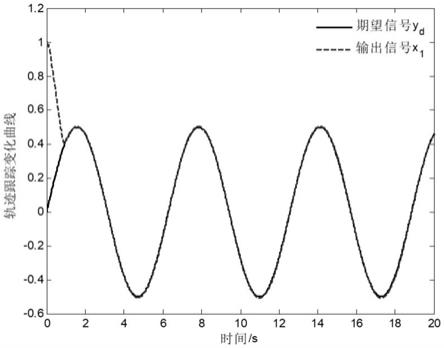
图1为本发明提供的系统输出x1跟踪参考信号yd的变化曲线;
[0168]
图2为本发明提供的系统跟踪误差e1的变化曲线;
[0169]
图3为本发明提供的未知非线性函数f1/a1和f2及其估计的变化曲线;
[0170]
图4为本发明提供的设计的控制律u(t)的变化曲线;
[0171]
图5为本发明提供的系统控制流程示意图。
具体实施方式
[0172]
下面对照附图,通过对实施例的描述,本发明的具体实施方式如所涉及的各构件的形状、构造、各部分之间的相互位置及连接关系、各部分的作用及工作原理、制造工艺及
操作使用方法等,作进一步详细的说明,以帮助本领域技术人员对本发明的发明构思、技术方案有更完整、准确和深入的理解。
[0173]
本发明是一种解决不确定非线性严反馈系统跟踪控制问题的自适应神经网络动态面控制方法,包括以下步骤:
[0174]
步骤1,建立具有未知控制方向和未知执行器故障的不确定非线性严反馈系统动力学模型,过程如下:
[0175]
1.1具有未知控制方向和未知执行器故障的不确定非线性严反馈系统模型表达式为:
[0176][0177]
其中,x1(t),
…
,xn(t)和uf(t)分别表示系统的状态和实际控制输入,和表示未知非线性光滑函数,和表示不确定非线性动态,ai表示未知但有界的正常数,表示第i个状态xi的导数,表示第n个状态xn的导数,n为系统的阶数;
[0178]
1.2设系统受到未知执行器故障,故障由失效和偏差信号组成,表达式为:
[0179]
uf(t)=ρu(t)+b0(t)
ꢀꢀꢀ
(2)
[0180]
其中,ρ表示未知正常数并满足这里ρm和是未知的正常数,u(t)是需要设计的执行器输入,b0(t)表示执行器受到的偏差信号且出现在t0之后,而且对于满足
[0181]
1.3设定系统中的未知参数ai、未知非线性光滑函数和不确定非线性动态均有界,表达式为:
[0182][0183][0184][0185]
其中,a
im
、和分别表示未知的正常数;
[0186]
1.4选取nussbaum增益函数n(κ),对于定义于区间[0,tf)上的光滑函数v(t)和κ(t),且v(t)≥0,如果nussbaum增益函数n(κ)使得如下不等式成立:
[0187][0188]
则有v(t)、κ(t)和在区间[0,tf)上有界,其中,函数满足g
*
和是正常数,c0和k0是待设计的正常数,n(κ)表示选取的nussbaum增益函数,表示光滑函数κ(τ)的导数。
[0189]
步骤2,针对未知控制方向和未知执行器故障下不确定非线性严反馈系统,结合神
经网络控制方法和动态面控制技术,当i=1时,设计对应的跟踪误差和虚拟控制律,设计过程如下:
[0190]
2.1定义跟踪误差函数z1,其表达式为:
[0191]
z1=x
1-ydꢀꢀꢀ
(7)
[0192]
其中,x1表示系统的第1个状态,yd表示设定的跟踪信号;
[0193]
结合公式(1)和公式(7),得到z1的导数为:
[0194][0195]
通过rbf神经网络对未知的f1(x1)/a1逼近,则有:
[0196][0197]
其中,w
*
表示理想的权值向量,表示未知的正常数,ξ1(x1)表示引入的高斯函数,ε1(x1)表示逼近误差,(
·
)
t
表示进行转置运算;
[0198]
定义如下表达式:
[0199][0200]
其中,和分别表示为:
[0201][0202][0203]
将公式(9)和公式(10)代入到公式(8),得到:
[0204][0205]
其中,表示系统的不确定动态,表示不确定动态的最大值,tanh(
·
)表示双曲正确函数;
[0206]
2.2设计虚拟控制律φ
2d
和参数估计控制律表达式分别为:
[0207][0208][0209]
其中,表示w1的估计,tanh(
·
)表示引入的双曲正切函数,θ、c1和γ1是待设计的正常数,∏1是待设计的正常值矩阵,表示第1个rbf神经网络的初始权值向量;
[0210]
引入时间常数为τ2的一阶滤波器对φ
2d
进行滤波处理,则有:
[0211][0212]
其中,y
2d
表示一阶滤波器的输出,φ
2d
(0)表示虚拟控制律的初始值,y
2d
(0)表示低通滤波器的初始值;
[0213]
2.3定义滤波误差χ2,其表达式为:
[0214]
χ2=y
2d-φ
2d
ꢀꢀꢀ
(17)
[0215]
考虑到和公式(14),对公式(17)求导,则有:
[0216][0217]
其中,δ2(
·
)是引入的非负连续有界函数,且有
[0218]
步骤3,针对未知控制方向和未知执行器故障下不确定非线性严反馈系统,结合神经网络控制方法和动态面控制技术,当i=2,3,
…
,n-1时,设计对应的跟踪误差和虚拟控制律,设计过程如下:
[0219]
3.1定义跟踪误差zi,器表达式为:
[0220]
zi=x
i-y
id
ꢀꢀꢀ
(19)
[0221]
其中,xi表示系统的第i个状态,y
id
表示低通滤波器的输出;
[0222]
结合公式(1)和公式(19),得到zi的导数为:
[0223][0224]
通过引入第ith个rbf神经网络对未知的逼近,则有:
[0225][0226]
其中,w
i*
表示理想的权值向量,这里表示未知的正常数,表示引入的高斯函数,表示逼近误差;
[0227]
定义如下表达式:
[0228][0229]
其中,w
it
和分别表示为:
[0230][0231][0232]
将公式(21)和公式(22)同时代入到公式(20),得到:
[0233]
[0234]
3.2设计虚拟控制律φ
(i+1)d
和参数估计控制律表达式分别为:
[0235][0236][0237]
其中,表示wi的估计,ci和γi是待设计的正常数,пi是待设计的正常值矩阵,表示第ith个rbf神经网络的初始权值向量;
[0238]
引入时间常数为τ
i+1
的一阶滤波器对φ
(i+1)d
进行滤波处理,则有:
[0239][0240]
其中,y
(i+1)d
表示一阶滤波器的输出,φ
(i+1)d
(0)表示虚拟控制律的初始值,y
(i+1)d
(0)表示低通滤波器的初始值;
[0241]
3.3定义滤波误差χ
i+1
,其表达式为:
[0242]
χ
i+1
=y
(i+1)d-φ
(i+1)d
ꢀꢀꢀ
(29)
[0243]
考虑到和公式(26),对公式(29)求导,则有:
[0244][0245]
其中,δ
i+1
(
·
)是引入的非负连续有界函数,且存在
[0246]
步骤4,针对未知控制方向和未知执行器故障下不确定非线性严反馈系统,结合神经网络控制方法和动态面控制技术,当i=n时,设计对应的跟踪误差和控制律,设计过程如下:
[0247]
4.1定义跟踪误差zn,器表达式为:
[0248]zn
=x
n-y
nd
ꢀꢀꢀ
(31)
[0249]
其中,xn表示系统的第i个状态,y
nd
表示低通滤波器的输出;
[0250]
结合公式(1)、公式(2)和公式(31),得到zn的导数为:
[0251][0252]
其中,表示系统的不确定动态;
[0253]
引入第nth个rbf神经网络对未知的逼近,则有:
[0254][0255]
其中,表示理想的权值向量,表示未知的正常数,表示引入的高斯函数,表示逼近误差;
[0256]
定义如下表达式:
[0257][0258]
其中,w
it
和分别表示为:
[0259][0260][0261]
将公式(33)和公式(34)同时代入到公式(32),得到:
[0262][0263]
其中,表示系统的不确定动态,表示不确定动态的最大值,tanh(
·
)表示双曲正确函数;
[0264]
4.2设计控制律u(t),中间控制律α(t),参数更新律和参数估计控制律表达式分别为:
[0265]
u(t)=n(κ)α(t)
ꢀꢀꢀ
(38)
[0266][0267][0268][0269]
其中,表示wn的估计,β、cn和γn是待设计的正常数,∏n是待设计的正常值矩阵,表示第nth个rbf神经网络的初始权值向量。
[0270]
步骤5,结合设计的参数估计控制律和控制律,设计李雅普诺夫函数,使得在未知控制方向和未知执行器故障下不确定非线性严反馈系统的自适应跟踪控制问题能够解决,设计过程如下:
[0271]
5.1当1≤i≤n-1时,设计如下李雅普诺夫函数,即有:
[0272][0273]
其中,,且有
[0274]
考虑到x
i+1
=z
i+1
+φ
(i+1)d
+χ
i+1
,对式42求导,并代入式26和式27,得到:
[0275][0276]
由于存在不等式:
[0277]
[0278][0279][0280][0281][0282][0283]
则公式(43)可转化为:
[0284][0285]
其中,表示的最大特征值;
[0286]
5.2当i=n时,设计如下李雅普诺夫函数,即有:
[0287][0288]
对公式(45)求导,并代入公式(37)和公式(41),得到:
[0289][0290]
由于存在不等式:
[0291][0292][0293]
对公式(46)的右边同时加减znα(t),并代入公式(39)、公式(40)和公式(41),则有:
[0294][0295]
5.3设计李雅普诺夫函数v,即有:
[0296]
[0297]
其中,an=1;
[0298]
对公式(48)求导,并代入公式(44)和公式(47),得到:
[0299][0300]
其中,
[0301]
取常数ω,使得以下不等式成立,即有:
[0302][0303][0304][0305][0306][0307]
且令:
[0308][0309]
于是,公式(49)可转化为:
[0310][0311]
对式50的两边同时乘以e
2ωt
,并在区间[0,t)上取积分,并对积分后的结果同时乘以e-2ωt
,则有:
[0312][0313]
并且有:
[0314][0315]
根据公式(6),则有:
[0316]
[0317]
其中,
[0318]
考虑到公式(7)、公式(42)、公式(45)和公式(53),则有:
[0319][0320]
其中,ω的取值为:
[0321][0322]
当对参数ci、γi、τi、∏i和θ进行调整使c0/ω任意小,确保了跟踪误差e1=x
1-yd能够收敛于零的很小邻域内,实现未知控制方向和未知执行器故障下不确定非线性严反馈系统的自适应跟踪控制。
[0323]
为了验证本发明的有效性,本发明给出了未知控制方向和未知执行器故障下不确定非线性严反馈系统自适应跟踪控制方法的仿真验证,如下:
[0324]
选择具有未知控制方向和未知执行器故障的不确定非线性严反馈系统,模型表达式为:
[0325][0326]
其中,a1=1,=1,执行器故障模型如公式(2)所示,这里取ρ=0.5+0.3sin(t),b0(t)=0.01sin(t)且发生于t≥5s之后。
[0327]
参考信号考虑为yd(t)=0.5sin(t),nussbaum增益函数选择为n(κ)=κ2cos(κ);对于未知非线性函数引入包含7个节点,1个输入的rbf神经网络对其进行估计,高斯基函数中心在区间[-6,6]内均匀选择,宽度设置为0.1;对于未知非线性函数引入包含9个节点,2个输入的rbf神经网络对其进行估计,高斯基函数中心在区间[-8,8]
×
[-8,8]内均匀选择,宽度设置为1.5。
[0328]
其他参数选择为:c1=2.0,c2=0.5,γ1=0.02,γ2=0.1,τ2=0.01,θ=0.01,β=2.0,∏1=diag{1.2},∏2=diag{12}以及仿真t=20s,系统的初始值为x1(0)=1.0和x2(0)=0.1,神经网络的初始权值矩阵为和控制律κ(t)的初始值κ(0)=0.0。
[0329]
图1和图2分别给出了系统输出x1跟踪参考信号yd的变化曲线,以及系统的跟踪误差e1的变化曲线,从图中可以看出,系统能够很好地跟踪参考信号,而且跟踪误差能收敛于零的很小邻域内。
[0330]
图3给出了未知非线性函数f1/a1和f2及其估计的变化曲线,图4展示的是设计的控
制律u(t)的变化曲线,图5是本发明提供的系统控制流程示意图。
[0331]
通过以上描述,本发明方法能够获得较好的跟踪控制性能,在未知控制方向和未知执行器故障下存在下,通过本发明方法,能够使不确定非线性严反馈系统取得很好的跟踪控制效果。
[0332]
上面结合附图对本发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种非实质性的改进,或未经改进将本发明的构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1