一种用于无人热气球的飞行高度控制系统的制作方法
1.本发明属于热气球控制技术领域,涉及一种用于无人热气球的飞行高度控制系统。
背景技术:
2.热气球是一种利用球囊内部密度低于环境空气的热空气来产生浮力的一种常见的飞行器。热气球球囊底部设有供冷空气加热用的开口和吊篮,开口正对燃烧器火焰喷射口,燃烧器架设于吊篮正上方,吊篮中负载存储有丙烷或液化气的高压燃气瓶。热气球相对其他飞行器不仅具有悬浮时长、状态稳定、经济性高等优点,还可以利用空气热膨胀特性通过自身携带的加热器加热球囊内空气来调节球囊内空气温度,从而达到控制气球升降的目的。
3.热气球本身无动力,只是随风而行,由于风在不同的高度具有不同的方向和速度,热气球驾驶员可以根据飞行需要的方向选择适当的高度。热气球一般最大下降速度6m/s,最大上升速度5m/s。热气球内一般配置的仪表有:高度计、升降速度表、温度表。温度计指示球囊内的空气温度。
4.热气球的飞行目前一般采用人工操纵飞行,飞行员在起飞前根据风向预报制定飞行轨迹,在热气球飞行过程中,地面工作人员驾车跟随热气球的飞行轨迹或者预先达到热气球的落地点进行接应。整个热气球的准备时间很短,一般在15min-20min之间。热气球的飞行依赖飞行员多年的飞行经验,有经验的飞行员可以根据空中不同高度风向不同来控制热气球的飞行路径。
5.一般的,热气球主要用于观光旅游或飞行表演,由热气球飞行员人工操纵热气球进行飞行,目前无人热气球很少看到,用于无人热气球的飞行控制系统基本没有公开文献介绍。
技术实现要素:
6.针对无人热气球提出一种飞行控制系统,在无人热气球上面加装气压传感器、温度传感器、gnss接收机、飞控计算机、数传电台等,对热气球的飞行环境进行感知,通过飞行控制计算机和地面控制站对无人热气球的飞行高度进行控制。
7.一种用于无人热气球的飞行高度控制系统,包括:飞控计算机、gnss接收机、数传电台、主驱动器;
8.所述gnss接收机设置在无人热气球吊舱内,用于接收热气球当前的经度、纬度、高度和速度数据,并将接收的数据传递至飞控计算机;所述数传电台设置在无人热气球吊舱内,飞控计算机通过数传电台与地面控制站通信;
9.所述主驱动器设置在吊舱内,包括:燃料罐、燃烧器、点火器;所述燃料罐用于存储并为燃烧器供给燃料;所述点火器用于点燃燃烧器,所述燃烧器用于加热热气球内空气;
10.飞控计算机接收地面控制站发送的高度指令并与无人热气球当前高度比较,根据
比较结果控制燃烧器燃烧时间,从而控制无人热气球飞行高度。
11.进一步,所述主驱动器还包括:第一电磁阀和第二电磁阀;所述第一电磁阀和第二电磁阀并联设置在燃料罐和燃烧器之间;
12.所述第一电磁阀为常火电磁阀,第二电磁阀为大火电磁阀,且第一电磁阀燃气流量小于第二电磁阀;
13.所述第一电磁阀用于维持燃烧器处于小火燃烧状态;所述第二电磁阀用于维持燃烧器处于大火燃烧状态以快速加热热气球内空气。
14.进一步,所述系统还包括:备驱动器;所述备驱动器与主驱动器相同且互为备份。
15.进一步,所述系统还包括:气压高度计;所述气压高度计设置在无人热气球上,用于采集无人热气球周围环境的气压并根据气压计算气压高度后发送至飞控计算机;
16.所述飞控计算机根据气压高度计测量的气压高度和gnss测量的高度计算融合高度,并将融合高度作为无人热气球当前高度。
17.进一步,所述系统还包括:环境温度传感器;
18.所述环境温度传感器设置在无人热气球上,用于测量周围环境温度并将环境温度数据传递至飞控计算机;飞控计算机根据周围环境温度对燃烧器燃烧时间进行修正。
19.进一步,所述环境温度传感器包括:顶部温度传感器和吊舱温度传感器;
20.所述顶部温度传感器设置在热气球顶部,吊舱温度传感器设置在吊舱外;飞控计算机根据顶部温度传感器和吊舱温度传感器的温度差值对燃烧器燃烧时间进行修正。
21.一种用于无人热气球的飞行高度控制方法,所述方法用于所述的系统,所述方法包括以下步骤:
22.步骤一:飞控计算机通过数传电台接收地面站的设定高度;
23.步骤二:飞控计算机将气压高度hp和gnss高度hg融合得到融合高度;
24.步骤三:飞控计算机将设定高度与融合高度比较后的高度差传递至高度控制回路控制器;
25.步骤四:高度控制回路控制器根据高度差进行高度pid控制生成升降速度制令,并将升降速度制令传递至升降速度控制回路控制器;
26.步骤五:飞控计算机对气压高度hp进行微分得到无人热气球当前升降速度传递至升降速度控制回路控制器;
27.步骤六:升降速度控制回路控制器根据升降速度制令和当前升降速度进行速度pid控制生成主驱动器控制量或副驱动器控制量;
28.步骤七:飞控计算机将主驱动器控制量或副驱动器控制量转换为脉冲输出信号,控制第二电磁阀开关,从而控制燃烧器大火燃烧时间。
29.进一步,所述步骤六中,飞控计算机还将顶部温度传感器和吊舱温度传感器测量得到的温度差值作为速度pid控制的前馈增益。
30.本发明具有以下效果:
31.本发明在无人热气球上增加飞行控制系统,地面控制站根据热气球上的传感器测量的环境信息对热气球的飞行环境进行感知、建模,建立风层数据,通过飞行控制系统对无人热气球的飞行高度进行控制。
附图说明
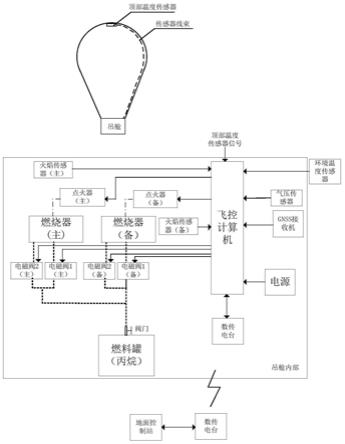
32.图1为飞行高度控制系统结构框图;
33.图2为飞行高度控制原理框图;
34.图3为燃烧器控制示意图。
具体实施方式
35.本发明为一种无人热气球飞行高度的控制系统,热气球上安装有气压传感器、温度传感器、gnss接收机、飞控计算机、数传电台等,热气球由于是无动力飞行,可以通过gnss接收机测量的地速来代表当前高度层的风速,热气球通过数传电台将高度、风速等信息发送到地面控制站,通过飞行控制计算机和地面控制站对无人热气球的飞行高度进行控制。
36.在热气球上安装有飞行控制系统,功能主要有两个:一是飞行控制,当无人热气球在飞行的过程中受到外界环境的干扰时,能够做出实时的反应,保持热气球的高度,同时能够从地面控制站接受指令改变热气球的飞行高度状态。二是飞行管理,能够进行导航计算和无线数据传输,在出现故障的情况下采取应急措施等。
37.温度传感器和气压传感器用于检测热气球周围的大气温度和压力。gnss接收机用于得到热气球的经度、纬度、高度、速度等信息。数传电台用于传输遥控遥测数据,地面控制站对热气球的数据进行建模、显示热气球的各项状态、轨迹规范及发送控制指令。
38.热气球的控制属于一个大时滞系统,当燃烧器加热时,首先对热气球内的空气进行加热,当热空气的温度大于90℃时,其密度持续下降后,热气球缓慢上升,一般的,热气球的高度变化反应时间大概在30s左右,由于热气球的内部温度和各个因素相关,例如:加热时间、燃料热值、囊体材料保温性能、风速、外界大气温度等,因此准确得到热气球的升力比较困难。
39.热气球的控制系统主要控制其飞行高度,由于gnss测量的高度误差在20m左右,并且该高度误差随机变化,对热气球的高精度高度控制不利,而气压高度在短时间精度很高,采用gnss/气压高度融合得到热气球的高度。飞控计算机接收传感器输入的飞行姿态和空中位置等状态信息,接收数传电台传输的由地面控制站上行信道送来的控制命令及数据,经处理和解算后,实现飞行模态的控制和任务的管理。整个飞控计算机的输入量即为传感器所采集的飞行姿态信息和定位信息,输出量主要为燃烧器电磁阀的控制。
40.热气球高度控制系统结构框图见图1所示。热气球下方悬挂吊舱,吊舱内布置燃料罐、飞控计算机、数传电台等。热气球顶部布置一个温度传感器。地面部分有地面控制站和数传电台。
41.燃料罐(丙烷)放置在热气球的吊篮里。整个燃烧器分为燃烧器(主)和燃烧器(备)两套系统,两套系统为余度备份,每套燃烧器都配置火焰传感器、电磁阀1、电磁阀2、点火器装置。
42.电磁阀1为常火电磁阀,其燃气流量较小,火焰也较小,主要功能为维持燃烧器处于小火燃烧状态;电磁阀2为大火电磁阀,燃气流量很大,火焰也较大,主要用于快速加热热气球内空气,使热气球上升。在飞行时,电磁阀1一般处于常开位置,燃烧器处于小火燃烧状态,当需要高度上升时,电磁阀2打开,燃烧器处于大火燃烧状态,当达到目标高度时,根据控制需要可关闭电磁阀2,此时燃烧器处于小火燃烧状态。
43.点火器用于点燃燃气,点火器采用直流升压电路,可将12v直流电压转换为15kv~20kv的高压点火脉冲,点火器可以根据地面指令进行点火,也可通过飞控计算机自动控制进行点火。
44.火焰传感器采用热电偶,布置在燃烧器旁,当燃烧器燃烧时,对热电偶进行加热,产生电势差,飞控计算机内的信号采集电路对该信号进行放大、滤波,根据设定的阈值判断是否处于燃烧状态,当检测到火焰熄灭后,可以通过指令进行重新点火。
45.温度传感器有2个,分别是顶部温度传感器和环境温度传感器,热气球的升力与热气球内外温度差有关,温差越大,热气球的升力越大,通过采集两者温度作为控制系统的前馈输入信号,增加系统控制精度。顶部温度传感器布置在热气球的顶部,通过内部走线到飞控计算机。环境温度传感器布置在吊舱外部,用于采集大气环境温度,气压传感器采集当前大气压,计算气压高度。数传电台用于无人热气球和地面控制站之间的通信。
46.地面控制站通过数传电台将高度指令发送给飞控计算机,飞控计算机接收到该指令后作为目标高度进行控制。
47.热气球高度控制原理框图见图2。该系统结构由两个回路构成,分别是外环高度控制回路和内环升降速度控制回路。外环高度控制回路的测量信号来自于gnss高度和气压高度的融合数据,两者使用互补滤波进行数据融合,见下式。式中hn表示融合后的高度,h
p
表示气压高度,hg表示gnss高度,τ取值0.7。
[0048][0049]
外环高度控制回路通过pid计算得到内环升降速度的给定值。内环升降速度回路实现热气球的升降速度控制,通过气压高度的微分得到当前热气球的升降速度,与高度回路得到的升降速度指令进行比较运算,同时考虑气球顶部温度与大气温度的前馈增益。上述输入量经过内环pid2控制器得到驱动器(主)的控制量,通过比列环节k2得到驱动器(备)的控制量。
[0050]
驱动器(主)的控制量cm为
[0051][0052]
其中:k
p1
、k
i1
、k
d1
分别是pid1的参数,参考取值分别是1.5、0.6、0.5;k
p2
、k
d2
、k
d2
分别是pid2的参数,参考取值分别是1.3、0.5、0.5;k1为大气温度和气球顶部环境温度的前馈系数,参考取值0.4;上述参数可以通过地面控制站进行在线调整。
[0053]
驱动器(备)的控制量cs为
[0054][0055]
其中:k2为驱动器(备)的比例系数,参考取值1.1。
[0056]
驱动器(主)和驱动器(备)的输出通过计算得到电磁阀的控制指令,电磁阀控制燃烧器的燃烧大小和燃烧时间,进而实现热气球的升降速度控制。飞控计算机根据驱动器(主)和驱动器(备)的输出转换为脉冲输出信号,控制燃烧器上的电磁阀2间断工作。当燃烧器(主)故障时,燃烧器(备)可以代替燃烧器(主)的功能,提高系统的可靠性。
[0057]
热气球的高度控制是一个大时滞系统,一般的延迟时间大概在10s左右。当燃烧停
止时间减少时,在同样的时间内有更多的燃烧时间,热气球获得更多的热量,会增加内外气体的温度差,热气球浮力增加;当燃烧停止时间增加时,在同样的时间内有较少的燃烧时间,热气球获得较少的热量,会减少内外气体的温度差,热气球浮力减小。燃烧停止时间会有一个上限和下限,下限需要保证热气球内部气体温度不至于太高导致囊体损坏。上限需要保证热气球内部气体具有一定温度,来维持热气球的外形。
[0058]
燃烧器的控制示意图见图3所示,其分为燃烧时间和停止时间,燃烧时间一般设置为2s,该时间固定,可以根据不同大小的热气球进行调整,停止时间根据pid控制器的控制量进行变化。燃烧器(主)的停止时间计算为
[0059]
t
sm
=5-0,2cm:
[0060]
燃烧器(备)的停止时间计算为:
[0061]
t
ss
=5-0.2cs;
[0062]
对得到的t
sm
和t
ss
值进行限幅在0.7s-13s之内。
[0063]
本发明涉及热气球控制技术领域,具体为一种用于无人热气球飞行高度控制系统的设计方法。该系统对热气球的飞行环境进行感知、建模,建立风层数据,通过飞行控制计算机和地面控制站对无人热气球的飞行高度进行控制。特征在于该系统成本低、可大规模部署、感知周围环境的特点。
[0064]
在地面控制站上发送常火电磁阀打开指令,然后发送点火指令,指令通过数传电台传输到飞控计算机,然后控制相应的电磁阀和点火装置点燃燃烧器。
[0065]
设定目标飞行高度,然后发送自动飞行模式,此时飞控计算机采集当前高度信息,进行控制律计算,产生控制信号,控制燃烧器的停止燃烧间隔时间,停止燃烧间隔时间限幅在0.7s-13s之内,燃烧时间固定为2s,通过改变停止燃烧间隔时间来改变热气球内部气体的温度,进而改变热气球的飞行高度。
[0066]
当燃烧器(主)故障时,燃烧器(备)可以代替燃烧器(主)的功能,提高系统的可靠性。
[0067]
在不同的飞行高度,飞控计算机将热气球的环境温度、风速、风向等数据通过数传电台下传到地面控制站,地面控制站对该数据进行记录并形成风层数据。
[0068]
当改变飞行高度时,通过地面控制站重新设定目标飞行高度,飞控计算机控制热气球上升或下降到新的飞行高度。
[0069]
在地面控制站上显示有热气球的飞行位置、高度等信息,当需要控制某个热气球的高度时,直接发送高度指令到该热气球,飞控计算机收到指令后,会控制燃烧器的加热和停止时间来改变热气球的高度。
[0070]
由于不同的高度层具有不同的风速,通过地面控制站构建的风场数据,来改变热气球的高度,利用不同高度的风速、风向,来使热气球达到一个区域驻留。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1