智能物流小车
1.本发明涉及智能物流配送领域,特别是涉及智能物流小车。
背景技术:
2.随着校园物质生活水平的提高,电子商务和外卖平台的兴起,越来越多的小型物流商品需要进行配送。小型商品物流配送速度的快慢直接影响着托运方的发展速度,随着用工成本的不断提高,托运成本居高不下;
3.目前小型商品物流常见的配送方式按配送的具体商品进行分类,主要可分为外卖配送方式和快递配送方式,存在着配送成本高,易受天气和交通的影响和不够方便的问题,满足不了人们对小型商品物流配送日益增长的高要求,为此我们提出智能物流小车。
技术实现要素:
4.为了克服现有技术的不足,本发明提供智能物流小车,本智能物流机器人经过测试,在特定的场地中很好的实现了物料的运输存放,抓取摆放精确度及机器人的定位精确度都较可靠,通过自主读码或远程发布指令可主执行任务,规避场内设定的障碍物,可以有效完成货物识别和搬运工作,减轻工人劳动强度,提高生产效率,降低企业的生产成本,对智能物流管理有一定的实际应用意义。
5.为解决上述技术问题,本发明提供如下技术方案:智能物流小车,所述智能物流小车包括
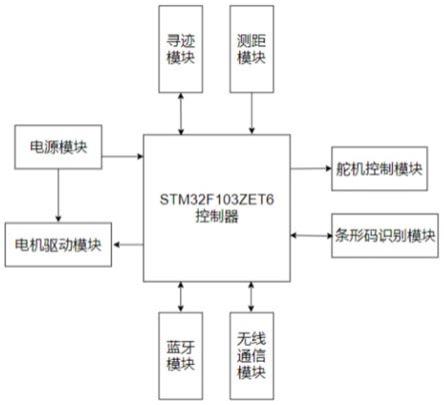
6.车体,所述车体由控制器、电源模块、电机驱动模块、舵机控制模块、条形码识别模块、寻迹模块、测距模块、蓝牙模块以及无线通信模块共同组成,所述车体设有lcd显示器,所述车体底端设有移动底盘,所述移动底盘底端设有麦克纳姆轮,且所述移动底盘顶端设有机械手,所述机械手上设有条形码识别模块,且所述车体前后端均设有寻迹模块。
7.优选的,所述车体设有避障模块,所述避障模块包括超声波避障单元和红外传感器避障单元,所述超声波避障单元和红外传感器避障单元均与控制器连接。
8.优选的,所述控制器采用stm32f103zet6单片机,且所述控制器自带pwm输出功能。
9.优选的,所述车体前后端均设有测距模块,所述测距模块为 us-100超声波测距模块,且所述车体左右两侧均设有ks103超声波传感器。
10.优选的,所述电机驱动模块由lv8731v多路步进电机驱动以及四个42步进电机组成。
11.优选的,所述寻迹模块由激光传感器和灰度传感器组成。
12.优选的,所述无线模块采用esp8266传感器,且所述无线模块采用udp通信协议。
13.优选的,所述条形码识别模块采用了mj-2060嵌入式扫描模组。
14.优选的,所述电源模块采用11.1v锂电池,所述锂电池通过 lm2596模块和ams1117-5模块将电压分别降到7v和5v
15.与现有技术相比,本发明能达到的有益效果是:
16.本智能物流机器人经过测试,在特定的场地中很好的实现了物料的运输存放,抓取摆放精确度及机器人的定位精确度都较可靠,通过自主读码或远程发布指令可主执行任务,规避场内设定的障碍物,可以有效完成货物识别和搬运工作,减轻工人劳动强度,提高生产效率,降低企业的生产成本,对智能物流管理有一定的实际应用意义。
附图说明
17.图1为本发明的系统设计方案结构示意图;
18.图2为本发明的智能物流小车侧视结构示意图;
19.图3为本发明的电路结构示意图;
具体实施方式
20.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施例,进一步阐述本发明,但下述实施例仅仅为本发明的优选实施例,并非全部。基于实施方式中的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得其它实施例,都属于本发明的保护范围。下述实施例中的实验方法,如无特殊说明,均为常规方法,下述实施例中所用的材料、试剂等,如无特殊说明,均可从商业途径得到。
21.实施例:
22.如图1-3所示,智能物流小车,智能物流小车包括车体,车体由控制器、电源模块、电机驱动模块、舵机控制模块、条形码识别模块、寻迹模块、测距模块、蓝牙模块以及无线通信模块共同组成,车体设有lcd显示器,车体底端设有移动底盘,移动底盘底端设有麦克纳姆轮,且移动底盘顶端设有机械手,机械手上设有条形码识别模块,且车体前后端均设有寻迹模块;车体设有避障模块,避障模块包括超声波避障单元和红外传感器避障单元,超声波避障单元和红外传感器避障单元均与控制器连接;
23.在其他实施例中,本实施例公开了,请如图1-3所示,控制器采用stm32f103zet6单片机,且控制器自带pwm输出功能;通过lcd显示器实时显示小车运动参数,使用控制器自带的pwm输出功能,步进调节占空比来调节电机的转速。
24.在其他实施例中,本实施例公开了,请如图1-3所示,车体前后端均设有测距模块,测距模块为us-100超声波测距模块,且车体左右两侧均设有ks103超声波传感器;采用电平触发方式测距,数据稳定准确,量程在2cm到450cm;且左右两侧装有ks103超声波传感器,通过i2c协议读取距离数据,量程在2cm到11m;四个测距模块可实现小车在场内的准确定位,并可实现场内自主避障。
25.在其他实施例中,本实施例公开了,请如图1-3所示,电机驱动模块由lv8731v多路步进电机驱动以及四个42步进电机组成; lv8731v是h桥驱动,具有低导通电阻,内置输出短路保护电路,可以很好的用于驱动步进电机。电机选择四个42步进电机,控制器通过定时器产生四路pwm,改变pwm频率即可实现转速的改变,通过i/o 口输出的电平控制电机转向,确保了物流小车的基本物流功能。
26.在其他实施例中,本实施例公开了,请如图1-3所示,寻迹模块由激光传感器和灰度传感器组成;通过检测黑线的方法,黑线返回高电平,白或黄色返回低电平,通过读取上升沿或下降沿的方式对机器人运动坐标进行实时更新,左右两侧安装的激光传感器对机器
人行进方向进行校正,确保车头方向与双线方向重合。
27.在其他实施例中,本实施例公开了,请如图1-3所示,无线模块采用esp8266传感器,且无线模块采用udp通信协议;该传感器与pc 机接入同一wifi可实现彼此间的通信,用户可通过pc机给物流小车发送任务指令码,同时物流小车的运动状态信息也可通过wifi数据传输的方式被传回至pc机串口,实现对物流小车运动状态的监视。
28.在其他实施例中,本实施例公开了,请如图1-3所示,条形码识别模块采用了mj-2060嵌入式扫描模组;条形码识别模块是物流车可以正确根据用户发送的指令,自动识别目标货物的关键所在,为了加快物流车运行的速度,要求该模块必须具备快速且准确的识别目标条形码信息。因此该小车的设计选用了mj-2060嵌入式扫描模组,且该模块的体积小巧、识别距离远,在完全不会对物流小车造型造成太大的影响外还可以加快识别的速度,提高物流车的整体效率。
29.在其他实施例中,本实施例公开了,请如图1-3所示,电源模块采用11.1v锂电池,锂电池通过lm2596模块和ams1117-5模块将电压分别降到7v和5v;根据设计的需要,通过lm2596模块和ams1117-5 模块将电压分别降到7v和5v,其中11.1v电压为直流电机供电,7v 电压为arduino板和舵机控制模块供电,5v为其他各模块供电。
30.智能物流小车的移动底盘由亚克力激光切割所得,悬挂式设计的车体结构可应对颠簸的地面状况,选用麦克纳姆轮可实现前行、横移、斜行、旋转及其组合等运动方式,满足设计需求,自制回转装置实现了机械手的360度旋转,回转底盘整体结构通过3d打印完成,机器人手爪通过solidworks仿真设计后,3d打印完成,三层结构可应对各种形状的物料,确保物流小车抓取货物的可靠性;
31.本智能物流小车基于stm32f103zet6作为主控制器控制最基本电机驱动模块,超声波模块通过测距进行有效地避障,寻迹模块能让小车在预定的路线上行进,工作时,能通过无线模块esp8266传感器以及蓝牙模块实现与pc端的实时通信,实时接收物流小车的方位,并能随时下达任务,即小车有自主智能物流的能力,同时,也能通过 pc端进行人为干预其物流路径,实现全智能半人工的物流功能,在到达目的地后,该智能物流小车可以自动识别目标货物,完成扫码后,控制器通过串口发送字符串指令控制各个舵机的转角实现机械手的动作,实现物料的精准抓取放置。
32.本智能物流机器人经过测试,在特定的场地中很好的实现了物料的运输存放,抓取摆放精确度及机器人的定位精确度都较可靠,通过自主读码或远程发布指令可主执行任务,规避场内设定的障碍物,可以有效完成货物识别和搬运工作,减轻工人劳动强度,提高生产效率,降低企业的生产成本,对智能物流管理有一定的实际应用意义。
33.上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于此,在所属技术领域的技术人员所具备的知识范围内,在不脱离本发明宗旨的前提下还可以作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1