一种新型恐龙模型控制系统的制作方法
1.本发明涉及控制系统领域,具体涉及一种新型恐龙模型控制系统。
背景技术:
2.通常的老式黑匣控制器由plc编程实现,包括plc,驱动器,数据接口等部件。其体积很大,一般只能做体外控制,这就造成操作不方便。程序固定,无法实现多个动作的复杂联合,用户做不到自定义运动。维修成本高昂,需要维护人员到现场维修。没有定位和工作情况信息的反馈,以及没有云端控制功能。
技术实现要素:
3.针对现有技术中的上述不足,本发明提供了一种新型恐龙模型控制系统。
4.为了达到上述发明目的,本发明采用的技术方案为:
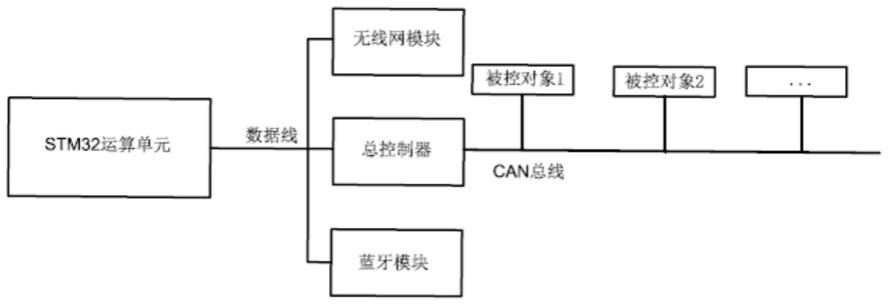
5.一种新型恐龙模型控制系统,包括运算单元、无线网单元、总控制器单元、蓝牙单元以及多个驱动单元,其中,所述运算单元用于根据用户的自定义数据实现对所述驱动单元的控制调整驱动单元的动作,其分别连接至所述无线网单元、总控制器单元和蓝牙单元;所述无线网单元和蓝牙单元用于提供总控制器单元与用户之间的通信交互;所述总控制单元用于根据所述运算单元的控制指令调整多个驱动单元的运行状态。
6.进一步的,所述多个驱动单元分别设置于所述恐龙模型的每个关节处,每个驱动单元均包括驱动器和推杆,其中,所述推杆连接驱动器,用于给推杆供电和采集推杆的运动信号,所述驱动器通过can数据总线连接总控制器,所述总控制器通过can数据总线传输数据对每一个驱动器的控制。
7.进一步的,所述蓝牙模块与所述运算模块采用串口通信连接,其中所述蓝牙模块采用主从一体蓝牙串口模块hc-05,其vcc端口接高电平,gnd端口接地,tx端口接处理模块的串口接收引脚,rx端口接串口输出引脚。
8.进一步的,所述蓝牙模块通过串口时钟以及gpio时钟将串口复位并配置gpio端口模式,其设置的串口参数包括波特率、字长、奇偶校验参数,用以控制串口的开启和终端。
9.进一步的,所述所述处理模块通过判定串口状态检测数据状态,当串口状态位被置位1时,检测状态为已接收,当串口状态被置位时,检测状态为已发送。
10.进一步的,所述以太网模块通过lwip协议获取时钟信号,并通过lwip协议与所述处理模块进行通信连接,当系统初始化成功后,通过dhcp获取ip状态并开启http服务,用以实现人机交互。
11.本发明具有以下有益效果:
12.整个控制器的体积缩小,可以容纳进恐龙身体里面。采用stm32可以实现更多的功能,可以连接更多的关节。因为有备用设备,其故障率很低。图形编程的方式,使得用户可以自定义功能。云端联网功能可以监视设备的运行状态,以及远程控制其工作情况
附图说明
13.图1为本发明新型的恐龙模型控制系统结构示意图。
具体实施方式
14.下面对本发明的具体实施方式进行描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
15.一种新型恐龙模型控制系统,如图1所示,包括运算单元、无线网单元、总控制器单元、蓝牙单元以及多个驱动单元,其中,所述运算单元用于根据用户的自定义数据实现对所述驱动单元的控制调整驱动单元的动作,其分别连接至所述无线网单元、总控制器单元和蓝牙单元;所述无线网单元和蓝牙单元用于提供总控制器单元与用户之间的通信交互;所述总控制单元用于根据所述运算单元的控制指令调整多个驱动单元的运行状态。
16.在本实施例里,cpu可以选择linux系统,rt-thread或者arm操作系统。以arm架构的stm32为例来说明整个工作流程。
17.stm32和蓝牙以串口方式通信。蓝牙hc-05是主从一体的蓝牙串口模块,当蓝牙设备配对连接成功后,可以忽视蓝牙内部的通信协议,直接将蓝牙当串口使用。两设备共同使用一通道,也就是同一个串口,其中一个设备发送数据到通道中,另一个设备可以接受通道中的数据。串口波特率可以从4800bps~1382400bps中选择,vcc接3.3或5v,gnd接gnd,tx接stm32串口接受引脚,rx接串口输出引脚。
18.具体而言,所述多个驱动单元分别设置于所述恐龙模型的每个关节处,每个驱动单元均包括驱动器和推杆,其中,所述推杆连接驱动器,用于给推杆供电和采集推杆的运动信号,所述驱动器通过can数据总线连接总控制器,所述总控制器通过can数据总线传输数据对每一个驱动器的控制。
19.具体而言,恐龙的每个关节由步进电机推杆连接而成,每个推杆连接一个驱动器,用于给推杆供电和采集推杆运动信号,所有的驱动器通过数据总线连接一个总控制器,总控制器通过can总线传输数据,实现对每一个驱动器的控制,从而实现不同的功能。
20.本实施例中,控制系统中设置有控制器的备用设备,当检测到当前运行设备故障时,会自动启用备用设备进行工作。备用设备接口直连数据总线,当设备故障时,cpu就能通过总线控制备用设备。
21.进一步的,所述蓝牙模块与所述运算模块采用串口通信连接,其中所述蓝牙模块采用主从一体蓝牙串口模块hc-05,其vcc端口接高电平,gnd端口接地,tx端口接处理模块的串口接收引脚,rx端口接串口输出引脚。
22.控制器连接了网络,同时也配备了蓝牙模块,用户可以使用网络或蓝牙实现对控制器的连接。用户在网络上,可以自行以模块化的方式进行编程,实现对恐龙的控制,同时在云端上,可以对设备进行在线调试,远程控制,工作情况分析,排除故障,检修,以及解决问题。
23.进一步的,所述蓝牙模块通过串口时钟以及gpio时钟将串口复位并配置gpio端口模式,其设置的串口参数包括波特率、字长、奇偶校验参数,用以控制串口的开启和终端。
24.具体而言,蓝牙模块的使能串口时钟以及gpio时钟,将串口复位,配置gpio端口模式,主要设置其为复用功能。设置串口参数,包括波特率,字长,奇偶校验等参数,使能串口,开启中断。最后发送串口数据,通过hc-05转为蓝牙信号。stm32库函数操作sart_dr寄存器读取串口接收到的数据的函数是:uint16_t sart_receivedata(usart_typedef*usartx);通过该函数可以读取串口接受到的数据
25.进一步的,所述所述处理模块通过判定串口状态检测数据状态,当串口状态位被置位1时,检测状态为已接收,当串口状态被置位时,检测状态为已发送。具体而言,发送和读取都要建立在判别串口状态的基础上这里介绍下串口状态rxne(读数据寄存器非空),当该位被置1的时候,就是提示已经有数据被接收到了,并且可以读出来了。tc(发送完成),当该位被置位的时候,表示usart_dr内的数据已经被发送完成了。
26.进一步的,所述以太网模块通过lwip协议获取时钟信号,并通过lwip协议与所述处理模块进行通信连接,当系统初始化成功后,通过dhcp获取ip状态并开启http服务,用以实现人机交互。
27.具体而言,stm32带有以太网模块,带有专用dma控制器,支持外部phy接口。采用lwip协议,是tcp/ip的一种实现方式,属于轻量级ip协议,适合在低端嵌入式系统中使用。
28.采用定时器来给lwio提供时钟,初始化lwip,包括处理以太网外设,外部phy,分配内存,使能dhcp,添加并打开网卡等操作。初始化成功后,进入dhcp获取ip状态,获取成功时,开启http服务,此时便可实现在浏览器输入stm32地址,登录web控制界面。通过可视化编程,用户可以在预览窗口提前预知恐龙动作,网站会根据用户的编程结果,生成json文件,json文件携带用户的控制信息,web通过网络或者蓝牙发送到stm32中。在stm32收到数据后,由于json是一个序列化数组,可以包含如字符串,数字等,对json进行解析,可以获得相应的控制动作以及控制参数,在对控制函数进行编程时,可以使用对应的字符串作为函数指针,这样的话,每次传递过来的json数据都包含了一个函数的调用情况以及相应的函数参数。控制函数比如左转动作的实现,是由stm32,can总线,推杆,电机驱动器,can驱动器等部件实现的。由stm32相应函数生成控制信号,经由gpio端口复用为can协议收发端口,经过收发器,广播到can总线上,带有特定id的can数据会被某一个收发器所接受并挂号到邮箱中,等待执行。如若执行出错,或设备故障,则将返回一个错误值,这个值会使cpu转换为提前准备好的冗余设备执行,并同时返回到用户端,也就是web界面,通知用户
29.本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
30.这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
31.这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计
算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
32.本发明中应用了具体实施例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
33.本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的原理,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。本领域的普通技术人员可以根据本发明公开的这些技术启示做出各种不脱离本发明实质的其它各种具体变形和组合,这些变形和组合仍然在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1