协同搬运方法、装置及可读存储介质和电子设备与流程
1.本发明涉及移动机器人控制技术领域,尤其涉及协同搬运方法、装置及可读存储介质和电子设备。
背景技术:
2.agv(automated guided vehicle,自动导引车)指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车。随着近几年agv技术的迅速发展,agv在物流、仓储、工厂生产等方面应用越来越普遍。目前移动机器人产品众多,根据不同的应用场景会设计不同载重能力的机器人,有载重几千克的物流分拣机器人,有载重吨级的仓储机器人。然而在某些应用场景中,可能大部分时间都是普通重量和尺寸的货物搬运任务,偶尔会有大重量大尺寸的货物搬运任务。目前大部分的做法是通过设计大型的机器人对大重量物体进行搬运。然而,由于大重量的货物出现的频率非常低,因此大型机器人的使用效率也非常低。
3.现实生活中,当需要搬运大型、沉重的物体时,往往需要多人以协作搬运的方式来完成。同样,采用机器人代替人类完成上述搬运任务时,当被运输的物体超过了单个机器人的承载能力时,考虑使用多机器人合作搬运将是完成任务的一种有效途径。各个机器人大部分时间是单独进行货物搬运,当有大型货物搬运任务时,多个机器人进行协作搬运。这将大大降低生产成本,提高生产效率。
4.目前,在部分特殊应用场合中,特别是大型器械(如动车、飞机等)的生产中也有少量的多机协同搬运的应用,但主要是通过简单的组合和同步控制完成基础的直线、原地旋转等运动。这需要较多的人工提前介入,比如:提前设计编队队形和固定运动轨迹,然后让agv严格按照设定的运动轨迹运动。这样agv的运动不够灵活,编队队形固定,并且较多地消耗技术人力资源。
技术实现要素:
5.本发明实施例提出协同搬运方法、装置及可读存储介质和电子设备,以提高协同搬运的灵活性和效率。
6.本发明实施例的技术方案是这样实现的:
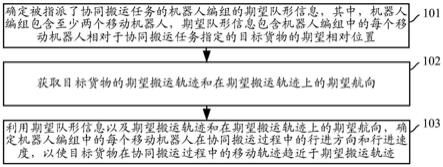
7.一种协同搬运方法,该方法包括:
8.确定被指派了协同搬运任务的机器人编组的期望队形信息,其中,所述机器人编组包含至少两个移动机器人,所述期望队形信息包含所述机器人编组中的每个移动机器人相对于所述协同搬运任务指定的目标货物的期望相对位置;
9.获取所述目标货物的期望搬运轨迹和在期望搬运轨迹上的期望航向;
10.利用所述期望队形信息以及所述期望搬运轨迹和所述在期望搬运轨迹上的期望航向,确定所述每个移动机器人在协同搬运过程中的行进方向和行进速度,以使所述目标货物在所述协同搬运过程中的移动轨迹趋近于所述期望搬运轨迹。
11.所述确定被指派了协同搬运任务的机器人编组的期望队形信息,包括:
12.获取所述目标货物在所述期望队形上的期望位置;
13.获取所述每个移动机器人在所述期望队形中的期望位置;
14.将所述每个移动机器人在所述期望队形中的期望位置相对于所述目标货物在所述期望队形上的期望位置的相对位置作为所述每个移动机器人相对于所述目标货物的期望相对位置。
15.所述利用所述期望队形信息以及所述期望搬运轨迹和所述在期望搬运轨迹上的期望航向,确定所述每个移动机器人在协同搬运过程中的行进方向和行进速度,包括:
16.在所述协同搬运过程中,利用所述期望搬运轨迹和所述目标货物的当前真实位置,获取所述目标货物的当前期望速度;
17.利用所述在期望搬运轨迹上的期望航向和所述目标货物的当前真实航向,获取所述目标货物的当前期望角速度;
18.利用所述机器人编组的期望队形信息和当前真实队形信息,获取所述机器人编组中的所述每个移动机器人在目标货物坐标系下的当前期望速度;
19.根据所述目标货物的当前期望速度、所述目标货物的当前期望角速度和所述每个移动机器人在目标货物坐标系下的当前期望速度,获取所述每个移动机器人的当前速度控制量和当前航向控制量。
20.所述利用所述期望搬运轨迹和所述目标货物的当前真实位置,获取所述目标货物的当前期望速度,包括:
21.根据所述目标货物的当前真实位置和所述期望搬运轨迹,确定所述目标货物的当前期望位置;
22.根据所述目标货物的所述当前期望位置和所述目标货物的当前真实位置,计算所述目标货物的当前期望速度。
23.当所述期望搬运轨迹为直线轨迹时,所述根据所述目标货物的当前真实位置和所述期望搬运轨迹,确定所述目标货物的当前期望位置,包括:
24.构造以所述目标货物的当前真实位置为圆心,以预设半径为半径的当前引导圆;且,
25.当所述当前引导圆与所述期望搬运轨迹不相交且所述期望搬运轨迹的终点在当前引导圆外时,连接所述当前引导圆的圆心与所述期望搬运轨迹的起点,若连接线与所述期望搬运轨迹的夹角大于90
°
,则将所述连接线与当前引导圆的交点作为所述目标货物的当前期望位置;若连接线与所述期望搬运轨迹的夹角不大于90
°
,则将所述当前引导圆的圆心到所述期望搬运轨迹上的垂直线与当前引导圆的交点作为所述目标货物的当前期望位置;和/或
26.当所述当前引导圆与所述期望搬运轨迹相交且所述期望搬运轨迹的终点在当前引导圆外时,选择距离所述期望搬运轨迹的终点近的交点作为所述目标货物的当前期望位置;和/或
27.当所述期望搬运轨迹的终点在当前引导圆内时,将所述期望搬运轨迹的终点作为所述目标货物的当前期望位置。
28.当所述期望搬运轨迹为圆弧轨迹时,所述根据所述目标货物的当前真实位置和所
述期望搬运轨迹,确定所述目标货物的当前期望位置,包括:
29.构造以所述目标货物的当前真实位置为圆心,以预设半径为半径的当前引导圆;
30.若所述当前引导圆与所述圆弧轨迹不相交且所述期望搬运轨迹的终点在当前引导圆外,连接所述圆弧轨迹的圆心与所述目标货物的当前真实位置,将该连接线的延长线与当前引导圆的交点作为所述目标货物的当前期望位置;和/或
31.若所述当前引导圆与所述圆弧轨迹相交且所述期望搬运轨迹的终点在当前引导圆外,连接所述目标货物的当前真实位置与所述圆弧轨迹的圆心,则该连接线的延长线在所述圆弧轨迹上的切线与所述当前引导圆相交,在相交的交点中选择距离所述圆弧轨迹的终点近的交点作为所述目标货物的当前期望位置;和/或
32.若所述期望搬运轨迹的终点在当前引导圆内,将所述期望搬运轨迹的终点作为所述目标货物的当前期望位置。
33.所述利用所述在期望搬运轨迹上的期望航向和所述目标货物的当前真实航向,获取所述目标货物的当前期望角速度,包括:
34.在所述期望搬运轨迹上查找与所述目标货物的当前真实位置最近的点,将所述最近的点的期望航向作为所述目标货物的当前期望航向;
35.根据所述目标货物的当前真实航向和所述当前期望航向,计算所述目标货物的当前期望角速度。
36.所述根据所述目标货物的当前期望速度、所述目标货物的当前期望角速度和所述每个移动机器人在目标货物坐标系下的当前期望速度,获取所述每个移动机器人的当前速度控制量和当前航向控制量,包括:
37.针对每个移动机器人,将该移动机器人在目标货物坐标系下的当前期望速度从目标货物坐标系下转换到全局坐标系下,得到第一速度矢量;
38.根据所述目标货物的当前期望速度获取第二速度矢量,根据所述目标货物的当前期望角速度获取第三速度矢量;
39.将第一速度矢量、第二速度矢量和第三速度矢量进行矢量相加,得到该移动机器人的当前期望速度矢量;
40.对该移动机器人的当前期望速度矢量进行矢量分解,其中,矢量的大小即为该移动机器人的当前期望速度,矢量的方向即为该移动机器人的当前期望航向;
41.根据该移动机器人的当前期望速度和当前真实速度,确定该移动机器人的当前速度控制量,根据该移动机器人的当前期望航向和当前真实航向,确定该移动机器人的当前航向控制量。
42.所述根据所述目标货物的当前期望速度获取第二速度矢量,包括:
43.将所述目标货物的当前期望速度作为该移动机器人所在位置处的第二速度矢量;
44.所述根据所述目标货物的当前期望角速度获取第三速度矢量,包括:
45.将所述目标货物的当前期望角速度与所述目标货物的当前真实位置到该移动机器人所在位置的距离进行矢量叉乘,得到第三速度矢量。
46.一种协同搬运装置,该装置包括:
47.预处理模块,用于确定被指派了协同搬运任务的机器人编组的期望队形信息,其中,所述机器人编组包含至少两个移动机器人,所述期望队形信息包含所述机器人编组中
的每个移动机器人相对于所述协同搬运任务指定的目标货物的期望相对位置;获取所述目标货物的期望搬运轨迹和在期望搬运轨迹上的期望航向;
48.协同控制模块,用于利用所述期望队形信息以及所述期望搬运轨迹和所述在期望搬运轨迹上的期望航向,确定所述每个移动机器人在协同搬运过程中的行进方向和行进速度,以使所述目标货物在所述协同搬运过程中的移动轨迹趋近于所述期望搬运轨迹。
49.一种非瞬时计算机可读存储介质,所述非瞬时计算机可读存储介质存储指令,所述指令在由处理器执行时使得所述处理器执行如上任一项所述的协同搬运方法的步骤。
50.一种电子设备,包括如上所述的非瞬时计算机可读存储介质、以及可访问所述非瞬时计算机可读存储介质的所述处理器。
51.一种协同搬运系统,该系统包括:控制器和多个移动机器人,所述多个移动机器人构成一个机器人编组,其中:
52.控制器,用于确定被指派了协同搬运任务的机器人编组的期望队形信息;获取所述目标货物的期望搬运轨迹和在期望搬运轨迹上的期望航向;利用所述期望队形信息以及所述期望搬运轨迹和所述在期望搬运轨迹上的期望航向,确定所述每个移动机器人在协同搬运过程中的行进方向和行进速度,将每个移动机器人在协同搬运过程中的行进方向和行进速度发送给对应移动机器人,以使所述目标货物在所述协同搬运过程中的移动轨迹趋近于所述期望搬运轨迹;其中,所述机器人编组包含至少两个移动机器人,所述期望队形信息包含所述机器人编组中的每个移动机器人相对于所述协同搬运任务指定的目标货物的期望相对位置;
53.移动机器人,用于按照控制器发来的本机器人在协同搬运过程中的行进方向和行进速度行进。
54.所述利用所述期望队形信息以及所述期望搬运轨迹和所述在期望搬运轨迹上的期望航向,确定所述每个移动机器人在协同搬运过程中的行进方向和行进速度,包括:
55.在所述协同搬运过程中,根据向各个移动机器人获取的各移动机器人当前所在的位置和当前航向,确定目标货物的当前真实位置和当前真实航向以及机器人编组的当前真实队形信息;
56.利用所述期望搬运轨迹和所述目标货物的当前真实位置,获取所述目标货物的当前期望速度;
57.利用所述在期望搬运轨迹上的期望航向和所述目标货物的当前真实航向,获取所述目标货物的当前期望角速度;
58.利用所述机器人编组的期望队形信息和当前真实队形信息,获取所述机器人编组中的所述每个移动机器人在目标货物坐标系下的当前期望速度;
59.根据所述目标货物的当前期望速度、所述目标货物的当前期望角速度和所述每个移动机器人在目标货物坐标系下的当前期望速度,获取所述每个移动机器人的当前速度控制量和当前航向控制量。
60.本发明实施例中,利用期望队形信息以及期望搬运轨迹和在期望搬运轨迹上的期望航向,确定机器人编组中的每个移动机器人在协同搬运过程中的行进方向和行进速度,从而使得在多移动机器人协同搬运目标货物的过程中,能够对目标货物的位置和姿态解耦控制,从而使得多个移动机器人能够以任意姿态沿着任意轨迹将目标货物协同搬运到任意
目标位置,提高了协同搬运的灵活性,且整个过程无需人工参与,提高了协同搬运效率。
附图说明
61.图1为本发明一实施例提供的协同搬运方法流程图;
62.图2-1为本发明实施例提供的当期望搬运轨迹为直线轨迹时,在目标货物的当前真实位置处于情况一时,确定目标货物的当前期望位置的示意图;
63.图2-2为本发明实施例提供的当期望搬运轨迹为直线轨迹时,在目标货物的当前真实位置处于情况二时,确定目标货物的当前期望位置的示意图;
64.图2-3为本发明实施例提供的当期望搬运轨迹为直线轨迹时,在目标货物的当前真实位置处于情况三时,确定目标货物的当前期望位置的示意图;
65.图2-4为本发明实施例提供的当期望搬运轨迹为直线轨迹时,在目标货物的当前真实位置处于情况四时,确定目标货物的当前期望位置的示意图;
66.图3为采用引导圆制导方法渐进跟踪直线轨迹的示意图;
67.图4-1为本发明实施例提供的当期望搬运轨迹为圆弧轨迹时,在目标货物的当前真实位置处于情况一时,确定目标货物的当前期望位置的示意图;
68.图4-2为本发明实施例提供的当期望搬运轨迹为圆弧轨迹时,在目标货物的当前真实位置处于情况二时,确定目标货物的当前期望位置的示意图;
69.图4-3为本发明实施例提供的当期望搬运轨迹为圆弧轨迹时,在目标货物的当前真实位置处于情况三时,确定目标货物的当前期望位置的示意图;;
70.图5为本发明实施例提供的采用基于基点法的运动学逆解运算获取移动机器人的当前期望速度和当前期望航向的过程示意图;
71.图6为本发明实施例提供的以两个移动机器人协同搬运目标货物为例,通过基于基点法的运动学逆解运算,将目标货物的当前期望速度和当前期望角速度转换成移动机器人的当前期望速度矢量的示意图;
72.图7为本发明另一实施例提供的协同搬运方法流程图;
73.图8为本发明实施例提供的协同搬运装置的结构示意图;
74.图9为本发明实施例提供的电子设备的结构示意图;
75.图10为本发明实施例提供的协同搬运系统的结构示意图。
具体实施方式
76.下面结合附图及具体实施例对本发明再作进一步详细的说明。
77.图1为本发明一实施例提供的协同搬运方法流程图,其具体步骤如下:
78.步骤101:确定被指派了协同搬运任务的机器人编组的期望队形信息,其中,机器人编组包含至少两个移动机器人,期望队形信息包含机器人编组中的每个移动机器人相对于协同搬运任务指定的目标货物的期望相对位置。
79.本实施例的执行主体为控制器,该控制器可以独立于机器人编组,或者也可位于机器人编组中的一个机器人上。
80.一可选实施例中,控制器可采用如下方式确定被指派了协同搬运任务的机器人编组的期望队形信息:
81.获取目标货物在期望队形上的期望位置;获取每个移动机器人在期望队形中的期望位置;将每个移动机器人在期望队形中的期望位置相对于目标货物在期望队形上的期望位置的相对位置作为每个移动机器人相对于目标货物的期望相对位置。其中,目标货物在期望队形上的期望位置可以目标货物的中心点表示。
82.例如:根据目标货物的形状、尺寸以及移动机器人的数量,确定移动机器人的最佳搬运队形,然后确定:当多个移动机器人处于最佳搬运队形时,目标货物在该最佳搬运队形上的最佳位置,此时,目标货物的中心点的位置o即为目标货物在期望队形上的期望位置,且,此时,各移动机器人的中心点的位置即为各移动机器人在期望队形中的期望位置,且,此时各移动机器人的中心点相对于o点的位置即为各移动机器人相对于目标货物的期望相对位置。其中,o点可作为目标货物坐标系的原点。
83.在实际应用中,机器人编组的期望队形信息一旦确定,在整个协同搬运过程中一般不再更改。
84.步骤102:获取目标货物的期望搬运轨迹和在期望搬运轨迹上的期望航向。
85.其中,目标货物的期望搬运轨迹和在期望搬运轨迹上的期望航向可由控制器根据目标货物的起点位置和终点位置计算得到。且,该计算过程在协同搬运正式开始前完成。且,目标货物的期望搬运轨迹和在期望搬运轨迹上的期望航向一旦确定,在整个协同搬运过程中一般不再更改。
86.步骤103:利用期望队形信息以及期望搬运轨迹和在期望搬运轨迹上的期望航向,确定机器人编组中的每个移动机器人在协同搬运过程中的行进方向和行进速度,以使目标货物在协同搬运过程中的移动轨迹趋近于期望搬运轨迹。
87.步骤103是按照预设时间间隔周期性进行的,当控制器在当前周期确定出每个移动机器人在协同搬运过程中的行进方向和行进速度,将行进方向和行进速度分别发送给对应的机器人,机器人根据接收到的行进方向和行进速度调整自己当前的行进方向和行进速度。
88.上述实施例中,利用期望队形信息以及期望搬运轨迹和在期望搬运轨迹上的期望航向,确定机器人编组中的每个移动机器人在协同搬运过程中的行进方向和行进速度,从而使得在多移动机器人协同搬运目标货物的过程中,能够对目标货物的位置和姿态解耦控制,从而使得多个移动机器人能够以任意姿态沿着任意轨迹将目标货物协同搬运到任意目标位置,提高了协同搬运的灵活性,且整个过程无需人工参与,提高了协同搬运效率。
89.一可选实施例中,步骤103中,利用期望队形信息以及期望搬运轨迹和在期望搬运轨迹上的期望航向,确定机器人编组中的每个移动机器人在协同搬运过程中的行进方向和行进速度,包括:
90.步骤1031:在协同搬运过程中,利用期望搬运轨迹和目标货物的当前真实位置,获取目标货物的当前期望速度;
91.具体地,先利用期望搬运轨迹确定目标货物的当前期望位置p
sp
,然后根据目标货物的当前真实位置p
re
和目标货物的当前期望位置p
sp
计算出p
re
和p
sp
之间的相对距离(该相对距离为矢量,方向为从p
re
指向p
sp
的方向),之后实际上就是根据计算控制量:目标货物的当前期望速度(的方向与保持一致)的过程。最常见的
控制算法就是pid(比例-积分-微分)控制算法,因此,可采用pid控制算法由计算得到在pid控制算法中,最简单的就是纯p(比例)反馈控制,例如:其中,k
p
为比例反馈系数。
92.其中,根据向各个移动机器人获取的各移动机器人当前所在的位置和当前航向,能够确定目标货物的当前真实位置和当前真实航向以及机器人编组的当前真实队形信息。
93.步骤1032:利用在期望搬运轨迹上的期望航向和目标货物的当前真实航向,获取目标货物的当前期望角速度;
94.具体地,先计算出当前真实航向相对于期望航向的相对航向,然后根据该相对航向采用pid控制算法计算出目标货物的当前期望角速度。
95.步骤1033:利用机器人编组的期望队形信息和当前真实队形信息,获取机器人编组中的每个移动机器人在目标货物坐标系下的当前期望速度;
96.这里,每个移动机器人在目标货物坐标系下的当前期望速度是具有方向的,即是一个矢量,该矢量的方向即,由机器人在当前真实队形中的当前真实位置指向机器人在期望队形中的期望位置的方向。
97.本步骤中,在计算每个移动机器人在目标货物坐标系下的当前期望速度时,与步骤1031中计算目标货物的当前期望速度采用的方法类同,即,对于每个机器人,先计算机器人在当前真实队形中的当前真实位置与机器人在期望队形中的期望位置之间的相对距离(该相对距离具有方向,为一个矢量),然后根据该相对距离采用pid控制算法,计算出该移动机器人在目标货物坐标系下的当前期望速度(该当前期望速度具有方向,为一个矢量)。
98.步骤1034:根据目标货物的当前期望速度、目标货物的当前期望角速度和每个移动机器人在目标货物坐标系下的当前期望速度,获取每个移动机器人的当前速度控制量和当前航向控制量。
99.上述实施例中,通过期望搬运轨迹和目标货物的当前真实位置,获取目标获取的当前期望速度,通过在期望搬运轨迹上的期望航向和目标货物的当前真实航向,获取目标货物的当前期望角速度,通过机器人编组的期望队形信息和当前真实队形信息,获取机器人编组中的每个移动机器人在目标货物坐标系下的当前期望速度,然后通过目标货物的当前期望速度、目标货物的当前期望角速度和每个移动机器人在目标货物坐标系下的当前期望速度,获取每个移动机器人的当前速度控制量和当前航向控制量,从而实现了对目标货物的位置和姿态解耦控制。
100.一可选实施例中,步骤1031中,利用期望搬运轨迹和目标货物的当前真实位置,获取目标货物的当前期望速度,包括:
101.根据目标货物的当前真实位置和期望搬运轨迹,确定目标货物的当前期望位置;根据目标货物的当前期望位置和目标货物的当前真实位置,计算目标货物的当前期望速度。
102.本发明实施例可采用引导圆制导方法确定目标货物的当前期望位置,具体地,分别以期望搬运轨迹为直线轨迹、圆弧轨迹时,进行举例说明如下:
103.一可选实施例中,当期望搬运轨迹为直线轨迹时,步骤1031中,根据目标货物的当前真实位置和期望搬运轨迹,确定目标货物的当前期望位置,包括:
104.构造以目标货物的当前真实位置为圆心,以预设半径r为半径的当前引导圆;且,
105.当当前引导圆与期望搬运轨迹不相交且期望搬运轨迹的终点在当前引导圆外时,连接当前引导圆的圆心与期望搬运轨迹的起点,若连接线与期望搬运轨迹的夹角大于90
°
,则将连接线与当前引导圆的交点作为目标货物的当前期望位置;若连接线与期望搬运轨迹的夹角不大于90
°
,则将当前引导圆的圆心到期望搬运轨迹上的垂直线与当前引导圆的交点作为目标货物的当前期望位置;和/或,
106.当当前引导圆与期望搬运轨迹相交且期望搬运轨迹的终点在当前引导圆外时,则在相交的两个交点中选择距离期望搬运轨迹的终点近的交点作为目标货物的当前期望位置;和/或,
107.当期望搬运轨迹的终点在当前引导圆内时,将期望搬运轨迹的终点作为目标货物的当前期望位置。
108.图2-1、2-2、2-3和2-4为当期望搬运轨迹为直线轨迹时,在目标货物的当前真实位置处于不同情况时,确定目标货物的当前期望位置的示意图,其中:
109.图2-1中,目标货物的当前真实位置(即当前引导圆的圆心)与期望搬运轨迹的起点之间的连接线与期望搬运轨迹的夹角大于90
°
,即此时处于搬运刚开始阶段,且,此时,当前引导圆与期望搬运轨迹不相交且期望搬运轨迹的终点在当前引导圆外,则,将目标货物的当前真实位置(即当前引导圆的圆心)与期望搬运轨迹的起点之间的连接线与当前引导圆的交点a作为目标货物的当前期望位置;
110.图2-2中,当前引导圆与期望搬运轨迹相交,且期望搬运轨迹的终点在当前引导圆外,且此时处于搬运中间阶段,则选择距离期望搬运轨迹的终点近的交点b作为目标货物的当前期望位置;
111.图2-3中,当前引导圆与期望搬运轨迹不相交且期望搬运轨迹的终点在当前引导圆外,且,目标货物的当前真实位置(即当前引导圆的圆心)与期望搬运轨迹的起点之间的连接线与期望搬运轨迹的夹角不大于90
°
,此时也处于搬运中间阶段,则将当前引导圆的圆心到期望搬运轨迹上的垂直线与当前引导圆的交点c作为目标货物的当前期望位置;
112.上述三种情况,期望搬运轨迹的终点都不位于当前引导圆内;
113.图2-4中,期望搬运轨迹的终点位于当前引导圆内,此时处于搬运即将结束阶段,直接将期望搬运轨迹的终点作为目标货物的当前期望位置。
114.上述方法的目标是为了引导目标获取沿着期望搬运轨迹移动,且目标货物的位置偏差始终不大于当前引导圆的半径r,且整个搬运过程中目标货物的期望位置是渐变的。其中,r的取值可设定为固定的值,也可根据目标货物的当前真实位置与当前期望位置之间的位置偏差进行调整,其中,当目标货物的当前真实位置与当前期望位置之间的位置偏差增大时,减少r的值,当目标货物的当前真实位置与当前期望位置之间的位置偏差减小时,增大r的值,以使得目标货物平滑跟踪期望搬运轨迹。
115.若按照上述方式去获取目标货物的期望位置,进而计算目标货物的期望速度则会引导目标货物平滑跟踪期望搬运轨迹。图3为采用引导圆制导方法渐进跟踪直线轨迹的示意图,如图3所示,其中,图中的黑点为变化的目标货物的期望位置,图中的箭头为根据目标货物的当前期望位置和当前真实位置计算出的目标货物的当前期望速度矢量。则目标货物会沿着图中的弧线所示的轨迹移动,最终跟踪上期望搬运轨迹,且整个过程中目标货物的
期望速度是不会突变的,即目标货物的移动过程是平滑的。
116.一可选实施例中,当期望搬运轨迹为圆弧轨迹时,步骤1031中,根据目标货物的当前真实位置和期望搬运轨迹,确定目标货物的当前期望位置,包括:
117.构造以目标货物的当前真实位置为圆心,以预设半径r为半径的当前引导圆;
118.若当前引导圆与圆弧轨迹不相交,连接圆弧轨迹的圆心与目标货物的当前真实位置,将该连接线的延长线与当前引导圆的交点作为目标货物的当前期望位置;和/或,
119.若当前引导圆与圆弧轨迹相交,连接目标货物的当前真实位置与圆弧轨迹的圆心,则该连接线的延长线在圆弧轨迹上的切线与当前引导圆相交,在相交的交点中选择距离圆弧轨迹的终点近的交点作为目标货物的当前期望位置;和/或,
120.若期望搬运轨迹的终点在当前引导圆内,将期望搬运轨迹的终点作为目标货物的当前期望位置。
121.图4-1、4-2和4-3为当期望搬运轨迹为圆弧轨迹时,在目标货物的当前真实位置处于不同情况时,确定目标货物的当前期望位置的示意图,其中:
122.图4-1中,当前引导圆与圆弧轨迹不相交,且期望搬运轨迹的终点在当前引导圆外,连接圆弧轨迹的圆心与当前引导圆的圆心,将该连接线的延长线与当前引导圆的交点d作为目标货物的当前期望位置;
123.图4-2中,当前引导圆与圆弧轨迹相交,且期望搬运轨迹的终点在当前引导圆外,连接圆弧轨迹的圆心与当前引导圆的圆心,则该连接线l1的延长线在圆弧轨迹上的切线l2与当前引导圆相交,在相交的交点中选择距离圆弧轨迹的终点近的交点e作为目标货物的当前期望位置;
124.上述两种情况,期望搬运轨迹的终点都不在当前引导圆内。
125.图4-3中,期望搬运轨迹的终点在当前引导圆内,直接将期望搬运轨迹的终点作为目标货物的当前期望位置。
126.采用引导圆制导的方式求解目标货物的当前期望位置时,可以看出:目标货物的当前期望位置始终在引导圆上或者引导圆内,因此,目标货物的当前期望位置和当前真实位置的距离始终不大于引导圆的半径。
127.引导圆制导算法跟踪其他轨迹其本质都是引导目标货物沿着期望搬运轨迹行进,并且在搬运终点处于引导圆内之前,期望位置在引导圆的圆周上选取。针对其他的曲线轨迹的制导方法都类似,因此不赘述。
128.一可选实施例中,步骤1032中,利用在期望搬运轨迹上的期望航向和目标货物的当前真实航向,获取目标货物的当前期望角速度,包括:
129.在期望搬运轨迹上查找与目标货物的当前真实位置最近的点,将最近的点的期望航向作为目标货物的当前期望航向;根据目标货物的当前真实航向和当前期望航向,计算目标货物的当前期望角速度。
130.一可选实施例中,步骤1034中,根据目标货物的当前期望速度、目标货物的当前期望角速度和每个移动机器人在目标货物坐标系下的当前期望速度,获取每个移动机器人的当前速度控制量和当前航向控制量,包括:
131.针对每个移动机器人,将该移动机器人在目标货物坐标系下的当前期望速度(该速度具有方向,是一个矢量,其方向为:由移动机器人的当前真实位置指向移动机器人的当
前期望位置的方向)从目标货物坐标系下转换到全局坐标系下,得到第一速度矢量;
132.根据目标货物的当前期望速度获取第二速度矢量,根据目标货物的当前期望角速度获取第三速度矢量;
133.将第一速度矢量、第二速度矢量和第三速度矢量进行矢量相加,得到该移动机器人的当前期望速度矢量;
134.对该移动机器人的当前期望速度矢量进行矢量分解,其中,矢量的大小即为该移动机器人的当前期望速度,矢量的方向即为该移动机器人的当前期望航向;
135.根据该移动机器人的当前期望速度和当前真实速度,确定该移动机器人的当前速度控制量,根据该移动机器人的当前期望航向和当前真实航向,确定该移动机器人的当前航向控制量。
136.图5为本发明实施例提供的采用基于基点法的运动学逆解运算获取agv的当前期望速度和当前期望航向的过程示意图,如图5所示,其中,将agv在目标货物坐标系下的当前期望速度进行坐标转换,即从目标货物坐标系下转换到全局坐标系下,得到该agv在全局坐标系下的第一速度矢量v1;
137.对目标货物的当前期望速度和当前期望角速度(该角速度也是一个矢量)进行基于基点法的运动学逆解运算,得到该agv在全局坐标系下的第二速度矢量v2和第三速度矢量v3;
138.将v1、v2和v3进行速度矢量融合,得到该agv在全局坐标下的当前期望速度矢量v;
139.对v进行矢量分解,得到该移动机器人的当前期望速度和当前期望航向。
140.一可选实施例中,步骤1034中,根据目标货物的当前期望速度获取第二速度矢量,包括:
141.将目标货物的当前期望速度矢量平移到该移动机器人所在位置处,得到第二速度矢量;
142.根据目标货物的当前期望角速度获取第三速度矢量,包括:
143.将目标货物的当前期望角速度矢量与目标货物的当前真实位置到该移动机器人所在位置的距离矢量进行矢量相乘,得到第三速度矢量。
144.图6为本发明实施例提供的以两个移动机器人协同搬运目标货物为例,通过基于基点法的运动学逆解运算,将目标货物的当前期望速度和当前期望角速度转换成移动机器人的当前期望速度矢量(即v2)和(即v3)的示意图。
145.如图6所示,所有变量都是在全局系下,目标货物的当前期望速度为目标货物(绕目标货物中心旋转)的当前期望角速度为目标货物的位置为o,移动机器人a的位置为p1,移动机器人b的位置为p2,则根据基点法可得到目标货物的当前期望角速度在p1点处产生的速度矢量为处产生的速度矢量为目标货物的当前期望速度在p1点处产生的速度矢量为则p1点的合速度矢量为即移动机器人a的期望速度矢量为同理可计算出移动机器人b的期望速度矢量
146.上述步骤1031-1034中,具体的算法不做限定,例如:可采用经典pid(proportional-integral-derivative,比例—积分—微分)控制、自抗扰控制、模型预测控制等算法,算法的功能都是根据期望状态、当前状态计算出控制量以使得当前状态能够跟踪上期望状态。例如:根据目标货物的当前期望位置(即期望状态)和当前真实位置(即当前状态),计算出目标货物的当前期望速度(即控制量),以使得目标货物的当前真实位置能够跟踪上当前期望位置。
147.图7为本发明另一实施例提供的协同搬运方法流程图,其具体步骤如下:
148.步骤701:接收协同搬运任务,该任务内容包括:目标货物信息、搬运的起点和终点等,其中,目标货物的信息包括:目标货物的当前位置、目标货物的形状和尺寸等。
149.本实施例的执行主体为控制器,该控制器可以独立于机器人编组,或者也可位于机器人编组中的一个机器人上。
150.步骤702:根据目标货物的形状和尺寸等,确定执行该任务所需要的机器人编组中的移动机器人的数量,并确定机器人编组的期望队形信息;根据搬运的起点和终点,规划期望搬运轨迹以及在期望搬运轨迹上的期望航向。
151.其中,期望队形信息包含机器人编组中的每个移动机器人相对于目标货物的期望相对位置。
152.步骤703:在协同搬运过程中,根据目标货物的当前真实位置和期望搬运轨迹,确定目标货物的当前期望位置;根据目标货物的当前期望位置和目标货物的当前真实位置,计算目标货物的当前期望速度。
153.步骤704:在期望搬运轨迹上查找与目标货物的当前真实位置最近的点,将最近的点的期望航向作为目标货物的当前期望航向;根据目标货物的当前真实航向和当前期望航向,计算目标货物的当前期望角速度。
154.步骤705:利用机器人编组的期望队形信息和当前真实队形信息,获取机器人编组中的每个移动机器人在目标货物坐标系下的当前期望速度。
155.步骤706:针对机器人编组中的每个移动机器人,将该移动机器人在目标货物坐标系下的当前期望速度矢量从目标货物坐标系下转换到全局坐标系下,得到第一速度矢量;将目标货物的当前期望速度矢量平移到该移动机器人所在位置处得到第二速度矢量;将目标货物的当前期望角速度矢量与目标货物所在位置到该移动机器人所在位置的距离矢量进行矢量叉乘,得到第三速度矢量;将第一速度矢量、第二速度矢量和第三速度矢量进行矢量相加,得到该移动机器人的当前期望速度矢量;对该移动机器人的当前期望速度矢量进行矢量分解,其中,矢量的大小即为该移动机器人的当前期望速度,矢量的方向即为该移动机器人的当前期望航向。
156.步骤707:针对机器人编组中的每个移动机器人,根据该移动机器人的当前真实速度和当前期望速度,计算该移动机器人的当前速度控制量,根据该移动机器人的当前真实航向和当前期望航向,计算该移动机器人的当前航向控制量,根据当前速度控制量和当前航向控制量进行控制量融合后生成电机指令,将该电机指令发送给该移动机器人的电机驱动器。
157.图8为本发明实施例提供的协同搬运装置的结构示意图,该装置主要包括:
158.预处理模块81,用于确定被指派了协同搬运任务的机器人编组的期望队形信息,
其中,机器人编组包含至少两个移动机器人,期望队形信息包含机器人编组中的每个移动机器人相对于协同搬运任务指定的目标货物的期望相对位置;获取目标货物的期望搬运轨迹和在期望搬运轨迹上的期望航向。
159.协同控制模块82,用于利用预处理模块81获取的期望队形信息以及期望搬运轨迹和在期望搬运轨迹上的期望航向,确定每个移动机器人在协同搬运过程中的行进方向和行进速度,以使目标货物在协同搬运过程中的移动轨迹趋近于期望搬运轨迹。
160.本发明实施例还提供一种非瞬时计算机可读存储介质,非瞬时计算机可读存储介质存储指令,指令在由处理器执行时使得处理器执行如上任一实施例所述的协同搬运方法的步骤。
161.图9为本发明实施例提供的电子设备的结构示意图,该电子设备包括上所述的非瞬时计算机可读存储介质91、以及可访问非瞬时计算机可读存储介质91的处理器92。
162.图10为本发明实施例提供的协同搬运系统的结构示意图,该系统主要包括:控制器101和多个移动机器人102,该多个移动机器人102构成一个机器人编组,其中:
163.控制器101,用于确定被指派了协同搬运任务的机器人编组的期望队形信息;获取目标货物的期望搬运轨迹和在期望搬运轨迹上的期望航向;利用期望队形信息以及期望搬运轨迹和在期望搬运轨迹上的期望航向,确定每个移动机器人在协同搬运过程中的行进方向和行进速度,将每个移动机器人在协同搬运过程中的行进方向和行进速度发送给对应移动机器人,以使目标货物在协同搬运过程中的移动轨迹趋近于期望搬运轨迹;其中,机器人编组包含至少两个移动机器人,期望队形信息包含机器人编组中的每个移动机器人相对于协同搬运任务指定的目标货物的期望相对位置。
164.移动机器人102,用于按照控制器101发来的本机器人在协同搬运过程中的行进方向和行进速度行进。
165.一可选实施例中,控制器101确定被指派了协同搬运任务的机器人编组的期望队形信息,包括:获取目标货物在期望队形上的期望位置;获取每个移动机器人在期望队形中的期望位置;将每个移动机器人在期望队形中的期望位置相对于目标货物在期望队形上的期望位置的相对位置作为每个移动机器人相对于目标货物的期望相对位置。
166.一可选实施例中,控制器101利用期望队形信息以及期望搬运轨迹和在期望搬运轨迹上的期望航向,确定每个移动机器人在协同搬运过程中的行进方向和行进速度,包括:在协同搬运过程中,根据向各个移动机器人102获取的各移动机器人当前所在的位置和当前航向,确定目标货物的当前真实位置和当前真实航向以及机器人编组的当前真实队形信息;利用期望搬运轨迹和目标货物的当前真实位置,获取目标货物的当前期望速度;利用在期望搬运轨迹上的期望航向和目标货物的当前真实航向,获取目标货物的当前期望角速度;利用机器人编组的期望队形信息和当前真实队形信息,获取机器人编组中的每个移动机器人在目标货物坐标系下的当前期望速度;根据目标货物的当前期望速度、目标货物的当前期望角速度和每个移动机器人在目标货物坐标系下的当前期望速度,获取每个移动机器人的当前速度控制量和当前航向控制量。
167.一可选实施例中,控制器101利用期望搬运轨迹和目标货物的当前真实位置,获取目标货物的当前期望速度,包括:根据目标货物的当前真实位置和期望搬运轨迹,确定目标货物的当前期望位置;根据目标货物的当前期望位置和目标货物的当前真实位置,计算目
标货物的当前期望速度。
168.一可选实施例中,当期望搬运轨迹为直线轨迹时,控制器101根据目标货物的当前真实位置和期望搬运轨迹,确定目标货物的当前期望位置,包括:构造以目标货物的当前真实位置为圆心,以预设半径为半径的当前引导圆;且,当当前引导圆与期望搬运轨迹不相交且期望搬运轨迹的终点在当前引导圆外时,连接当前引导圆的圆心与期望搬运轨迹的起点,若连接线与期望搬运轨迹的夹角大于90
°
,则将连接线与当前引导圆的交点作为目标货物的当前期望位置;若连接线与期望搬运轨迹的夹角不大于90
°
,则将当前引导圆的圆心到期望搬运轨迹上的垂直线与当前引导圆的交点作为目标货物的当前期望位置;和/或,当当前引导圆与期望搬运轨迹相交且期望搬运轨迹的终点在当前引导圆外时,选择距离期望搬运轨迹的终点近的交点作为目标货物的当前期望位置;和/或,当期望搬运轨迹的终点在当前引导圆内时,将期望搬运轨迹的终点作为目标货物的当前期望位置。
169.一可选实施例中,当期望搬运轨迹为圆弧轨迹时,控制器101根据目标货物的当前真实位置和期望搬运轨迹,确定目标货物的当前期望位置,包括:构造以目标货物的当前真实位置为圆心,以预设半径为半径的当前引导圆;若当前引导圆与圆弧轨迹不相交且期望搬运轨迹的终点在当前引导圆外时,连接圆弧轨迹的圆心与目标货物的当前真实位置,将该连接线的延长线与当前引导圆的交点作为目标货物的当前期望位置;和/或,若当前引导圆与圆弧轨迹相交且期望搬运轨迹的终点在当前引导圆外时,连接目标货物的当前真实位置与圆弧轨迹的圆心,则该连接线的延长线在圆弧轨迹上的切线与当前引导圆相交,在相交的交点中选择距离圆弧轨迹的终点近的交点作为目标货物的当前期望位置;和/或,若期望搬运轨迹的终点在当前引导圆内,则将期望搬运轨迹的终点作为目标货物的当前期望位置。
170.一可选实施例中,控制器101利用在期望搬运轨迹上的期望航向和目标货物的当前真实航向,获取目标货物的当前期望角速度,包括:在期望搬运轨迹上查找与目标货物的当前真实位置最近的点,将最近的点的期望航向作为目标货物的当前期望航向;根据目标货物的当前真实航向和当前期望航向,计算目标货物的当前期望角速度。
171.一可选实施例中,控制器101根据目标货物的当前期望速度、目标货物的当前期望角速度和每个移动机器人在目标货物坐标系下的当前期望速度,获取每个移动机器人的当前速度控制量和当前航向控制量,包括:针对每个移动机器人,将该移动机器人在目标货物坐标系下的当前期望速度从目标货物坐标系下转换到全局坐标系下,得到第一速度矢量;根据目标货物的当前期望速度获取第二速度矢量,根据目标货物的当前期望角速度获取第三速度矢量;将第一速度矢量、第二速度矢量和第三速度矢量进行矢量相加,得到该移动机器人的当前期望速度矢量;对该移动机器人的当前期望速度矢量进行矢量分解,其中,矢量的大小即为该移动机器人的当前期望速度,矢量的方向即为该移动机器人的当前期望航向;根据该移动机器人的当前期望速度和当前真实速度,确定该移动机器人的当前速度控制量,根据该移动机器人的当前期望航向和当前真实航向,确定该移动机器人的当前航向控制量。
172.一可选实施例中,控制器101根据目标货物的当前期望速度获取第二速度矢量,包括:将目标货物的当前期望速度作为该移动机器人所在位置处的第二速度矢量;
173.控制器101根据目标货物的当前期望角速度获取第三速度矢量,包括:将目标货物
的当前期望角速度与目标货物的当前真实位置到该移动机器人所在位置的距离进行矢量叉乘,得到第三速度矢量。
174.在实际应用中,控制器101可独立于机器人编组,也可位于机器人编组中的一个移动机器人102上。
175.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明保护的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1