一种四旋翼无人机飞行控制系统的制作方法
1.本实用新型涉及无人机系统设计领域,特别涉及四旋翼无人机飞行控制及其架构设计工作。
背景技术:
2.近年来,无人机技术及其应用发展迅速;能够实现面向飞行器的无人驾驶,可实现基于地面站的无线远程遥控,且面向民用的无人机价格在可接受范围内;在应用中,可利用无人机执行较为危险的任务,如在抗震救灾中,可远程遥控无人机飞向救援人员较难进入的区域,对地震破坏情况及幸存人员情况进行侦查;还如在战争中,利用无人机飞向危险地带进行战况侦查或进行战斗;普通家庭及一般民众可购买无人机进行控制娱乐或开展航模比赛;在生产领域,可以利用无人机进行农药喷洒,远程遥控无人机进行空中测绘等;如何设计无人机飞控系统,使操作更灵活、飞行控制更稳定成为一项研究课题。
3.当前无人机飞行控制系统专利研究较为丰富,如2018年4月申请公布的题为“一种基于手机的飞行控制装置”的发明专利,通过采用系统级虚拟化技术对android手机进行虚拟化,进而在android手机上可以运行两个系统,并在一个系统中刷入无人机飞行控制系统,达到对无人机飞行进行控制的效果;2019年8月授权的题为“无人机的控制方法、装置及无人飞行器”的发明专利,通过对飞行控制器的故障检测、通信系统与地面站的通讯故障检测、动力系统的故障检测,确定无人飞行器是否故障,若无人飞行器出现故障,则控制无人飞行器的脚架释放,避免无人飞行器出现紧急故障坠落时无法即时释放脚架,防止无人飞行器触地时机体、云台、相机等设备受损。
技术实现要素:
4.鉴于上述背景信息,本实用新型旨在提供一种四旋翼无人机飞行控制系统,解决无人机飞行控制的稳定及可靠问题。
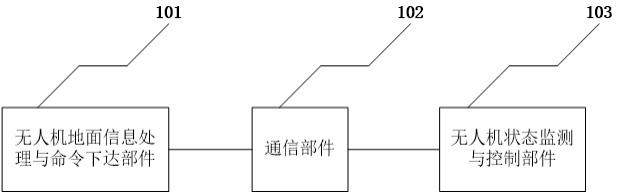
5.为实现上述目的,本实用新型提供一种四旋翼无人机飞行控制系统,该系统包括无人机地面信息处理与命令下达部件101、通信部件102、无人机状态监测与控制部件103;所述无人机地面信息处理与命令下达部件101与通信部件102相连,通信部件102与无人机状态监测与控制部件103相连。
6.优选的,所述无人机地面信息处理与命令下达部件101包括vr虚拟现实服务器201、飞行地图数据库服务器202、图像识别与自动避障服务器203、故障检测与处理服务器204、人机交互终端机205;所述人机交互终端机205与vr虚拟现实服务器201相连,人机交互终端机205与飞行地图数据库服务器202相连,人机交互终端机205和图像识别与自动避障服务器203相连,人机交互终端机205和故障检测与处理服务器204相连。
7.优选的,所述通信部件102包括地面站通信接口304、天通卫星通信组件301、5g通信组件302、微波图传组件303、无人机通信接口305;所述地面站通信接口304与天通卫星通信组件301相连,地面站通信接口304与5g通信组件302相连,地面站通信接口304与微波图
传组件303相连,无人机通信接口305与天通卫星通信组件301相连,无人机通信接口305与5g通信组件302相连,无人机通信接口305与微波图传组件303相连。
8.优选的,所述无人机状态监测与控制部件103包括北斗定位与速度计算模块401、三轴陀螺仪402、旋翼驱动器403、arm微处理器404、无人机前摄像头405、无人机顶摄像头406、无人机后摄像头407;所述arm微处理器404与北斗定位与速度计算模块401相连,arm微处理器404与三轴陀螺仪402相连,arm微处理器404与旋翼驱动器403相连,arm微处理器404与无人机前摄像头405相连,arm微处理器404与无人机顶摄像头406相连,arm微处理器404与无人机后摄像头407相连。
附图说明
9.图1为本实用新型系统架构图。
10.图2为图1中无人机地面信息处理与命令下达部件101的结构图。
11.图3为图1中通信部件102的结构图。
12.图4为图1中无人机状态监测与控制部件103的结构图。
具体实施方式
13.图1给出了本实用新型系统架构图;由图1所示,101为无人机地面信息处理与命令下达部件、102为通信部件、103为无人机状态监测与控制部件;所述无人机地面信息处理与命令下达部件101与通信部件102相连,通信部件102与无人机状态监测与控制部件103相连。
14.图2给出了图1中无人机地面信息处理与命令下达部件101的结构图;由图2所示,201为vr虚拟现实服务器、202为飞行地图数据库服务器、203为图像识别与自动避障服务器、204为故障检测与处理服务器、205为人机交互终端机;所述人机交互终端机205与vr虚拟现实服务器201相连,人机交互终端机205与飞行地图数据库服务器202相连,人机交互终端机205和图像识别与自动避障服务器203相连,人机交互终端机205和故障检测与处理服务器204相连。
15.图3给出了图1中通信部件102的结构图;由图3所示,304为地面站通信接口、301为天通卫星通信组件、302为5g通信组件、303为微波图传组件、305为无人机通信接口;所述地面站通信接口304与天通卫星通信组件301相连,地面站通信接口304与5g通信组件302相连,地面站通信接口304与微波图传组件303相连,无人机通信接口305与天通卫星通信组件301相连,无人机通信接口305与5g通信组件302相连,无人机通信接口305与微波图传组件303相连。
16.图4给出了图1中无人机状态监测与控制部件103的结构图;由图4所示,401为北斗定位与速度计算模块、402为三轴陀螺仪、403为旋翼驱动器、404为arm微处理器、405为无人机前摄像头、406为无人机顶摄像头、407为无人机后摄像头;所述arm微处理器404与北斗定位与速度计算模块401相连,arm微处理器404与三轴陀螺仪402相连,arm微处理器404与旋翼驱动器403相连,arm微处理器404与无人机前摄像头405相连,arm微处理器404与无人机顶摄像头406相连,arm微处理器404与无人机后摄像头407相连。
17.一种四旋翼无人机飞行控制系统的工作模式是:通信部件102集成了天通卫星通
信组件301、5g通信组件302、微波图传组件303,可实现卫星通信、5g通信和微波图传通信功能;通信部件102通过地面站通信接口304接收无人机地面信息处理与命令下达部件101的信息,并将信息通过无人机通信接口305传送至无人机状态监测与控制部件103;通信部件102通过无人机通信接口305接收无人机状态监测与控制部件103的信息,并将信息通过地面站通信接口304传送至无人机地面信息处理与命令下达部件101;无人机状态监测与控制部件103通过无人机前摄像头405、无人机顶摄像头406、无人机后摄像头407采集视频图像,并将信息发送至无人机通信接口305;arm微处理器404通过北斗定位与速度计算模块401获取当前经纬度、高程和速度信息,并将信息发送至无人机通信接口305;arm微处理器404通过三轴陀螺仪402采集无人机的姿态信息,并将信息发送至无人机通信接口305;arm微处理器404通过旋翼驱动器403控制无人机的飞行状态;在应用中,用户通过人机交互终端机205使用本系统;vr虚拟现实服务器201通过人机交互终端机205向用户展示基于无人机飞行数据的三维全景虚拟现实画面;飞行地图数据库服务器202通过人机交互终端机205向用户提供基于地图的飞行轨迹;用户可通过人机交互终端机205启动图像识别与自动避障服务,图像识别与自动避障服务器203可实现基于飞行画面的障碍物识别,并将避障控制命令发送至地面站通信接口304,arm微处理器404接收到控制命令后通过旋翼驱动器403控制无人机的飞行状态,达到无人机自动避障效果;用户可通过人机交互终端机205启动故障检测与处理服务,故障检测与处理服务器204对实时接收到的无人机状态信息进行存储和分析,对异常情况进行报警,并给出处理对策。
18.显而易见,上述实施方式仅仅为本实用新型的其中一个示范例,任何在本实用新型所提供结构或原理上的简单改进均属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1