一种工业机器人急停安全系统的制作方法
1.本实用新型涉及工业机器人急停控制电路领域。
背景技术:
2.目前,在现有的工业机器人中,会通过将多个急停按钮(示教器急停、面板急停、外部急停)串联来实现任一路急停按下即切断主电的功能,但存在无法快速定位哪一路急停被按下,或者是为了实现检测而增加多个继电器从而占用更多空间,增加了成本。另外,随着用户对于工业机器人的安全性能要求不断提高,安全急停、安全复位、上电确认是必备需求。
技术实现要素:
3.本实用新型针对以上问题,提出了一种可以适用于工业机器人,并可以实现安全急停、安全复位、上电确认的工业机器人急停安全系统。
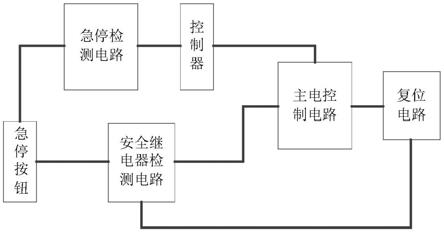
4.本实用新型的技术方案为:所述急停安全系统包括急停按钮、急停检测电路、控制器、主电控制电路、复位电路以及安全继电器检测电路;
5.所述急停按钮经过急停检测电路连接控制器,所述控制器连接主电控制电路,通过所述急停检测电路实现多路急停按钮的一一检测;
6.所述主电控制电路包括用于控制主电回路通断的主电继电器;
7.所述急停按钮还经过安全继电器检测电路连接主电控制电路,所述安全继电器检测电路包括安全继电器,通过安全继电器检测急停信号;
8.所述安全继电器还与主电继电器串联,通过主电控制电路实现上电确认功能并与安全继电器配合控制主电继电器的通断,从而控制主电的通断动作;
9.所述主电继电器的线圈负端连接复位电路,所述复位电路中包括复位按钮,并且复位电路连接安全继电器,通过复位电路实现安全继电器的正常启动。
10.所述急停按钮具有三个,分别为面板急停按钮sb1、示教器急停按钮sb2、外部急停按钮sb3。
11.所述急停检测电路包括多个第一急停检测光耦;
12.所述面板急停按钮sb1、示教器急停按钮sb2、外部急停按钮sb3的一端接均至直流电源正,并且三者的另一端分别经过第一限流电阻接入各个第一急停检测光耦的输入端;所有第一急停检测光耦的输出均经过阻容滤波后接入控制器,通过控制器来检测急停信号。
13.所述安全继电器检测电路包括安全继电器以及多个第二急停检测光耦;
14.所述面板急停按钮sb1、示教器急停按钮sb2、外部急停按钮sb3远离直流电源的一端分别经过第二限流电阻接入各个第二急停检测光耦的输入端,所述第二急停检测光耦的输出端接入安全继电器,通过安全继电器进行急停检测。
15.所述安全继电器的型号为usr22。
16.所述主电控制电路包括上电确认按钮sb4、或门、隔离光耦、三极管以及主电继电器;
17.所述控制器的输出和上电确认按钮sb4分别接入或门的两个输入端,同时上电确认按钮sb4通过上拉至或门的输出端,或门的输出接入隔离光耦输入端,隔离光耦的输出端经过第三限流电阻接至三极管基极,三极管的发射极接直流电源负;直流电源正依次连接主电继电器的线圈、安全继电器的常开触点以及三极管的集电极。
18.所述复位电路包括主电检测光耦以及复位按钮sb5;
19.所述主电继电器的线圈负端经过第四限流电阻接至主电检测光耦的输入端,所述主电检测光耦的集电极接直流电源正,所述主电检测光耦的发射极接至复位按钮sb5一端,复位按钮sb5的另一端接至安全继电器。
20.三个急停按钮均有两组常闭触点,因此会有六个急停信号;
21.安全继电器检测电路中具有两组第二急停检测光耦,每组具有三个;每一组第二急停检测光耦的输入都分别连接面板急停按钮sb1、示教器急停按钮sb2、外部急停按钮sb3的一组常闭触点;
22.同一组中第二急停检测光耦的输出首尾相接,其中一组第二急停检测光耦的输出接入安全继电器的t1端和r1端,另一组第二急停检测光耦的输出接入安全继电器t2端和r2端;
23.上电确认按钮、或门、隔离光耦、三极管、主电继电器均为双组,其中一组主电继电器的线圈与安全继电器的13端、14端串接,另一组主电继电器线圈与安全继电器33端、34端串接,两个主电继电器的常开触点串联在主电回路中。
24.本实用新型的有益效果:通过急停按钮、控制器、安全继电器的配合,控制工业机器人主电接通和关断,任一路急停按下即可切断主电并能定位哪一路急停按下,方便故障解除后快速恢复。同时,急停按钮通过光耦电路输出两组信号,连接至安全继电器的t和r双通道,只要有一通道存在开路或者双通道的触点间有短路,安全继电器就会报警,进而切断主电,提高了主回路的安全性。另外,安全继电器检测急停按钮无按下后需要按下复位按钮才能闭合13/14、33/34两组常开触点,主电接通后复位按钮立即失效,防止了误触碰导致主电切断,同样的,急停按钮按下随后恢复后,重新按下复位按钮就能使安全继电器正常工作,避免了断电重启,提高了效率。最后,上电确认按钮及主电控制电路的存在保证了在工业机器人手动及自动模式切换时能够切断主电,一切准备就绪后必须按下上电确认按钮后才能重新上主电,随后上电确认按钮失效防止误触碰,满足了工业机器人的相关安全标准(gb 11291.1
‑
2011)。
附图说明
25.图1为本实用新型的电路框图,
26.图2为急停检测电路的电路图,
27.图3为主电控制电路的电路图,
28.图4为复位电路的电路图,
29.图5为安全继电器检测电路的电路图。
具体实施方式
30.为能清楚说明本专利的技术特点,下面通过具体实施方式,并结合其附图,对本专利进行详细阐述。
31.如图1至图5所示,包括急停按钮、急停检测电路、控制器、安全继电器检测电路、主电控制电路、复位电路。
32.急停检测电路包括面板急停按钮sb1、示教器急停按钮sb2、外部急停按钮sb3、第一急停检测光耦以及第一限流电阻。
33.安全继电器检测电路包括第二限流电阻、第二急停检测光耦、安全继电器。
34.主电控制电路包括上电确认按钮sb4、或门、隔离光耦、三极管、主电继电器以及第三限流电阻、上拉电阻。
35.复位电路包括第四限流电阻、主电检测光耦、复位按钮sb5。
36.如图2、5所示,面板急停按钮sb1、示教器急停按钮sb2、外部急停按钮sb3各有两组常闭触点,每组常闭触点一端接入24v,另一端分别通过限流电阻接入第一急停检测光耦以及第二急停检测光耦;
37.第一急停检测光耦具有六个,六个第一急停检测光耦的输出都接入控制器,从而将六个急停状态反馈给控制器以实现独立检测;
38.第二急停检测光耦分为两组,每组具有三个;同一组中第二急停检测光耦的输出首尾相接(具体来说:同一组中上一个第二急停检测光耦的发射极连接下一个第二急停检测光耦的集电极,此组第二急停检测光耦输出剩下的集电极接安全继电器的t端,剩下的发射极接安全继电器的r端),其中一组第二急停检测光耦的输出接入安全继电器的t1端和r1端,另一组第二急停检测光耦的输出接入安全继电器t2端和r2端,通过安全继电器的两组检测端分别检测三组急停的通断;
39.当任一急停按钮按下时,由于第二急停检测光耦的输出端串联在一起,任一个光耦输出截止都使得安全继电器的r端无法接受t端发送的动态检测信号,因此安全继电器的13/14之间、33/34之间常开触点断开,与其串联的主电继电器线圈失电,主电回路断开。
40.如图3所示,主电控制电路中具有两个或门,或门具有两个输入端和一个输出端,控制器的主电控制信号接入到两个或门的一个输入端,两个或门的另一输入端连接上电确认按钮sb4,同时此输入端通过电阻连接至或门的输出端,上电确认按钮sb4远离或门的一端接数字地;或门输出端通过上拉电阻连接到数字电源正,两个或门的输出分别接至两个隔离光耦的输入阴极,两个隔离光耦的输入阳极通过限流电阻接数字电源正,隔离光耦输出端的集电极接直流电源24v,发射极通过限流电阻和下拉电阻分别连接至三极管的基极和发射极,三极管的发射极接直流电源负端,直流电源24v依次与主电继电器的线圈、安全继电器的常开触点、三极管的集电极串联。
41.如图4所示,复位电路同样包括两个主电检测光耦,两个主电检测光耦输入的阳极分别通过限流电阻接主电继电器线圈的负端,两个光耦输入的阴极接直流电源0v,其中一个主电检测光耦输出端的集电极接直流电源24v正,其发射极接另一主电检测光耦的集电极;另一主电检测光耦的发射极接复位按钮sb5的一端,复位按钮sb5另一端接至安全继电器的x1。
42.工作原理:
43.当面板急停按钮sb1、示教器急停按钮sb2、外部急停按钮sb3均无按下时,其包含的六个常闭触点闭合,第一急停检测光耦原边均导通,副边均为低电平信号,控制器检测到均为低电平信号后认为急停按钮均无按下,会发出上主电低电平信号,此时无法上主电,必须进一步按下复位按钮sb5和上电确认按钮sb4。
44.同时,当急停按钮均无按下时,安全继电器检测电路中第二急停检测光耦的副边均导通,安全继电器的r1、r2能分别接收到来自t1、t2的动态检测信号,但此时安全继电器的常开触点13/14、33/34仍无法闭合,复位电路中的主电检测光耦输入端处于导通状态,主电检测光耦输出端因此导通,当复位按钮sb5按下后,安全继电器x1获得高电平能够有效复位,安全继电器常开触点13/14、33/34随后闭合,主电控制器电路中控制器发出低电平的上主电信号,但或门的输出仍为高电平,三极管未导通,电气回路仍无法上主电,需要再按下上电确认按钮sb4,此时主电控制电路或门两个输入均为低电平,或门输出变为低电平,隔离光耦原边导通,副边随后导通,三极管处于饱和导通状态,因此两组主电继电器线圈得电,由于此两组主电继电器的常开触点串联接入主回路中,此时能够使主电闭合。当主电继电器得电后,复位电路中的两组光耦由于输入不导通,光耦副边断开,此时复位按钮sb5失效,由于或门输出为低电平,上电按钮sb4松开后同样保持低电平,此时sb4也同样失效,避免了发生sb4和sb5被误动作的可能。
45.任一急停按下时,控制器能够独立检测出急停按钮按下的位置,并发出下主电高电平信号,此时或门输入为高电平,或门输出变为高电平,主电控制电路中光耦不导通,三极管关断,与此同时由于安全继电器的r1、r2无法接收到来自t1、t2的动态检测信号,安全继电器的触点13/14、33/34断开,三极管关断、安全继电器触点开路均能保证主电继电器线圈失电,从而主电被切断。
46.当某一急停按下随后又恢复后,控制器会重新发送上主电低电平信号,安全继电器r端会重新检测到t端发出的动态检测信号,同样的,需要按下复位按钮sb5和上电确认按钮sb4后,才能正常上主电。
47.另外,依据机器人相关安全标准要求(gb 11291.1
‑
2011),当控制器由自动到手动模式互相切换时,控制器会发出下主电高电平信号,此时会下主电,控制器重新发送上主电低电平信号后,不能上主电,需要上电确认按钮sb4按下后才能重新上主电,随后由控制器完成自动和手动间的模式切换。
48.本实用新型具体实施途径很多,以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以作出若干改进,这些改进也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1